ActiveRIR: Active Audio-Visual Exploration for Acoustic Environment Modeling

0

Sign in to get full access
Overview
- The paper presents ActiveRIR, a novel approach for actively exploring and modeling acoustic environments using audio-visual data.
- The key idea is to use a mobile agent that can actively explore a space, capture audio-visual data, and then use this data to build an accurate model of the room's acoustic properties.
- This approach aims to improve upon existing techniques for acoustic environment modeling, which often rely on static or manually collected data.
Plain English Explanation
ActiveRIR is a new way to model the acoustic properties of a room or space. Traditionally, this has been done by manually collecting audio and visual data, which can be time-consuming and may not capture all the important details.
With ActiveRIR, a mobile agent - like a robot or drone - is used to actively explore the space and gather audio-visual data. This allows the system to capture a more comprehensive understanding of the room's acoustics, such as how sound waves bounce off surfaces and how the physical layout of the space affects sound.
The key advantage of this approach is that it can provide a more accurate and detailed model of the acoustic environment, which could be useful for applications like audio simulation, sound source localization, or smart scene description. By actively exploring the space, the system can gain a deeper understanding of how sound behaves in that particular environment.
Technical Explanation
The ActiveRIR system uses a mobile agent equipped with microphones and cameras to actively explore an acoustic environment. As the agent moves through the space, it captures audio and visual data, which is then used to build a model of the room's acoustic properties.
The key components of the ActiveRIR system include:
- Mobile Agent: A robot or drone that can navigate the space and collect audio-visual data.
- Audio-Visual Sensing: Microphones and cameras on the mobile agent to capture sound and visual information.
- Acoustic Environment Modeling: Algorithms that use the collected data to build a detailed model of the room's acoustic properties, such as how sound waves reflect off surfaces and how the physical layout affects sound propagation.
The system operates in an active, exploratory manner, with the mobile agent strategically navigating the space to gather the most informative audio-visual data. This is in contrast to traditional approaches that rely on static or manually collected data, which may not capture the full complexity of the acoustic environment.
The researchers evaluated ActiveRIR in a series of experiments, demonstrating its ability to accurately model the acoustic properties of various indoor spaces. The results suggest that this active, audio-visual exploration approach can provide significant improvements over existing techniques for acoustic environment modeling.
Critical Analysis
The paper presents a novel and promising approach for acoustic environment modeling, but it also acknowledges several limitations and areas for further research:
- The current system relies on a mobile agent with specialized audio-visual sensing equipment, which may not be practical or cost-effective for all applications. Exploring more accessible sensor configurations could broaden the accessibility of this technology.
- The paper does not fully address the potential challenges of navigating complex indoor environments, such as obstacles, occlusions, and dynamic changes. Enhancing the robustness and adaptability of the mobile agent's exploration strategy could be an important area for future work.
- While the experiments demonstrate the effectiveness of ActiveRIR in controlled settings, further research is needed to understand its performance in real-world, noisy environments with multiple sound sources and varying acoustic properties.
Overall, the ActiveRIR approach represents an interesting advance in acoustic environment modeling, with potential applications in areas like virtual acoustics, smart home systems, and robotic scene understanding. Continued research to address the identified limitations and explore new applications could further strengthen the impact of this work.
Conclusion
The ActiveRIR system presents a novel approach for actively exploring and modeling acoustic environments using audio-visual data. By employing a mobile agent to capture comprehensive data about a space, the system can build detailed models of the room's acoustic properties, which could have important applications in areas like virtual acoustics, smart home systems, and robotic scene understanding.
While the paper highlights several promising results, it also acknowledges areas for further research, such as improving the accessibility and robustness of the system. Continued advancements in this direction could lead to significant improvements in our ability to understand and manipulate the acoustic properties of real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ActiveRIR: Active Audio-Visual Exploration for Acoustic Environment Modeling
Arjun Somayazulu, Sagnik Majumder, Changan Chen, Kristen Grauman
An environment acoustic model represents how sound is transformed by the physical characteristics of an indoor environment, for any given source/receiver location. Traditional methods for constructing acoustic models involve expensive and time-consuming collection of large quantities of acoustic data at dense spatial locations in the space, or rely on privileged knowledge of scene geometry to intelligently select acoustic data sampling locations. We propose active acoustic sampling, a new task for efficiently building an environment acoustic model of an unmapped environment in which a mobile agent equipped with visual and acoustic sensors jointly constructs the environment acoustic model and the occupancy map on-the-fly. We introduce ActiveRIR, a reinforcement learning (RL) policy that leverages information from audio-visual sensor streams to guide agent navigation and determine optimal acoustic data sampling positions, yielding a high quality acoustic model of the environment from a minimal set of acoustic samples. We train our policy with a novel RL reward based on information gain in the environment acoustic model. Evaluating on diverse unseen indoor environments from a state-of-the-art acoustic simulation platform, ActiveRIR outperforms an array of methods--both traditional navigation agents based on spatial novelty and visual exploration as well as existing state-of-the-art methods.
