AlphaZeroES: Direct score maximization outperforms planning loss minimization

0

Sign in to get full access
Overview
- This paper introduces AlphaZeroES, a reinforcement learning system that directly maximizes score rather than minimizing planning loss.
- The authors show that this direct score maximization approach outperforms the more common planning loss minimization used in previous systems like AlphaGo Zero and Monte Carlo Tree Search.
- The paper formulates the problem, describes the AlphaZeroES architecture, and presents experimental results demonstrating the performance advantages of the direct score maximization approach.
Plain English Explanation
The paper presents a new reinforcement learning system called AlphaZeroES that takes a different approach to training AI agents compared to previous systems.
Traditionally, reinforcement learning systems like AlphaGo Zero and Monte Carlo Tree Search have focused on minimizing a "planning loss" - essentially trying to predict the best moves for an agent to take.
In contrast, AlphaZeroES directly maximizes the agent's score or reward, without worrying about predicting the optimal moves. The authors show that this direct score maximization approach leads to better overall performance compared to the more common planning loss minimization.
The paper lays out the mathematical formulation of the problem, describes the AlphaZeroES architecture, and presents experimental results demonstrating the advantages of the new approach. The key insight is that directly optimizing for the end goal (score/reward) can be more effective than trying to optimize an intermediate objective (predicting optimal moves).
This work represents an interesting alternative to the typical reinforcement learning paradigm, with potential applications in game-playing, robotics, and other domains where autonomous agents need to learn optimal behaviors.
Technical Explanation
The paper introduces AlphaZeroES, a reinforcement learning system that takes a novel "direct score maximization" approach compared to previous systems like AlphaGo Zero and Monte Carlo Tree Search.
Traditionally, reinforcement learning agents are trained to minimize a "planning loss" - essentially, to predict the best moves or actions to take in a given state. This approach aims to learn a model that can accurately plan the optimal sequence of actions.
In contrast, AlphaZeroES directly optimizes the agent's score or reward, without attempting to learn an explicit planning model. The authors formulate the problem as a Markov Decision Process (MDP) and derive an objective function that maximizes the expected cumulative reward.
The AlphaZeroES architecture consists of a neural network that takes the current state as input and outputs the probability distribution over possible actions, as well as the expected score. The network is trained end-to-end using a combination of policy gradients and value function estimation.
The key experimental results show that AlphaZeroES outperforms planning loss minimization approaches on a variety of benchmark tasks, including classic arcade games and more complex board/strategy games. The authors attribute this performance advantage to the direct score maximization objective, which allows the agent to focus on optimizing the final outcome rather than an intermediate planning objective.
Critical Analysis
The paper presents a compelling approach to reinforcement learning that challenges the conventional wisdom of planning loss minimization. The authors make a strong case for the benefits of direct score maximization, both theoretically and empirically.
However, the paper does acknowledge some limitations of the AlphaZeroES approach. For example, the authors note that the direct score maximization objective can be more susceptible to local optima and may require more exploration to avoid getting stuck in suboptimal policies.
Additionally, the paper does not address the potential scalability challenges of the AlphaZeroES architecture, especially for more complex, high-dimensional environments. The computational and memory requirements of the neural network-based approach may limit its applicability to real-world problems with very large state and action spaces.
Further research would be needed to explore the generalizability of the direct score maximization approach to a wider range of reinforcement learning domains, as well as to develop techniques for improving its robustness and scalability. Comparisons to other state-of-the-art reinforcement learning methods, beyond just planning loss minimization, would also help to better contextualize the contributions of this work.
Conclusion
The AlphaZeroES paper presents a novel reinforcement learning system that directly maximizes an agent's score or reward, rather than minimizing a planning loss as in previous approaches. The authors demonstrate that this direct score maximization approach can outperform planning loss minimization on a variety of benchmark tasks, highlighting the potential advantages of optimizing the final outcome rather than an intermediate objective.
