Challenges and Opportunities for Large-Scale Exploration with Air-Ground Teams using Semantics

0

Sign in to get full access
Overview
- This paper explores the challenges and opportunities of large-scale exploration using air-ground teams and semantic information.
- It investigates how drones and ground robots can work together effectively to map and understand complex environments.
- The research builds on recent advancements in spatial-assisted human-drone collaborative navigation, automated real-time 3D inspection, and embodied agents for efficient exploration.
Plain English Explanation
This paper looks at how drones and ground robots can work together to explore and map large, complex environments. The key idea is to have the drones fly above and get a bird's eye view, while the ground robots explore the details below. By combining the information from both the air and the ground, the researchers believe they can build a more complete and accurate understanding of the environment.
The paper builds on previous work that has looked at how humans and drones can collaborate on navigation tasks, how robots can automatically inspect 3D environments, and how embodied AI agents can efficiently explore and describe their surroundings. The researchers are taking these ideas a step further by focusing on large-scale, long-term exploration using a team of air and ground robots.
Technical Explanation
The paper proposes a framework for coordinating air-ground exploration teams that leverage semantic information to build comprehensive maps of complex environments. The key components include:
-
Multi-Agent Coordination: Algorithms for managing the flow of information and planning the movements of both the aerial and ground-based robots to maximize coverage and efficiency.
-
Semantic Mapping: Techniques for fusing sensor data from the drones and ground robots to construct rich, semantically-annotated maps of the environment.
-
Long-Term Autonomy: Strategies for maintaining the air-ground teams over extended periods of time, including battery management, task allocation, and adaptation to changes in the environment.
The researchers tested their approach through a series of simulations and real-world experiments, demonstrating the potential for air-ground teams to outperform single-agent systems in terms of exploration speed, map accuracy, and resilience to challenges.
Critical Analysis
The paper makes a compelling case for the value of air-ground exploration teams, and the authors have done a thorough job of addressing many of the key technical challenges. However, some potential limitations and areas for further research are worth noting:
-
The experiments were conducted in relatively controlled environments, and it's unclear how well the approach would scale to truly large-scale, unstructured environments like wilderness areas or disaster zones. Further testing in more diverse and unpredictable settings would be valuable.
-
The paper doesn't delve deeply into the challenges of long-term autonomy, such as dealing with sensor degradation, unexpected obstacles, or changes in the environment over time. Exploring these issues in more detail could strengthen the case for the proposed approach.
-
While the semantic mapping capabilities are impressive, the paper doesn't address how the resulting maps and annotations could be used by humans or other robotic systems for higher-level tasks like planning, decision-making, or situation awareness. Exploring these application-level benefits could broaden the impact of the research.
Overall, this paper represents an important step forward in the development of effective air-ground exploration systems, and the authors have identified several promising directions for future work to build on these foundations.
Conclusion
This paper presents a novel framework for coordinating air-ground teams of robots to map and explore large, complex environments. By combining the unique capabilities of aerial and ground-based platforms, and leveraging semantic information, the researchers have demonstrated the potential to create more comprehensive and resilient exploration systems.
While the current work has some limitations, the insights and technical advances described in the paper represent a significant contribution to the field of long-term robotics in the wild and high-level semantic mapping of indoor environments. As the technology continues to evolve, we can expect to see increasingly capable and versatile exploration systems that can tackle a wide range of real-world challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Challenges and Opportunities for Large-Scale Exploration with Air-Ground Teams using Semantics
Fernando Cladera, Ian D. Miller, Zachary Ravichandran, Varun Murali, Jason Hughes, M. Ani Hsieh, C. J. Taylor, Vijay Kumar
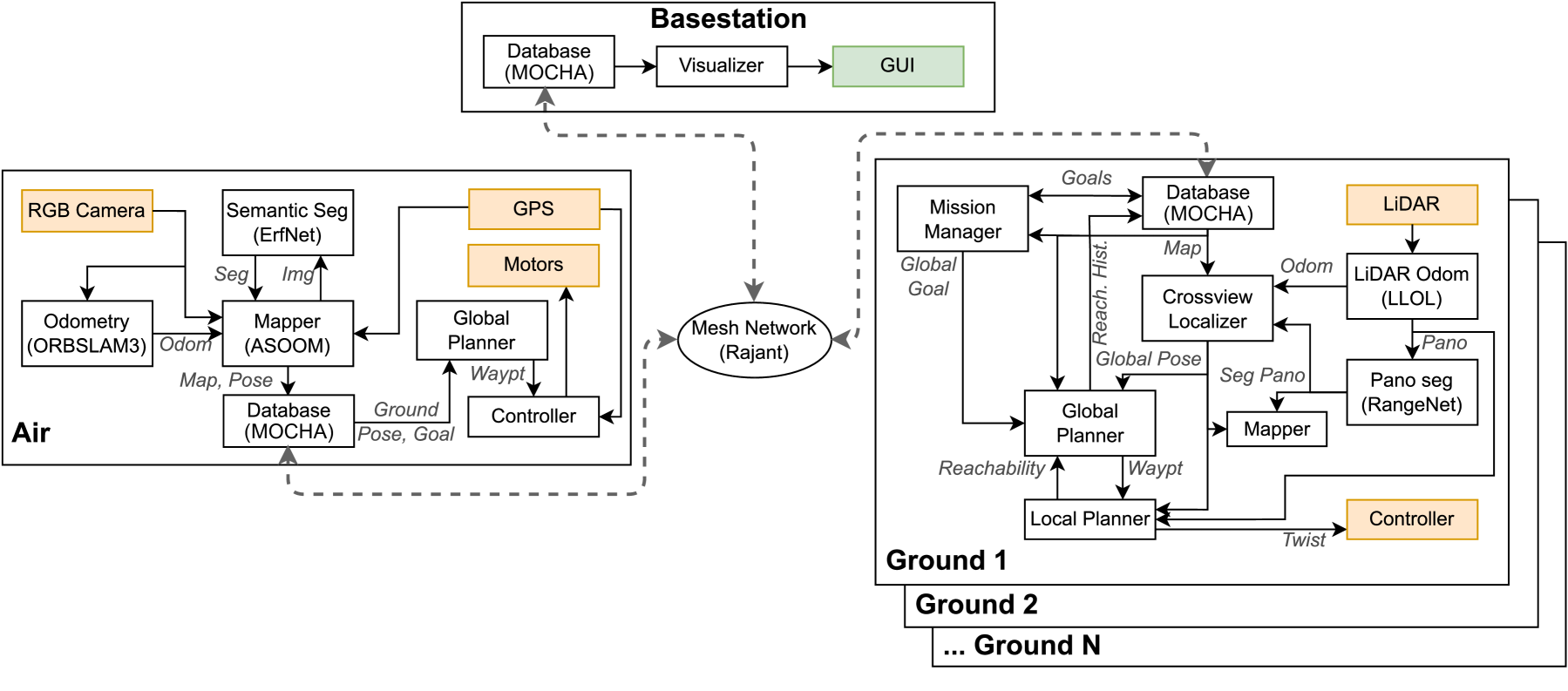
One common and desirable application of robots is exploring potentially hazardous and unstructured environments. Air-ground collaboration offers a synergistic approach to addressing such exploration challenges. In this paper, we demonstrate a system for large-scale exploration using a team of aerial and ground robots. Our system uses semantics as lingua franca, and relies on fully opportunistic communications. We highlight the unique challenges from this approach, explain our system architecture and showcase lessons learned during our experiments. All our code is open-source, encouraging researchers to use it and build upon.
Read more5/14/2024
0
Air-Ground Collaboration with SPOMP: Semantic Panoramic Online Mapping and Planning
Ian D. Miller, Fernando Cladera, Trey Smith, Camillo Jose Taylor, Vijay Kumar
Mapping and navigation have gone hand-in-hand since long before robots existed. Maps are a key form of communication, allowing someone who has never been somewhere to nonetheless navigate that area successfully. In the context of multi-robot systems, the maps and information that flow between robots are necessary for effective collaboration, whether those robots are operating concurrently, sequentially, or completely asynchronously. In this paper, we argue that maps must go beyond encoding purely geometric or visual information to enable increasingly complex autonomy, particularly between robots. We propose a framework for multi-robot autonomy, focusing in particular on air and ground robots operating in outdoor 2.5D environments. We show that semantic maps can enable the specification, planning, and execution of complex collaborative missions, including localization in GPS-denied settings. A distinguishing characteristic of this work is that we strongly emphasize field experiments and testing, and by doing so demonstrate that these ideas can work at scale in the real world. We also perform extensive simulation experiments to validate our ideas at even larger scales. We believe these experiments and the experimental results constitute a significant step forward toward advancing the state-of-the-art of large-scale, collaborative multi-robot systems operating with real communication, navigation, and perception constraints.
Read more7/16/2024

