An Accurate Beam-Tracking Algorithm with Adaptive Beam Reconstruction via UAV-BSs for Mobile Users

0

Sign in to get full access
Overview
- Presents a beam-tracking algorithm that enables accurate and adaptive beam reconstruction for mobile users served by UAV-based base stations (UAV-BSs).
- The algorithm leverages angle-aware predictive beamforming to track the beam direction and reconstruct it as users move.
- Enables reliable communication between mobile users and UAV-BSs, even in challenging, dynamic environments.
Plain English Explanation
The paper describes a new way to keep a wireless connection stable between a moving person's device (like a smartphone) and a drone-mounted base station. Normally, as the person moves, the wireless signal can get disrupted or lost.
The key innovation is an "angle-aware predictive beamforming" algorithm. This allows the drone to continuously track the direction of the person's device and adjust the wireless beam to follow it, even as the person moves around.
This "beam-tracking" approach helps maintain a strong, reliable wireless connection between the drone and the person's device, even in challenging, changing environments. It could enable better wireless services from drone-based base stations for people on the move.
Technical Explanation
The paper proposes an "Accurate Beam-Tracking Algorithm with Adaptive Beam Reconstruction via UAV-BSs for Mobile Users." The core idea is to leverage "angle-aware predictive beamforming" to continuously track the beam direction and adaptively reconstruct it as mobile users move.
The algorithm works as follows:
- It first estimates the angle of arrival (AoA) of the signal from the mobile user's device.
- It then uses this AoA information to predict the future beam direction and reconstruct the beam accordingly.
- This adaptive beam reconstruction is enabled by the flexible, dynamic positioning of the UAV-mounted base stations (UAV-BSs).
The authors evaluate the performance of their beam-tracking approach through detailed simulations. They show that it can maintain a stable, reliable wireless connection even as users move around, outperforming conventional beamforming techniques. The "ground-to-UAV 140 GHz channel measurement" data provides insights into the propagation characteristics enabling this performance.
Critical Analysis
The paper presents a compelling solution for maintaining reliable wireless connectivity for mobile users served by UAV-BSs. The "model-predictive trajectory generation for autonomous aerial search" approach to adaptive beam reconstruction is a key strength, enabling the system to dynamically adapt to user movements.
However, the paper does not address several practical considerations. For example, it does not discuss how the beam-tracking algorithm would scale to handle multiple simultaneous mobile users, or how it would perform in crowded urban environments with many obstacles. Additionally, the reliance on accurate AoA estimation could be a potential vulnerability in noisy, multipath-rich scenarios.
Further research is needed to explore the real-world feasibility and robustness of this beam-tracking approach, as well as its integration with other UAV-BS system components. Careful consideration of implementation challenges and edge cases would strengthen the overall contribution.
Conclusion
This paper presents an innovative beam-tracking algorithm that enables accurate and adaptive beam reconstruction for mobile users served by UAV-BSs. By leveraging angle-aware predictive beamforming, the system can maintain a stable wireless connection even as users move around, a key capability for reliable communication in dynamic environments.
The technical details and simulation results suggest this approach has the potential to significantly improve the performance of UAV-based wireless networks for mobile users. However, further research is needed to address practical implementation challenges and ensure the system's robustness in real-world conditions.
Overall, this work represents an important step towards enabling seamless, high-quality wireless services from drone-mounted base stations, with implications for a wide range of applications, from smart cities to disaster response.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An Accurate Beam-Tracking Algorithm with Adaptive Beam Reconstruction via UAV-BSs for Mobile Users
Jing Zhang, Sheng Gao, Xin Feng, Hongwei Yang, Geng Sun
Unmanned aerial vehicles (UAVs) with flexible deployment contribute to enlarging the distance of information transmission to mobile users (MUs) in constrained environment. However, due to the high mobility of both UAVs and MUs, it is challenging to establish an accurate beam towards the target MU with high beam gain in real-time. In this study, UAV base stations (UAV-BSs) consisting of position-known assisted UAVs (A-UAVs) and position-unknown assisted UAVs (U-UAVs) are employed to transmit data to MUs. Specifically, a bi-directional angle-aware beam tracking with adaptive beam reconstruction (BAB-AR) algorithm is proposed to construct an optimal beam that can quickly adapt the movement of the target MU. First, the angle-aware beam tracking is realized within the UAVBSs using a proposed global dynamic crow search algorithm without historical trajectory. Furthermore, the Gaussian process regression model is trained by A-UAVs to predict the azimuth and elevation angles of MUs. Meanwhile, we focus on the beam width and design a time interval adjustment mechanism for adaptive beam reconstruction to track high-speed MUs. Finally, the performance of the BAB-AR algorithm is compared with that of benchmark algorithms, and simulate results verifies that the BAB-AR algorithm can construct an accurate beam capable of covering high-speed MUs with the half power beam width in a timely manner.
Read more4/23/2024
🚀
0
Codebook-Based Beam Tracking for Conformal ArrayEnabled UAV MmWave Networks
Jinglin Zhang, Wenjun Xu, Hui Gao, Miao Pan, Zhu Han, Ping Zhang
Millimeter wave (mmWave) communications can potentially meet the high data-rate requirements of unmanned aerial vehicle (UAV) networks. However, as the prerequisite of mmWave communications, the narrow directional beam tracking is very challenging because of the three-dimensional (3D) mobility and attitude variation of UAVs. Aiming to address the beam tracking difficulties, we propose to integrate the conformal array (CA) with the surface of each UAV, which enables the full spatial coverage and the agile beam tracking in highly dynamic UAV mmWave networks. More specifically, the key contributions of our work are three-fold. 1) A new mmWave beam tracking framework is established for the CA-enabled UAV mmWave network. 2) A specialized hierarchical codebook is constructed to drive the directional radiating element (DRE)-covered cylindrical conformal array (CCA), which contains both the angular beam pattern and the subarray pattern to fully utilize the potential of the CA. 3) A codebook-based multiuser beam tracking scheme is proposed, where the Gaussian process machine learning enabled UAV position/attitude predication is developed to improve the beam tracking efficiency in conjunction with the tracking-error aware adaptive beamwidth control. Simulation results validate the effectiveness of the proposed codebook-based beam tracking scheme in the CA-enabled UAV mmWave network, and demonstrate the advantages of CA over the conventional planner array in terms of spectrum efficiency and outage probability in the highly dynamic scenarios.
Read more4/9/2024