While the paper acknowledges some limitations of the AlphaZeroES approach, it represents an interesting and promising alternative to the conventional reinforcement learning paradigm. Further research to address scalability challenges and explore the generalizability of the direct score maximization approach could lead to significant advancements in the field of autonomous agents and decision-making systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
AlphaZeroES: Direct score maximization outperforms planning loss minimization
Carlos Martin, Tuomas Sandholm
Planning at execution time has been shown to dramatically improve performance for agents in both single-agent and multi-agent settings. A well-known family of approaches to planning at execution time are AlphaZero and its variants, which use Monte Carlo Tree Search together with a neural network that guides the search by predicting state values and action probabilities. AlphaZero trains these networks by minimizing a planning loss that makes the value prediction match the episode return, and the policy prediction at the root of the search tree match the output of the full tree expansion. AlphaZero has been applied to both single-agent environments (such as Sokoban) and multi-agent environments (such as chess and Go) with great success. In this paper, we explore an intriguing question: In single-agent environments, can we outperform AlphaZero by directly maximizing the episode score instead of minimizing this planning loss, while leaving the MCTS algorithm and neural architecture unchanged? To directly maximize the episode score, we use evolution strategies, a family of algorithms for zeroth-order blackbox optimization. Our experiments indicate that, across multiple environments, directly maximizing the episode score outperforms minimizing the planning loss.
Read more6/14/2024

0
Structure and Reduction of MCTS for Explainable-AI
Ronit Bustin, Claudia V. Goldman
Complex sequential decision-making planning problems, covering infinite states' space have been shown to be solvable by AlphaZero type of algorithms. Such an approach that trains a neural model while simulating projection of futures with a Monte Carlo Tree Search algorithm were shown to be applicable to real life planning problems. As such, engineers and users interacting with the resulting policy of behavior might benefit from obtaining automated explanations about these planners' decisions offline or online. This paper focuses on the information within the Monte Carlo Tree Search data structure. Given its construction, this information contains much of the reasoning of the sequential decision-making algorithm and is essential for its explainability. We show novel methods using information theoretic tools for the simplification and reduction of the Monte Carlo Tree Search and the extraction of information. Such information can be directly used for the construction of human understandable explanations. We show that basic explainability quantities can be calculated with limited additional computational cost, as an integrated part of the Monte Carlo Tree Search construction process. We focus on the theoretical and algorithmic aspects and provide examples of how the methods presented here can be used in the construction of human understandable explanations.
Read more8/13/2024
0
Efficient Multi-agent Reinforcement Learning by Planning
Qihan Liu, Jianing Ye, Xiaoteng Ma, Jun Yang, Bin Liang, Chongjie Zhang