Read more4/26/2024
0
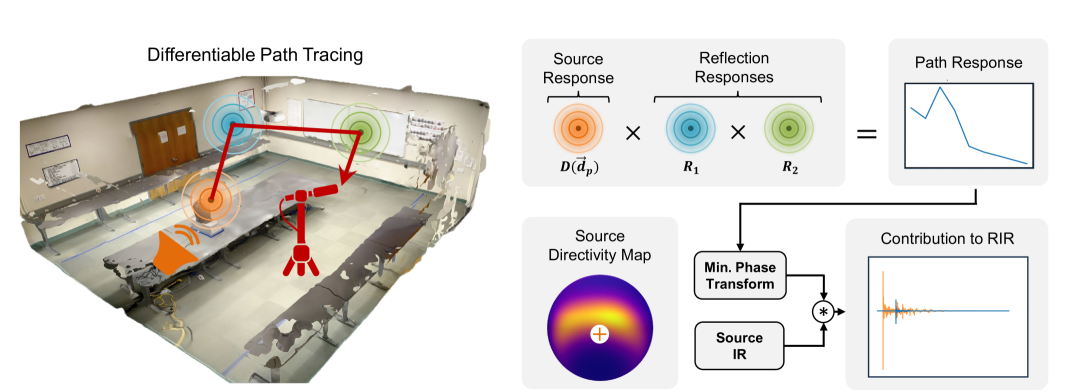
Hearing Anything Anywhere
Mason Wang, Ryosuke Sawata, Samuel Clarke, Ruohan Gao, Shangzhe Wu, Jiajun Wu
Recent years have seen immense progress in 3D computer vision and computer graphics, with emerging tools that can virtualize real-world 3D environments for numerous Mixed Reality (XR) applications. However, alongside immersive visual experiences, immersive auditory experiences are equally vital to our holistic perception of an environment. In this paper, we aim to reconstruct the spatial acoustic characteristics of an arbitrary environment given only a sparse set of (roughly 12) room impulse response (RIR) recordings and a planar reconstruction of the scene, a setup that is easily achievable by ordinary users. To this end, we introduce DiffRIR, a differentiable RIR rendering framework with interpretable parametric models of salient acoustic features of the scene, including sound source directivity and surface reflectivity. This allows us to synthesize novel auditory experiences through the space with any source audio. To evaluate our method, we collect a dataset of RIR recordings and music in four diverse, real environments. We show that our model outperforms state-ofthe-art baselines on rendering monaural and binaural RIRs and music at unseen locations, and learns physically interpretable parameters characterizing acoustic properties of the sound source and surfaces in the scene.
Read more6/12/2024
⚙️
0
Efficient learning-based sound propagation for virtual and real-world audio processing applications
Anton Jeran Ratnarajah
Sound propagation is the process by which sound energy travels through a medium, such as air, to the surrounding environment as sound waves. The room impulse response (RIR) describes this process and is influenced by the positions of the source and listener, the room's geometry, and its materials. Physics-based acoustic simulators have been used for decades to compute accurate RIRs for specific acoustic environments. However, we have encountered limitations with existing acoustic simulators. To address these limitations, we propose three novel solutions. First, we introduce a learning-based RIR generator that is two orders of magnitude faster than an interactive ray-tracing simulator. Our approach can be trained to input both statistical and traditional parameters directly, and it can generate both monaural and binaural RIRs for both reconstructed and synthetic 3D scenes. Our generated RIRs outperform interactive ray-tracing simulators in speech-processing applications, including ASR, Speech Enhancement, and Speech Separation. Secondly, we propose estimating RIRs from reverberant speech signals and visual cues without a 3D representation of the environment. By estimating RIRs from reverberant speech, we can augment training data to match test data, improving the word error rate of the ASR system. Our estimated RIRs achieve a 6.9% improvement over previous learning-based RIR estimators in far-field ASR tasks. We demonstrate that our audio-visual RIR estimator aids tasks like visual acoustic matching, novel-view acoustic synthesis, and voice dubbing, validated through perceptual evaluation. Finally, we introduce IR-GAN to augment accurate RIRs using real RIRs. IR-GAN parametrically controls acoustic parameters learned from real RIRs to generate new RIRs that imitate different acoustic environments, outperforming Ray-tracing simulators on the far-field ASR benchmark by 8.95%.
Read more9/25/2024
🖼️
0
Novel-View Acoustic Synthesis from 3D Reconstructed Rooms
Byeongjoo Ahn, Karren Yang, Brian Hamilton, Jonathan Sheaffer, Anurag Ranjan, Miguel Sarabia, Oncel Tuzel, Jen-Hao Rick Chang
We investigate the benefit of combining blind audio recordings with 3D scene information for novel-view acoustic synthesis. Given audio recordings from 2-4 microphones and the 3D geometry and material of a scene containing multiple unknown sound sources, we estimate the sound anywhere in the scene. We identify the main challenges of novel-view acoustic synthesis as sound source localization, separation, and dereverberation. While naively training an end-to-end network fails to produce high-quality results, we show that incorporating room impulse responses (RIRs) derived from 3D reconstructed rooms enables the same network to jointly tackle these tasks. Our method outperforms existing methods designed for the individual tasks, demonstrating its effectiveness at utilizing 3D visual information. In a simulated study on the Matterport3D-NVAS dataset, our model achieves near-perfect accuracy on source localization, a PSNR of 26.44dB and a SDR of 14.23dB for source separation and dereverberation, resulting in a PSNR of 25.55 dB and a SDR of 14.20 dB on novel-view acoustic synthesis. We release our code and model on our project website at https://github.com/apple/ml-nvas3d. Please wear headphones when listening to the results.
Read more8/19/2024