Advancing Forest Fire Prevention: Deep Reinforcement Learning for Effective Firebreak Placement
2404.08523
0
0
Abstract
Over the past decades, the increase in both frequency and intensity of large-scale wildfires due to climate change has emerged as a significant natural threat. The pressing need to design resilient landscapes capable of withstanding such disasters has become paramount, requiring the development of advanced decision-support tools. Existing methodologies, including Mixed Integer Programming, Stochastic Optimization, and Network Theory, have proven effective but are hindered by computational demands, limiting their applicability. In response to this challenge, we propose using artificial intelligence techniques, specifically Deep Reinforcement Learning, to address the complex problem of firebreak placement in the landscape. We employ value-function based approaches like Deep Q-Learning, Double Deep Q-Learning, and Dueling Double Deep Q-Learning. Utilizing the Cell2Fire fire spread simulator combined with Convolutional Neural Networks, we have successfully implemented a computational agent capable of learning firebreak locations within a forest environment, achieving good results. Furthermore, we incorporate a pre-training loop, initially teaching our agent to mimic a heuristic-based algorithm and observe that it consistently exceeds the performance of these solutions. Our findings underscore the immense potential of Deep Reinforcement Learning for operational research challenges, especially in fire prevention. Our approach demonstrates convergence with highly favorable results in problem instances as large as 40 x 40 cells, marking a significant milestone in applying Reinforcement Learning to this critical issue. To the best of our knowledge, this study represents a pioneering effort in using Reinforcement Learning to address the aforementioned problem, offering promising perspectives in fire prevention and landscape management
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper proposes using deep reinforcement learning (DRL) to optimally place firebreaks in forested areas to prevent the spread of wildfires.
- Firebreaks are strips of land where flammable vegetation has been removed to stop or slow the progress of a wildfire.
- The researchers developed a DRL-based system that can learn to efficiently place firebreaks to minimize the potential damage from wildfires.
Plain English Explanation
Wildfires can be devastating, causing massive destruction to forests, property, and even loss of life. One way to help control the spread of these fires is by creating firebreaks - cleared areas that act as barriers to slow down or stop the fire's progress. This paper explores using a type of artificial intelligence called deep reinforcement learning (DRL) to figure out the best places to put these firebreaks.
The researchers created a DRL system that can "learn" by interacting with a simulated forest environment. The system tries different firebreak placements and sees how effective they are at containing a simulated wildfire. Over time, the system gets better at finding the optimal placement of firebreaks to minimize the potential damage from fires. This is similar to how reinforcement learning is used for things like self-driving cars or game-playing AI.
By using this DRL approach, the researchers believe they can help forest managers and firefighters be more proactive and strategic in their wildfire prevention efforts. Instead of just reacting to fires as they happen, this system could identify the most critical areas to create firebreaks ahead of time, potentially saving lives, property, and valuable natural resources.
