ASDF: Assembly State Detection Utilizing Late Fusion by Integrating 6D Pose Estimation

0
Sign in to get full access
Overview
- This paper presents a novel method called ASDF (Assembly State Detection Utilizing Late Fusion) for detecting the assembly state of objects in a robotic assembly task.
- The method integrates 6D pose estimation to accurately track the position and orientation of objects during the assembly process.
- ASDF uses a late fusion approach to combine information from multiple sensors, including RGB cameras and depth sensors, to improve the robustness and accuracy of assembly state detection.
Plain English Explanation
The paper describes a new system called ASDF that can track the position and orientation of objects during a robotic assembly task. This is important because being able to accurately monitor the state of the assembly process is crucial for ensuring that the final product is assembled correctly.
The ASDF system uses information from multiple cameras and depth sensors to detect the 6D pose (position and orientation) of the objects being assembled. This integrated 6D pose estimation helps the system keep track of where the objects are in 3D space as the assembly progresses.
By combining the data from these different sensors using a "late fusion" approach, the ASDF system is able to more reliably determine the current state of the assembly. This late fusion technique helps the system overcome limitations that any single sensor might have on its own.
The key idea is to use multiple sources of information to build a more complete and accurate picture of the assembly process. This allows the robot to better understand what step of the assembly it is currently on and take the appropriate actions to complete the task successfully.
Technical Explanation
The ASDF method uses a two-stage approach to detect the assembly state. First, it employs 6D pose estimation to track the positions and orientations of the objects being assembled. This is done by integrating data from RGB cameras and depth sensors.
In the second stage, ASDF uses a late fusion technique to combine the 6D pose information with other sensor data, such as force/torque measurements and joint angle readings. This late fusion approach allows the system to take advantage of complementary information from multiple modalities to more robustly detect the current assembly state.
The authors evaluate ASDF on a real-world industrial assembly task, demonstrating that it outperforms previous state-of-the-art methods in terms of accuracy and reliability. The system is able to detect anomalies and deviations from the expected assembly process, which is crucial for ensuring the quality of the final product.
Critical Analysis
The paper provides a comprehensive evaluation of the ASDF method, including comparisons to other state-of-the-art techniques. However, the authors do note some limitations of their approach. For example, the system may struggle with particularly complex or occluded assembly scenarios, where the 6D pose estimation becomes more challenging.
Additionally, the paper does not explore the potential integration of ASDF with neural implicit representations or digital twins to further enhance the system's capabilities. Investigating these avenues could be a fruitful direction for future research.
Overall, the ASDF method represents a significant advance in the field of assembly state detection, with the potential to improve the reliability and efficiency of robotic assembly tasks in industrial settings.
Conclusion
The ASDF method presented in this paper offers a novel approach to detecting the assembly state of objects during a robotic assembly process. By integrating 6D pose estimation and a late fusion technique, the system is able to accurately track the position and orientation of objects and robustly determine the current state of the assembly.
