Hierarchical Path-planning from Speech Instructions with Spatial Concept-based Topometric Semantic Mapping

0
🗣️
Sign in to get full access
Overview
- Robots can assist people in their daily activities, especially those without specialized knowledge
- Key capability is navigating to destinations based on speech instructions
- Shortest path is not always the best, so robots should accommodate waypoint specifications flexibly
- Robots require real-time inference capabilities
Plain English Explanation
Autonomous mobile robots can be very helpful for people in their everyday lives, especially those who may not be tech-savvy. A crucial capability for these robots is the ability to navigate to destinations based on spoken instructions from users. While robots could take the most direct route to a goal, sometimes a slightly longer path that passes certain "waypoints" specified by the user may be preferable. These robots also need to be able to quickly process information and make decisions in real-time as they move around.
This research aimed to develop a robot system that can understand a user's speech commands, including waypoint specifications, and plan an efficient path to the desired destination. The approach, called Spatial Concept-based Topometric Semantic Mapping for Hierarchical Path Planning (SpCoTMHP), uses a multi-level map representation and a probabilistic inference algorithm to quickly find a good route, even if it involves a slight detour. This could be useful for tasks like guiding a robot through a home environment to reach a specific room via a preferred path.
Technical Explanation
The key innovation of this research is the SpCoTMHP approach, which integrates a hierarchical spatial representation using a topometric semantic map with a path planning algorithm that can incorporate spoken waypoint instructions from users.
The topometric semantic map represents the environment at multiple levels of abstraction, from low-level metric details to higher-level conceptual "places." This allows the robot to reason about paths in a more flexible, human-like way beyond just the shortest distance.
The path planning is formulated as a probabilistic inference problem, where the robot infers the most likely path given the user's speech commands. This enables efficient, real-time navigation while accommodating waypoint requests.
The researchers conducted experiments in both simulated home environments and a real-world lab setting using different robot platforms. The results showed that the SpCoTMHP approach outperformed a baseline hierarchical path planning method, achieving higher success rates in reaching the goal while passing through the specified waypoints. Additionally, the computation time was significantly faster with SpCoTMHP.
Critical Analysis
The paper presents a compelling approach for enabling robots to navigate flexibly based on natural language instructions. The integration of a hierarchical spatial representation and probabilistic inference-based path planning is a novel contribution.
However, the experiments were limited to relatively simple indoor environments. Further research would be needed to evaluate the scalability and robustness of the system in more complex, real-world settings. Additionally, the paper does not address potential safety or ethical concerns around autonomous robots operating in close proximity to humans.
Nonetheless, this research represents an important step towards making robots more accessible and useful for a wide range of users, not just those with technical expertise. Continued advancements in this area could lead to more seamless and intuitive interactions between humans and robots in a variety of applications.
Conclusion
This study presents a novel approach called SpCoTMHP that enables autonomous mobile robots to navigate based on natural language instructions from users, including the ability to accommodate specified waypoints along the path. By integrating a hierarchical spatial representation and a probabilistic inference-based path planning algorithm, the system can find efficient routes that may involve slight detours to meet the user's preferences.
The experimental results demonstrate the effectiveness of this approach, showing improved performance over a baseline method. While further research is needed to address the limitations, this work represents an important step towards making robots more accessible and useful for a wide range of users in their daily lives.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🗣️
0
Hierarchical Path-planning from Speech Instructions with Spatial Concept-based Topometric Semantic Mapping
Akira Taniguchi, Shuya Ito, Tadahiro Taniguchi
Assisting individuals in their daily activities through autonomous mobile robots, especially for users without specialized knowledge, is crucial. Specifically, the capability of robots to navigate to destinations based on human speech instructions is essential. While robots can take different paths to the same goal, the shortest path is not always the best. A preferred approach is to accommodate waypoint specifications flexibly, planning an improved alternative path, even with detours. Additionally, robots require real-time inference capabilities. This study aimed to realize a hierarchical spatial representation using a topometric semantic map and path planning with speech instructions, including waypoints. This paper presents Spatial Concept-based Topometric Semantic Mapping for Hierarchical Path Planning (SpCoTMHP), integrating place connectivity. This approach offers a novel integrated probabilistic generative model and fast approximate inference across hierarchy levels. A formulation based on control as probabilistic inference theoretically supports the proposed path planning algorithm. We conducted experiments in home environments using the Toyota Human Support Robot on the SIGVerse simulator and in a lab-office environment with the real robot, Albert. Users issued speech commands specifying the waypoint and goal, such as Go to the bedroom via the corridor. Navigation experiments using speech instructions with a waypoint demonstrated a performance improvement of SpCoTMHP over the baseline hierarchical path planning method with heuristic path costs (HPP-I), in terms of the weighted success rate at which the robot reaches the closest target and passes the correct waypoints, by 0.590. The computation time was significantly accelerated by 7.14 seconds with SpCoTMHP compared to baseline HPP-I in advanced tasks.