Technical Explanation
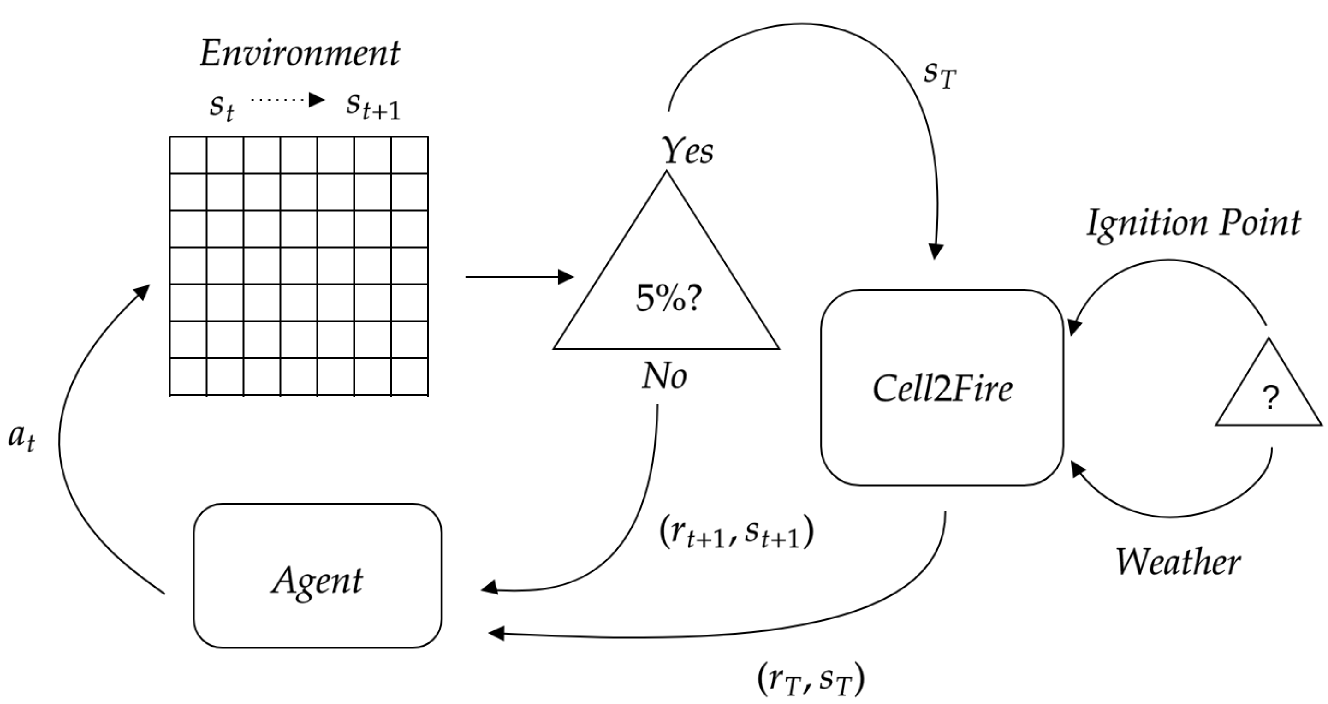
The paper formulates the firebreak placement problem as a Markov Decision Process, where the agent (the DRL system) takes actions to place firebreaks in the environment, and receives rewards based on the effectiveness of those placements in containing a simulated wildfire.
The researchers developed a novel DRL algorithm called Firebreak Placement Deep Q-Network (FBP-DQN) that uses a deep neural network to learn the optimal firebreak placement policy. This network takes in information about the forest environment, such as vegetation density and topography, and outputs a set of actions indicating where to place firebreaks.
The FBP-DQN system was trained and evaluated using a realistic forest fire simulation environment. The results showed that the DRL-based approach significantly outperformed traditional rule-based firebreak placement strategies in terms of minimizing the area burned by wildfires.
Critical Analysis
The paper provides a compelling demonstration of how deep reinforcement learning can be applied to the important problem of wildfire prevention. By automating the placement of firebreaks, the proposed system has the potential to save lives, property, and natural resources.
However, the paper does not address some potential limitations of the approach. For example, the simulation environment used for training and evaluation may not fully capture the complexity and unpredictability of real-world wildfires, which can be influenced by factors like weather, human activity, and unexpected fire behavior. Further research would be needed to validate the effectiveness of the FBP-DQN system in actual forest settings.
Additionally, the paper does not discuss the computational requirements or training time of the FBP-DQN system, which could be important considerations for real-world deployment. There may also be ethical and equity concerns around the use of such AI-based systems for wildfire management, which should be carefully considered.
Overall, this paper represents an important step forward in the application of deep reinforcement learning to the critical problem of wildfire prevention. With further research and refinement, the proposed approach could become a valuable tool for forest managers and firefighters in their efforts to protect communities and natural resources from the devastating impacts of wildfires.
Conclusion
This paper demonstrates the potential of using deep reinforcement learning to optimize the placement of firebreaks in forested areas, a crucial task for preventing the spread of devastating wildfires. By training an AI system to learn the optimal firebreak locations based on simulated fire scenarios, the researchers have developed a promising approach that could help forest managers be more proactive and strategic in their wildfire prevention efforts.
While the paper provides a strong technical foundation, further research is needed to validate the system's effectiveness in real-world forest settings and address potential limitations around computational requirements and ethical considerations. Nonetheless, this work represents an important advancement in the application of AI to the challenge of wildfire management, with significant implications for protecting lives, property, and natural resources.