The real-world evaluation of ASDF demonstrates its superiority over previous methods, suggesting that it could be a valuable tool for improving the quality and efficiency of industrial assembly tasks. While the paper identifies some limitations, the core ideas behind ASDF represent an important step forward in the field of robotic assembly and manipulation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ASDF: Assembly State Detection Utilizing Late Fusion by Integrating 6D Pose Estimation
Hannah Schieber, Shiyu Li, Niklas Corell, Philipp Beckerle, Julian Kreimeier, Daniel Roth
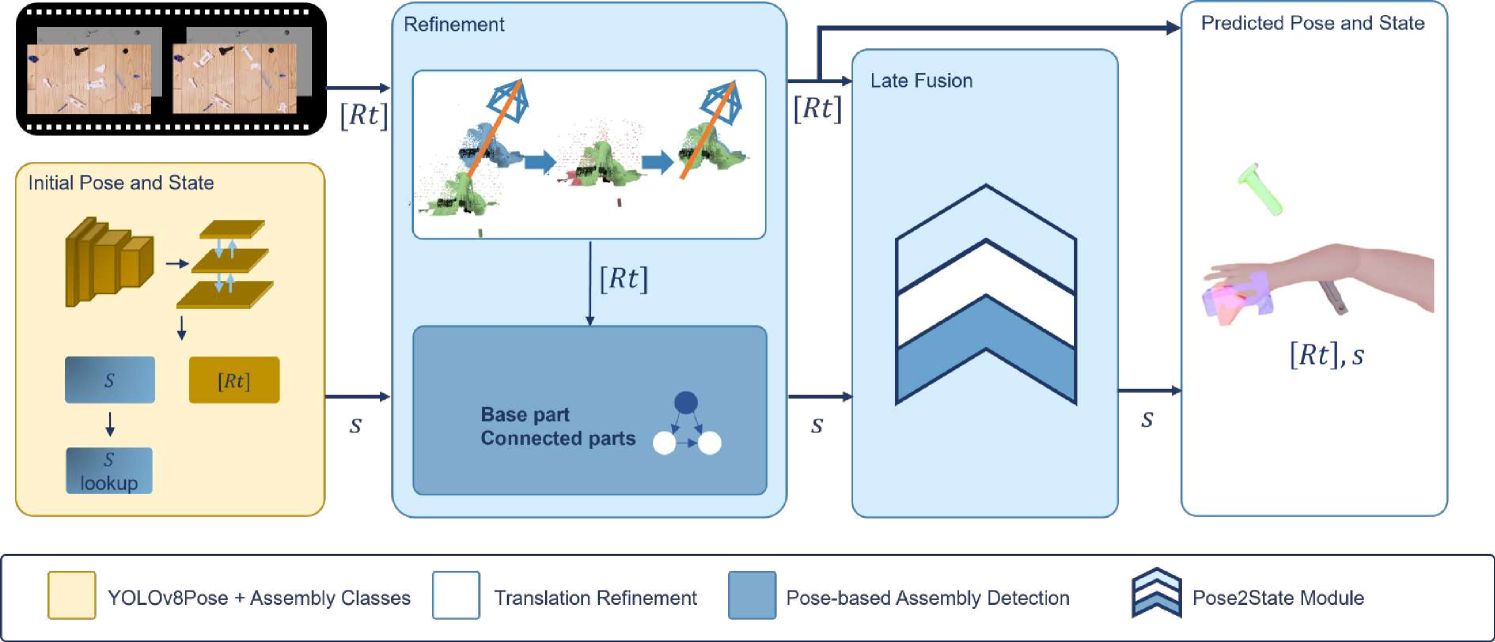
In medical and industrial domains, providing guidance for assembly processes can be critical to ensure efficiency and safety. Errors in assembly can lead to significant consequences such as extended surgery times and prolonged manufacturing or maintenance times in industry. Assembly scenarios can benefit from in-situ augmented reality visualization, i.e., augmentations in close proximity to the target object, to provide guidance, reduce assembly times, and minimize errors. In order to enable in-situ visualization, 6D pose estimation can be leveraged to identify the correct location for an augmentation. Existing 6D pose estimation techniques primarily focus on individual objects and static captures. However, assembly scenarios have various dynamics, including occlusion during assembly and dynamics in the appearance of assembly objects. Existing work focus either on object detection combined with state detection, or focus purely on the pose estimation. To address the challenges of 6D pose estimation in combination with assembly state detection, our approach ASDF builds upon the strengths of YOLOv8, a real-time capable object detection framework. We extend this framework, refine the object pose, and fuse pose knowledge with network-detected pose information. Utilizing our late fusion in our Pose2State module results in refined 6D pose estimation and assembly state detection. By combining both pose and state information, our Pose2State module predicts the final assembly state with precision. The evaluation of our ASDF dataset shows that our Pose2State module leads to an improved assembly state detection and that the improvement of the assembly state further leads to a more robust 6D pose estimation. Moreover, on the GBOT dataset, we outperform the pure deep learning-based network and even outperform the hybrid and pure tracking-based approaches.