0
UAV-enabled Collaborative Beamforming via Multi-Agent Deep Reinforcement Learning
Saichao Liu, Geng Sun, Jiahui Li, Shuang Liang, Qingqing Wu, Pengfei Wang, Dusit Niyato
In this paper, we investigate an unmanned aerial vehicle (UAV)-assistant air-to-ground communication system, where multiple UAVs form a UAV-enabled virtual antenna array (UVAA) to communicate with remote base stations by utilizing collaborative beamforming. To improve the work efficiency of the UVAA, we formulate a UAV-enabled collaborative beamforming multi-objective optimization problem (UCBMOP) to simultaneously maximize the transmission rate of the UVAA and minimize the energy consumption of all UAVs by optimizing the positions and excitation current weights of all UAVs. This problem is challenging because these two optimization objectives conflict with each other, and they are non-concave to the optimization variables. Moreover, the system is dynamic, and the cooperation among UAVs is complex, making traditional methods take much time to compute the optimization solution for a single task. In addition, as the task changes, the previously obtained solution will become obsolete and invalid. To handle these issues, we leverage the multi-agent deep reinforcement learning (MADRL) to address the UCBMOP. Specifically, we use the heterogeneous-agent trust region policy optimization (HATRPO) as the basic framework, and then propose an improved HATRPO algorithm, namely HATRPO-UCB, where three techniques are introduced to enhance the performance. Simulation results demonstrate that the proposed algorithm can learn a better strategy compared with other methods. Moreover, extensive experiments also demonstrate the effectiveness of the proposed techniques.
Read more4/12/2024
0
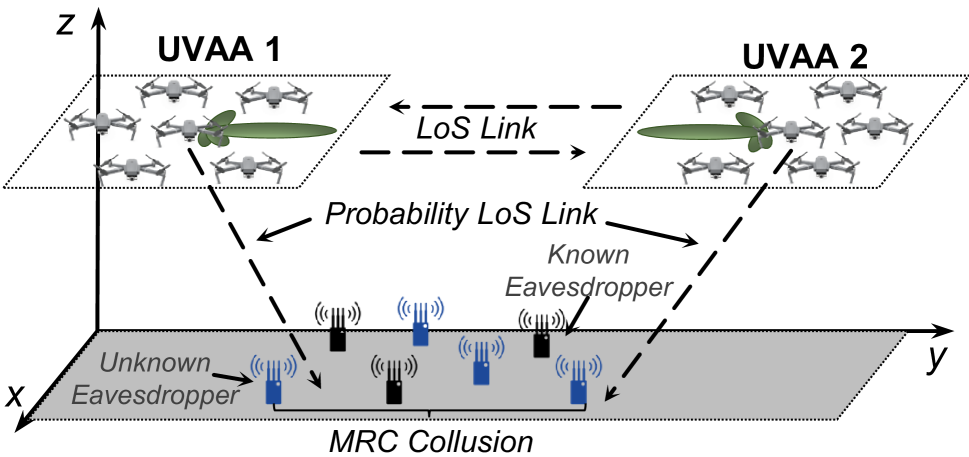
Two-Way Aerial Secure Communications via Distributed Collaborative Beamforming under Eavesdropper Collusion
Jiahui Li, Geng Sun, Qingqing Wu, Shuang Liang, Pengfei Wang, Dusit Niyato
Unmanned aerial vehicles (UAVs)-enabled aerial communication provides a flexible, reliable, and cost-effective solution for a range of wireless applications. However, due to the high line-of-sight (LoS) probability, aerial communications between UAVs are vulnerable to eavesdropping attacks, particularly when multiple eavesdroppers collude. In this work, we aim to introduce distributed collaborative beamforming (DCB) into UAV swarms and handle the eavesdropper collusion by controlling the corresponding signal distributions. Specifically, we consider a two-way DCB-enabled aerial communication between two UAV swarms and construct these swarms as two UAV virtual antenna arrays. Then, we minimize the two-way known secrecy capacity and the maximum sidelobe level to avoid information leakage from the known and unknown eavesdroppers, respectively. Simultaneously, we also minimize the energy consumption of UAVs for constructing virtual antenna arrays. Due to the conflicting relationships between secure performance and energy efficiency, we consider these objectives as a multi-objective optimization problem. Following this, we propose an enhanced multi-objective swarm intelligence algorithm via the characterized properties of the problem. Simulation results show that our proposed algorithm can obtain a set of informative solutions and outperform other state-of-the-art baseline algorithms. Experimental tests demonstrate that our method can be deployed in limited computing power platforms of UAVs and is beneficial for saving computational resources.
Read more4/12/2024