Related Papers
FPGA Divide-and-Conquer Placement using Deep Reinforcement Learning
Shang Wang, Deepak Ranganatha Sastry Mamillapalli, Tianpei Yang, Matthew E. Taylor
0
0
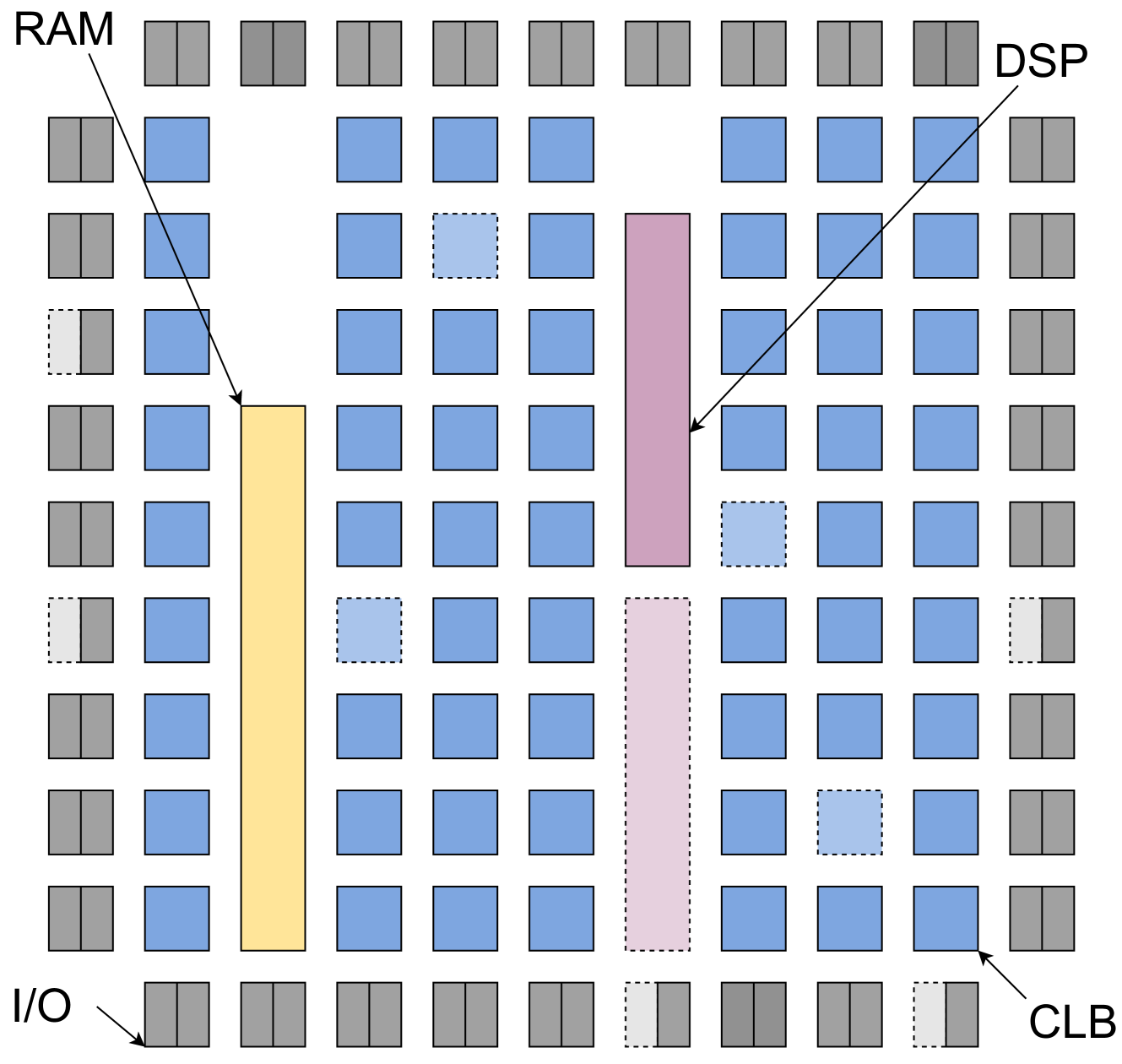
This paper introduces the problem of learning to place logic blocks in Field-Programmable Gate Arrays (FPGAs) and a learning-based method. In contrast to previous search-based placement algorithms, we instead employ Reinforcement Learning (RL) with the goal of minimizing wirelength. In addition to our preliminary learning results, we also evaluated a novel decomposition to address the nature of large search space when placing many blocks on a chipboard. Empirical experiments evaluate the effectiveness of the learning and decomposition paradigms on FPGA placement tasks.