Read more8/12/2024

0
Find the Assembly Mistakes: Error Segmentation for Industrial Applications
Dan Lehman, Tim J. Schoonbeek, Shao-Hsuan Hung, Jacek Kustra, Peter H. N. de With, Fons van der Sommen
Recognizing errors in assembly and maintenance procedures is valuable for industrial applications, since it can increase worker efficiency and prevent unplanned down-time. Although assembly state recognition is gaining attention, none of the current works investigate assembly error localization. Therefore, we propose StateDiffNet, which localizes assembly errors based on detecting the differences between a (correct) intended assembly state and a test image from a similar viewpoint. StateDiffNet is trained on synthetically generated image pairs, providing full control over the type of meaningful change that should be detected. The proposed approach is the first to correctly localize assembly errors taken from real ego-centric video data for both states and error types that are never presented during training. Furthermore, the deployment of change detection to this industrial application provides valuable insights and considerations into the mechanisms of state-of-the-art change detection algorithms. The code and data generation pipeline are publicly available at: https://timschoonbeek.github.io/error_seg.
Read more8/26/2024
📊
0
Industrial Application of 6D Pose Estimation for Robotic Manipulation in Automotive Internal Logistics
Philipp Quentin, Dino Knoll, Daniel Goehring
Despite the advances in robotics a large proportion of the of parts handling tasks in the automotive industry's internal logistics are not automated but still performed by humans. A key component to competitively automate these processes is a 6D pose estimation that can handle a large number of different parts, is adaptable to new parts with little manual effort, and is sufficiently accurate and robust with respect to industry requirements. In this context, the question arises as to the current status quo with respect to these measures. To address this we built a representative 6D pose estimation pipeline with state-of-the-art components from economically scalable real to synthetic data generation to pose estimators and evaluated it on automotive parts with regards to a realistic sequencing process. We found that using the data generation approaches, the performance of the trained 6D pose estimators are promising, but do not meet industry requirements. We reveal that the reason for this is the inability of the estimators to provide reliable uncertainties for their poses, rather than the ability of to provide sufficiently accurate poses. In this context we further analyzed how RGB- and RGB-D-based approaches compare against this background and show that they are differently vulnerable to the domain gap induced by synthetic data.
Read more4/10/2024
🛸
0
One Point, One Object: Simultaneous 3D Object Segmentation and 6-DOF Pose Estimation
Hongsen Liu
We propose a single-shot method for simultaneous 3D object segmentation and 6-DOF pose estimation in pure 3D point clouds scenes based on a consensus that emph{one point only belongs to one object}, i.e., each point has the potential power to predict the 6-DOF pose of its corresponding object. Unlike the recently proposed methods of the similar task, which rely on 2D detectors to predict the projection of 3D corners of the 3D bounding boxes and the 6-DOF pose must be estimated by a PnP like spatial transformation method, ours is concise enough not to require additional spatial transformation between different dimensions. Due to the lack of training data for many objects, the recently proposed 2D detection methods try to generate training data by using rendering engine and achieve good results. However, rendering in 3D space along with 6-DOF is relatively difficult. Therefore, we propose an augmented reality technology to generate the training data in semi-virtual reality 3D space. The key component of our method is a multi-task CNN architecture that can simultaneously predicts the 3D object segmentation and 6-DOF pose estimation in pure 3D point clouds. For experimental evaluation, we generate expanded training data for two state-of-the-arts 3D object datasets cite{PLCHF}cite{TLINEMOD} by using Augmented Reality technology (AR). We evaluate our proposed method on the two datasets. The results show that our method can be well generalized into multiple scenarios and provide performance comparable to or better than the state-of-the-arts.
Read more6/7/2024