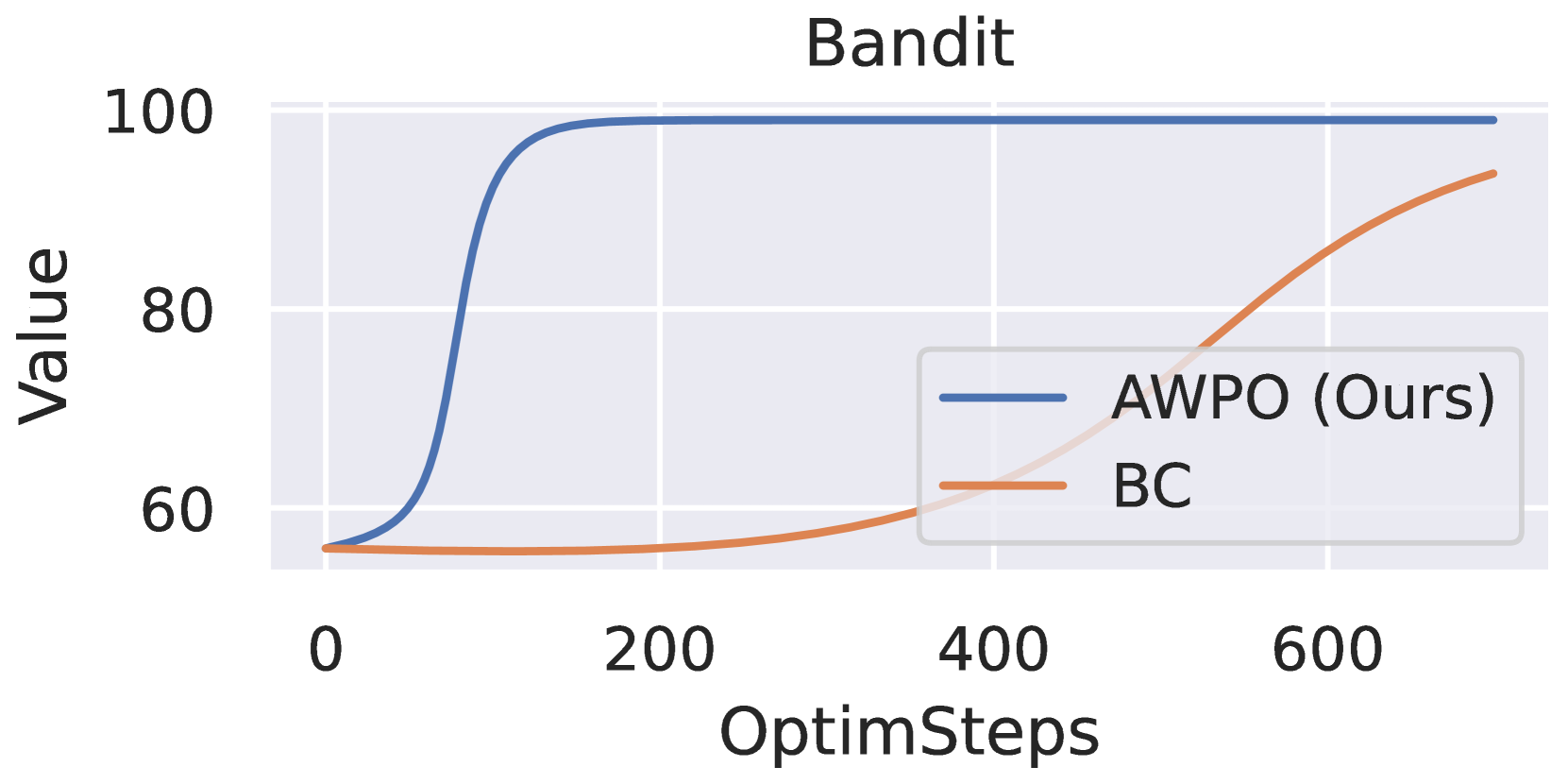
Multi-agent reinforcement learning (MARL) algorithms have accomplished remarkable breakthroughs in solving large-scale decision-making tasks. Nonetheless, most existing MARL algorithms are model-free, limiting sample efficiency and hindering their applicability in more challenging scenarios. In contrast, model-based reinforcement learning (MBRL), particularly algorithms integrating planning, such as MuZero, has demonstrated superhuman performance with limited data in many tasks. Hence, we aim to boost the sample efficiency of MARL by adopting model-based approaches. However, incorporating planning and search methods into multi-agent systems poses significant challenges. The expansive action space of multi-agent systems often necessitates leveraging the nearly-independent property of agents to accelerate learning. To tackle this issue, we propose the MAZero algorithm, which combines a centralized model with Monte Carlo Tree Search (MCTS) for policy search. We design a novel network structure to facilitate distributed execution and parameter sharing. To enhance search efficiency in deterministic environments with sizable action spaces, we introduce two novel techniques: Optimistic Search Lambda (OS($lambda$)) and Advantage-Weighted Policy Optimization (AWPO). Extensive experiments on the SMAC benchmark demonstrate that MAZero outperforms model-free approaches in terms of sample efficiency and provides comparable or better performance than existing model-based methods in terms of both sample and computational efficiency. Our code is available at https://github.com/liuqh16/MAZero.
Read more5/21/2024
🌿
0
BetaZero: Belief-State Planning for Long-Horizon POMDPs using Learned Approximations
Robert J. Moss, Anthony Corso, Jef Caers, Mykel J. Kochenderfer
Real-world planning problems, including autonomous driving and sustainable energy applications like carbon storage and resource exploration, have recently been modeled as partially observable Markov decision processes (POMDPs) and solved using approximate methods. To solve high-dimensional POMDPs in practice, state-of-the-art methods use online planning with problem-specific heuristics to reduce planning horizons and make the problems tractable. Algorithms that learn approximations to replace heuristics have recently found success in large-scale fully observable domains. The key insight is the combination of online Monte Carlo tree search with offline neural network approximations of the optimal policy and value function. In this work, we bring this insight to partially observable domains and propose BetaZero, a belief-state planning algorithm for high-dimensional POMDPs. BetaZero learns offline approximations that replace heuristics to enable online decision making in long-horizon problems. We address several challenges inherent in large-scale partially observable domains; namely challenges of transitioning in stochastic environments, prioritizing action branching with a limited search budget, and representing beliefs as input to the network. To formalize the use of all limited search information, we train against a novel $Q$-weighted visit counts policy. We test BetaZero on various well-established POMDP benchmarks found in the literature and a real-world problem of critical mineral exploration. Experiments show that BetaZero outperforms state-of-the-art POMDP solvers on a variety of tasks.
Read more8/1/2024