4/23/2024
Model-based deep reinforcement learning for accelerated learning from flow simulations
Andre Weiner, Janis Geise
0
0
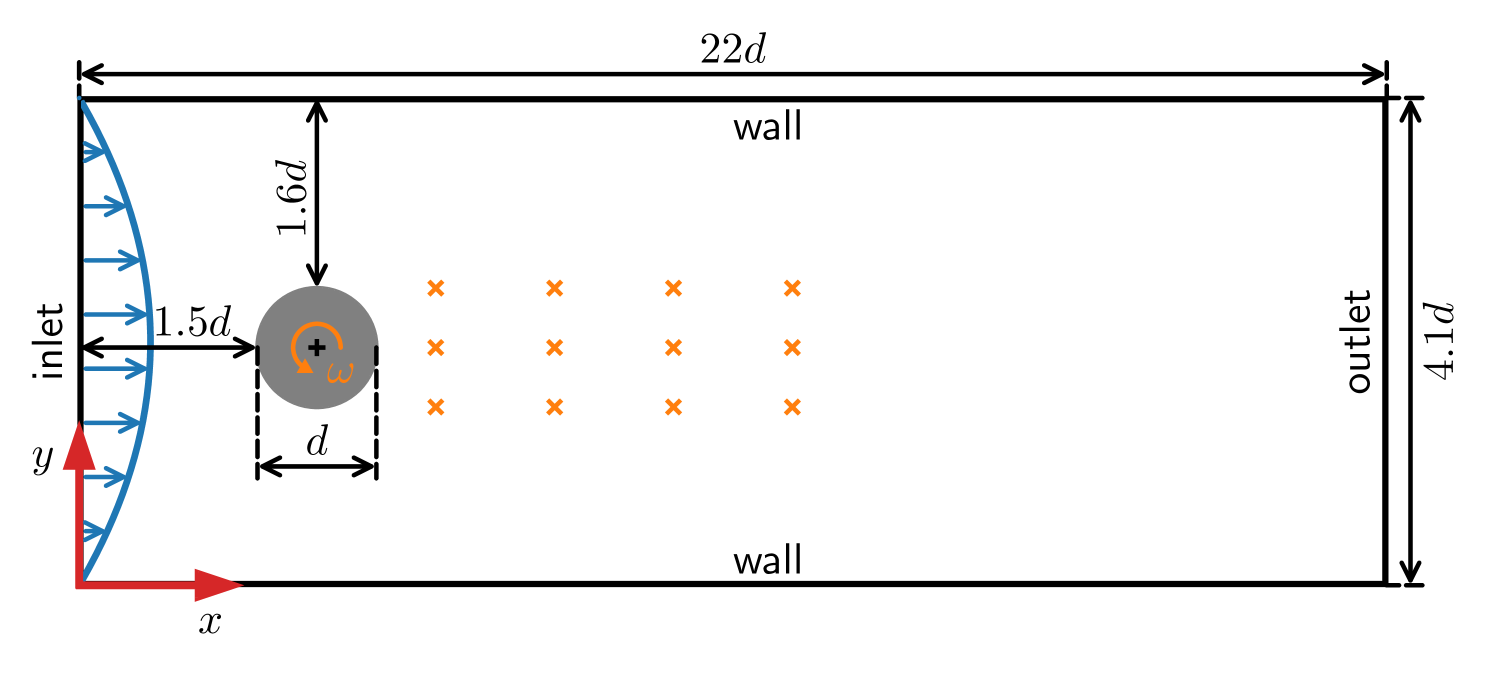
In recent years, deep reinforcement learning has emerged as a technique to solve closed-loop flow control problems. Employing simulation-based environments in reinforcement learning enables a priori end-to-end optimization of the control system, provides a virtual testbed for safety-critical control applications, and allows to gain a deep understanding of the control mechanisms. While reinforcement learning has been applied successfully in a number of rather simple flow control benchmarks, a major bottleneck toward real-world applications is the high computational cost and turnaround time of flow simulations. In this contribution, we demonstrate the benefits of model-based reinforcement learning for flow control applications. Specifically, we optimize the policy by alternating between trajectories sampled from flow simulations and trajectories sampled from an ensemble of environment models. The model-based learning reduces the overall training time by up to $85%$ for the fluidic pinball test case. Even larger savings are expected for more demanding flow simulations.
