Analyzing and Bridging the Gap between Maximizing Total Reward and Discounted Reward in Deep Reinforcement Learning

0

Sign in to get full access
Overview
- This paper examines the gap between maximizing total reward and discounted reward in deep reinforcement learning (RL)
- It analyzes the challenges and trade-offs involved in optimizing for these different reward objectives
- The paper proposes several techniques to bridge the gap and improve the performance of RL agents
Plain English Explanation
In the world of reinforcement learning (RL), agents are trained to make decisions that maximize a reward signal. However, there is often a mismatch between the total reward an agent can accumulate over its lifetime versus the discounted reward it is optimized for.
Trajectory-Oriented Policy Optimization for Sparse Rewards explains that agents may focus on short-term gains at the expense of long-term success when optimizing for discounted reward. Conversely, Reward Centering shows that optimizing for total reward can lead to unstable learning and poor performance on tasks with sparse rewards.
This paper explores ways to bridge this gap and find a better balance between maximizing total reward and discounted reward. It examines techniques like Reward Model Learning vs. Direct Policy Optimization and Constrained Reinforcement Learning with Average Reward Objective to optimize for both short-term and long-term performance.
The goal is to develop RL agents that can make decisions that are not only immediately rewarding, but also lead to the best overall outcomes, similar to how humans often make Policy Learning Balancing Short-Term and Long-Term decisions.
Technical Explanation
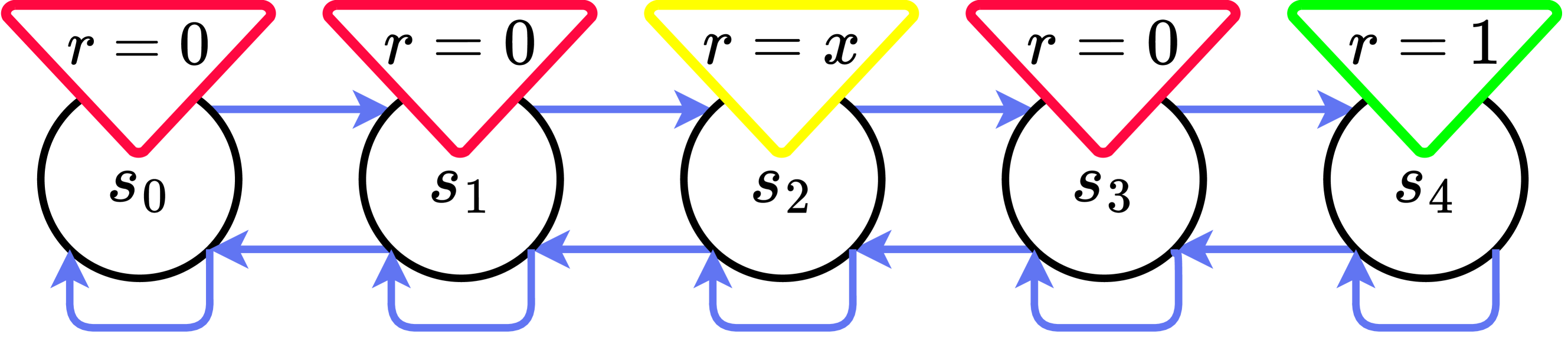
The paper starts by analyzing the fundamental differences between maximizing total reward and discounted reward in RL. It demonstrates that optimizing for discounted reward can lead to myopic behavior, where agents focus on short-term gains at the expense of long-term success. Conversely, optimizing for total reward can be challenging in environments with sparse rewards, leading to unstable learning and poor performance.
To address these issues, the paper proposes several techniques:
-
Reward Model Learning vs. Direct Policy Optimization: The authors explore the trade-offs between learning a separate reward model versus directly optimizing the policy for the desired objective (total or discounted reward).
-
Constrained Reinforcement Learning with Average Reward Objective: The paper introduces a constrained RL framework that optimizes for the average reward objective while ensuring the discounted reward is above a specified threshold.
-
Reward Centering: The authors adapt the reward centering technique to mitigate the instability issues associated with optimizing for total reward in sparse reward environments.
The paper evaluates these approaches on a range of benchmark tasks, demonstrating their effectiveness in bridging the gap between maximizing total and discounted reward. The results show that these techniques can lead to significant performance improvements compared to standard RL methods.
Critical Analysis
The paper provides a thorough analysis of the challenges involved in optimizing for total versus discounted reward in RL. The proposed techniques offer promising solutions to address these issues, but the authors acknowledge that there are still limitations and areas for further research.
One potential concern is the computational complexity and sample efficiency of the constrained RL approach, which may not be practical for large-scale real-world applications. Additionally, the paper does not explore the sensitivity of these techniques to hyperparameter tuning or the impact of different reward structures on their performance.
Furthermore, the paper could have delved deeper into the implications of these findings for the design of real-world RL systems. For example, it could have discussed how the insights from this work could inform the development of RL agents for tasks with both short-term and long-term objectives, such as in robotics, game AI, or resource management.
Overall, this paper provides valuable contributions to the field of RL by shedding light on the fundamental tension between maximizing total and discounted reward, and proposing practical solutions to address this challenge. However, further research is needed to fully understand the implications and limitations of these techniques across a broader range of RL applications.