Read more6/24/2024

0
Robotic Exploration through Semantic Topometric Mapping
Scott Fredriksson, Akshit Saradagi, George Nikolakopoulos
In this article, we introduce a novel strategy for robotic exploration in unknown environments using a semantic topometric map. As it will be presented, the semantic topometric map is generated by segmenting the grid map of the currently explored parts of the environment into regions, such as intersections, pathways, dead-ends, and unexplored frontiers, which constitute the structural semantics of an environment. The proposed exploration strategy leverages metric information of the frontier, such as distance and angle to the frontier, similar to existing frameworks, with the key difference being the additional utilization of structural semantic information, such as properties of the intersections leading to frontiers. The algorithm for generating semantic topometric mapping utilized by the proposed method is lightweight, resulting in the method's online execution being both rapid and computationally efficient. Moreover, the proposed framework can be applied to both structured and unstructured indoor and outdoor environments, which enhances the versatility of the proposed exploration algorithm. We validate our exploration strategy and demonstrate the utility of structural semantics in exploration in two complex indoor environments by utilizing a Turtlebot3 as the robotic agent. Compared to traditional frontier-based methods, our findings indicate that the proposed approach leads to faster exploration and requires less computation time.
Read more6/27/2024
0
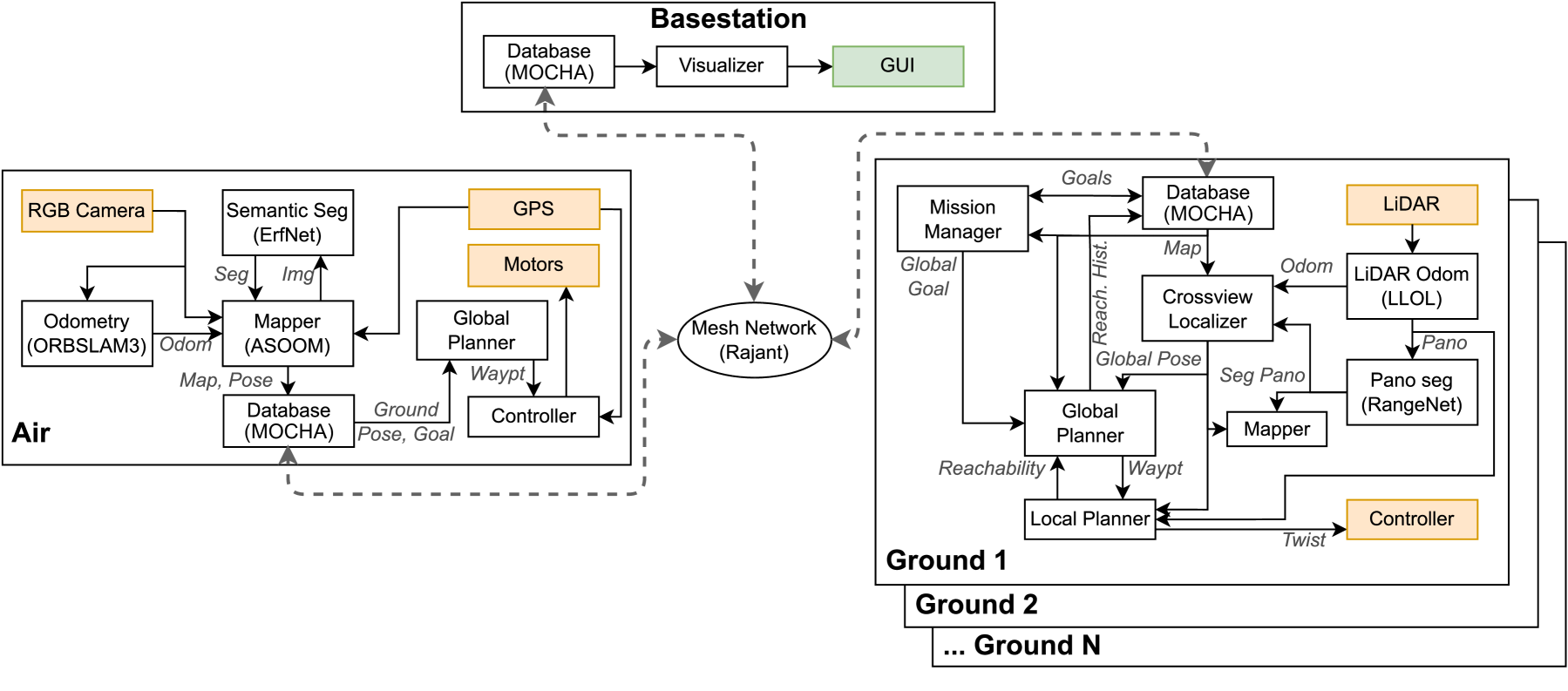
Air-Ground Collaboration with SPOMP: Semantic Panoramic Online Mapping and Planning
Ian D. Miller, Fernando Cladera, Trey Smith, Camillo Jose Taylor, Vijay Kumar
Mapping and navigation have gone hand-in-hand since long before robots existed. Maps are a key form of communication, allowing someone who has never been somewhere to nonetheless navigate that area successfully. In the context of multi-robot systems, the maps and information that flow between robots are necessary for effective collaboration, whether those robots are operating concurrently, sequentially, or completely asynchronously. In this paper, we argue that maps must go beyond encoding purely geometric or visual information to enable increasingly complex autonomy, particularly