4/11/2024
Deep Reinforcement Learning for Advanced Longitudinal Control and Collision Avoidance in High-Risk Driving Scenarios
Dianwei Chen, Yaobang Gong, Xianfeng Yang
0
0
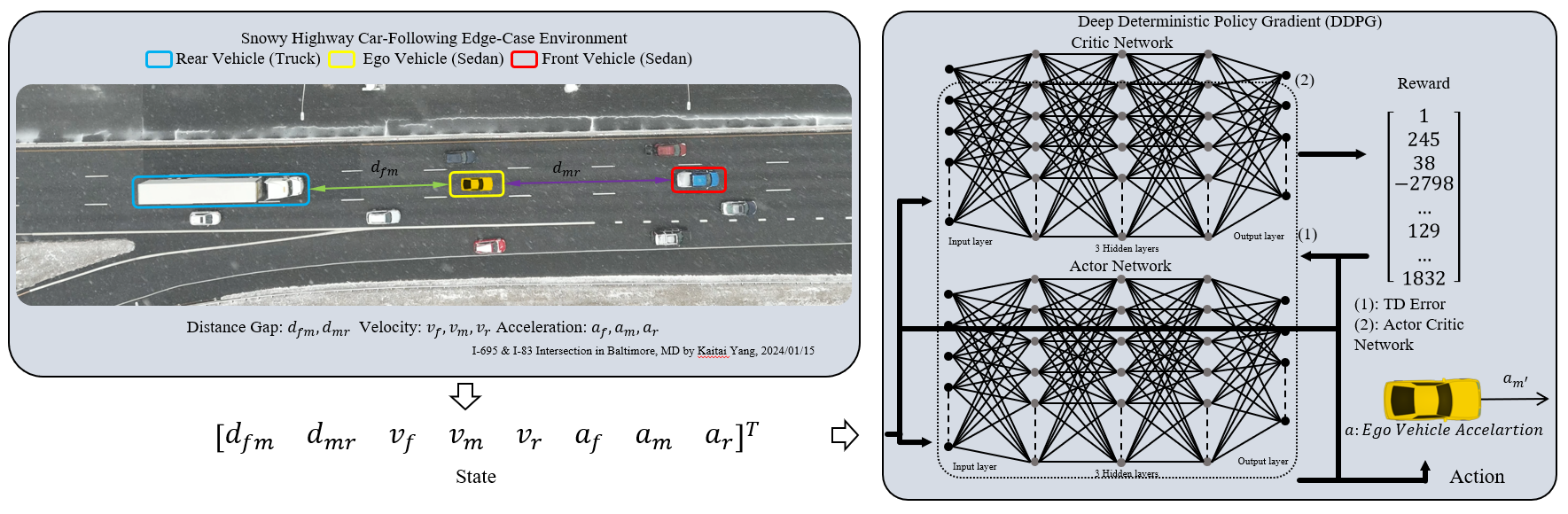
Existing Advanced Driver Assistance Systems primarily focus on the vehicle directly ahead, often overlooking potential risks from following vehicles. This oversight can lead to ineffective handling of high risk situations, such as high speed, closely spaced, multi vehicle scenarios where emergency braking by one vehicle might trigger a pile up collision. To overcome these limitations, this study introduces a novel deep reinforcement learning based algorithm for longitudinal control and collision avoidance. This proposed algorithm effectively considers the behavior of both leading and following vehicles. Its implementation in simulated high risk scenarios, which involve emergency braking in dense traffic where traditional systems typically fail, has demonstrated the algorithm ability to prevent potential pile up collisions, including those involving heavy duty vehicles.
5/1/2024
Multi-AGV Path Planning Method via Reinforcement Learning and Particle Filters
Shao Shuo
0
0
The Reinforcement Learning (RL) algorithm, renowned for its robust learning capability and search stability, has garnered significant attention and found extensive application in Automated Guided Vehicle (AGV) path planning. However, RL planning algorithms encounter challenges stemming from the substantial variance of neural networks caused by environmental instability and significant fluctuations in system structure. These challenges manifest in slow convergence speed and low learning efficiency. To tackle this issue, this paper presents the Particle Filter-Double Deep Q-Network (PF-DDQN) approach, which incorporates the Particle Filter (PF) into multi-AGV reinforcement learning path planning. The PF-DDQN method leverages the imprecise weight values of the network as state values to formulate the state space equation. Through the iterative fusion process of neural networks and particle filters, the DDQN model is optimized to acquire the optimal true weight values, thus enhancing the algorithm's efficiency. The proposed method's effectiveness and superiority are validated through numerical simulations. Overall, the simulation results demonstrate that the proposed algorithm surpasses the traditional DDQN algorithm in terms of path planning superiority and training time indicators by 92.62% and 76.88%, respectively. In conclusion, the PF-DDQN method addresses the challenges encountered by RL planning algorithms in AGV path planning. By integrating the Particle Filter and optimizing the DDQN model, the proposed method achieves enhanced efficiency and outperforms the traditional DDQN algorithm in terms of path planning superiority and training time indicators.
4/10/2024