0
Cooperative Indoor Exploration Leveraging a Mixed-Size UAV Team with Heterogeneous Sensors
Michaela Cihl'av{r}ov'a, V'aclav Pritzl, Martin Saska
Heterogeneous teams of Unmanned Aerial Vehicles (UAVs) can enhance the exploration capabilities of aerial robots by exploiting different strengths and abilities of varying UAVs. This paper presents a novel method for exploring unknown indoor spaces with a team of UAVs of different sizes and sensory equipment. We propose a frontier-based exploration with two task allocation strategies: a greedy strategy that assigns Points of Interest (POIs) based on Euclidean distance and UAV priority and an optimization strategy that solves a minimum-cost flow problem. The proposed method utilizes the SphereMap algorithm to assess the accessibility of the POIs and generate paths that account for obstacle distances, including collision avoidance maneuvers among UAVs. The proposed approach was validated through simulation testing and real-world experiments that evaluated the method's performance on board the UAVs.
Read more7/15/2024

0
Active Semantic Mapping and Pose Graph Spectral Analysis for Robot Exploration
Rongge Zhang, Haechan Mark Bong, Giovanni Beltrame
Exploration in unknown and unstructured environments is a pivotal requirement for robotic applications. A robot's exploration behavior can be inherently affected by the performance of its Simultaneous Localization and Mapping (SLAM) subsystem, although SLAM and exploration are generally studied separately. In this paper, we formulate exploration as an active mapping problem and extend it with semantic information. We introduce a novel active metric-semantic SLAM approach, leveraging recent research advances in information theory and spectral graph theory: we combine semantic mutual information and the connectivity metrics of the underlying pose graph of the SLAM subsystem. We use the resulting utility function to evaluate different trajectories to select the most favorable strategy during exploration. Exploration and SLAM metrics are analyzed in experiments. Running our algorithm on the Habitat dataset, we show that, while maintaining efficiency close to the state-of-the-art exploration methods, our approach effectively increases the performance of metric-semantic SLAM with a 21% reduction in average map error and a 9% improvement in average semantic classification accuracy.
Read more9/4/2024