between robots. We propose a framework for multi-robot autonomy, focusing in particular on air and ground robots operating in outdoor 2.5D environments. We show that semantic maps can enable the specification, planning, and execution of complex collaborative missions, including localization in GPS-denied settings. A distinguishing characteristic of this work is that we strongly emphasize field experiments and testing, and by doing so demonstrate that these ideas can work at scale in the real world. We also perform extensive simulation experiments to validate our ideas at even larger scales. We believe these experiments and the experimental results constitute a significant step forward toward advancing the state-of-the-art of large-scale, collaborative multi-robot systems operating with real communication, navigation, and perception constraints.
Read more7/16/2024

0
NSP: A Neuro-Symbolic Natural Language Navigational Planner
William English, Dominic Simon, Sumit Jha, Rickard Ewetz
Path planners that can interpret free-form natural language instructions hold promise to automate a wide range of robotics applications. These planners simplify user interactions and enable intuitive control over complex semi-autonomous systems. While existing symbolic approaches offer guarantees on the correctness and efficiency, they struggle to parse free-form natural language inputs. Conversely, neural approaches based on pre-trained Large Language Models (LLMs) can manage natural language inputs but lack performance guarantees. In this paper, we propose a neuro-symbolic framework for path planning from natural language inputs called NSP. The framework leverages the neural reasoning abilities of LLMs to i) craft symbolic representations of the environment and ii) a symbolic path planning algorithm. Next, a solution to the path planning problem is obtained by executing the algorithm on the environment representation. The framework uses a feedback loop from the symbolic execution environment to the neural generation process to self-correct syntax errors and satisfy execution time constraints. We evaluate our neuro-symbolic approach using a benchmark suite with 1500 path-planning problems. The experimental evaluation shows that our neuro-symbolic approach produces 90.1% valid paths that are on average 19-77% shorter than state-of-the-art neural approaches.
Read more9/17/2024