Conclusion
This paper tackles the important problem of bridging the gap between maximizing total reward and discounted reward in deep reinforcement learning. It analyzes the inherent trade-offs between these two objectives and proposes several techniques to optimize for both short-term and long-term performance.
The key insights from this work could have significant implications for the design of RL agents in a wide range of applications, from robotics and game AI to resource management and decision-making systems. By finding ways to balance immediate rewards with long-term success, RL agents can make more informed and strategic decisions, leading to better overall outcomes.
While the paper presents promising solutions, there are still opportunities for further research to address the limitations and explore the broader implications of these findings. Nonetheless, this work represents an important step forward in the ongoing effort to develop more capable and reliable reinforcement learning systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Analyzing and Bridging the Gap between Maximizing Total Reward and Discounted Reward in Deep Reinforcement Learning
Shuyu Yin, Fei Wen, Peilin Liu, Tao Luo
In deep reinforcement learning applications, maximizing discounted reward is often employed instead of maximizing total reward to ensure the convergence and stability of algorithms, even though the performance metric for evaluating the policy remains the total reward. However, the optimal policies corresponding to these two objectives may not always be consistent. To address this issue, we analyzed the suboptimality of the policy obtained through maximizing discounted reward in relation to the policy that maximizes total reward and identified the influence of hyperparameters. Additionally, we proposed sufficient conditions for aligning the optimal policies of these two objectives under various settings. The primary contributions are as follows: We theoretically analyzed the factors influencing performance when using discounted reward as a proxy for total reward, thereby enhancing the theoretical understanding of this scenario. Furthermore, we developed methods to align the optimal policies of the two objectives in certain situations, which can improve the performance of reinforcement learning algorithms.
Read more7/19/2024
0
To the Max: Reinventing Reward in Reinforcement Learning
Grigorii Veviurko, Wendelin Bohmer, Mathijs de Weerdt
In reinforcement learning (RL), different reward functions can define the same optimal policy but result in drastically different learning performance. For some, the agent gets stuck with a suboptimal behavior, and for others, it solves the task efficiently. Choosing a good reward function is hence an extremely important yet challenging problem. In this paper, we explore an alternative approach for using rewards for learning. We introduce textit{max-reward RL}, where an agent optimizes the maximum rather than the cumulative reward. Unlike earlier works, our approach works for deterministic and stochastic environments and can be easily combined with state-of-the-art RL algorithms. In the experiments, we study the performance of max-reward RL algorithms in two goal-reaching environments from Gymnasium-Robotics and demonstrate its benefits over standard RL. The code is available at https://github.com/veviurko/To-the-Max.
Read more7/31/2024
0
Trajectory-Oriented Policy Optimization with Sparse Rewards
Guojian Wang, Faguo Wu, Xiao Zhang
Mastering deep reinforcement learning (DRL) proves challenging in tasks featuring scant rewards. These limited rewards merely signify whether the task is partially or entirely accomplished, necessitating various exploration actions before the agent garners meaningful feedback. Consequently, the majority of existing DRL exploration algorithms struggle to acquire practical policies within a reasonable timeframe. To address this challenge, we introduce an approach leveraging offline demonstration trajectories for swifter and more efficient online RL in environments with sparse rewards. Our pivotal insight involves treating offline demonstration trajectories as guidance, rather than mere imitation, allowing our method to learn a policy whose distribution of state-action visitation marginally matches that of offline demonstrations. We specifically introduce a novel trajectory distance relying on maximum mean discrepancy (MMD) and cast policy optimization as a distance-constrained optimization problem. We then illustrate that this optimization problem can be streamlined into a policy-gradient algorithm, integrating rewards shaped by insights from offline demonstrations. The proposed algorithm undergoes evaluation across extensive discrete and continuous control tasks with sparse and misleading rewards. The experimental findings demonstrate the significant superiority of our proposed algorithm over baseline methods concerning diverse exploration and the acquisition of an optimal policy.
Read more4/11/2024
📈
0
Reward Model Learning vs. Direct Policy Optimization: A Comparative Analysis of Learning from Human Preferences
Andi Nika, Debmalya Mandal, Parameswaran Kamalaruban, Georgios Tzannetos, Goran Radanovi'c, Adish Singla
In this paper, we take a step towards a deeper understanding of learning from human preferences by systematically comparing the paradigm of reinforcement learning from human feedback (RLHF) with the recently proposed paradigm of direct preference optimization (DPO). We focus our attention on the class of loglinear policy parametrization and linear reward functions. In order to compare the two paradigms, we first derive minimax statistical bounds on the suboptimality gap induced by both RLHF and DPO, assuming access to an oracle that exactly solves the optimization problems. We provide a detailed discussion on the relative comparison between the two paradigms, simultaneously taking into account the sample size, policy and reward class dimensions, and the regularization temperature. Moreover, we extend our analysis to the approximate optimization setting and derive exponentially decaying convergence rates for both RLHF and DPO. Next, we analyze the setting where the ground-truth reward is not realizable and find that, while RLHF incurs a constant additional error, DPO retains its asymptotically decaying gap by just tuning the temperature accordingly. Finally, we extend our comparison to the Markov decision process setting, where we generalize our results with exact optimization. To the best of our knowledge, we are the first to provide such a comparative analysis for RLHF and DPO.
Read more6/6/2024