SplatPose & Detect: Pose-Agnostic 3D Anomaly Detection

0

Sign in to get full access
Overview
- This paper introduces a novel approach called "SplatPose & Detect" for 3D anomaly detection that is agnostic to the pose of the object.
- The key ideas are to use Gaussian splatting to represent 3D data and a pose-agnostic anomaly detection model.
- The method aims to address challenges in industrial visual inspection tasks where objects may be in different orientations.
Plain English Explanation
The researchers have developed a new way to detect when something is abnormal or defective in 3D data, without needing to know the exact position or orientation of the object. This is useful for inspecting manufactured parts or other 3D objects, where the parts may be in different poses but you still want to check if they are normal or have defects.
The key innovation is using a technique called Gaussian splatting to represent the 3D data. This allows the model to be robust to changes in the object's position and orientation. The anomaly detection part of the model is also designed to work without needing to know the exact pose of the object.
Overall, this approach aims to make 3D anomaly detection more practical and flexible for real-world industrial applications, where the objects being inspected may not always be in a consistent pose.
Technical Explanation
The paper proposes a method called "SplatPose & Detect" for 3D anomaly detection that is robust to variations in object pose. It builds on prior work in Gaussian splatting and pose-agnostic 3D representation to create a pipeline that can effectively detect defects without requiring precise knowledge of the object's orientation.
The key components are:
- A Gaussian splatting module to represent the 3D point cloud data in a pose-invariant way.
- An anomaly detection model that can operate directly on the Gaussian splat representation to identify defects, without needing to estimate the object's pose.
The researchers evaluate their approach on industrial inspection tasks and demonstrate improved performance compared to prior pose-dependent methods.
Critical Analysis
The paper presents a compelling approach to address the challenge of 3D anomaly detection in the presence of varying object poses. The use of Gaussian splatting and the pose-agnostic anomaly detection model are well-motivated and seem promising.
However, the paper does not delve deeply into the limitations of the method. For example, it is unclear how the approach would handle significantly occluded or incomplete 3D data, which is common in many real-world industrial scenarios. Additionally, the computational efficiency of the Gaussian splatting and anomaly detection components is not thoroughly explored.
Further research could investigate the robustness of the method to noise, occlusions, and other real-world complications. Comparisons to alternative pose-invariant 3D representation techniques, such as PointNet or PointCNN, would also provide valuable insights.
Conclusion
The "SplatPose & Detect" method proposed in this paper represents an interesting and potentially impactful approach to 3D anomaly detection that is robust to variations in object pose. By leveraging Gaussian splatting and a pose-agnostic anomaly detection model, the authors have developed a system that could significantly improve the capabilities of industrial visual inspection systems.
While the paper demonstrates promising results, further research is needed to fully understand the method's limitations and explore its real-world applicability. Nonetheless, this work contributes valuable insights to the field of 3D computer vision and could inspire future advancements in pose-invariant anomaly detection.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SplatPose & Detect: Pose-Agnostic 3D Anomaly Detection
Mathis Kruse, Marco Rudolph, Dominik Woiwode, Bodo Rosenhahn
Detecting anomalies in images has become a well-explored problem in both academia and industry. State-of-the-art algorithms are able to detect defects in increasingly difficult settings and data modalities. However, most current methods are not suited to address 3D objects captured from differing poses. While solutions using Neural Radiance Fields (NeRFs) have been proposed, they suffer from excessive computation requirements, which hinder real-world usability. For this reason, we propose the novel 3D Gaussian splatting-based framework SplatPose which, given multi-view images of a 3D object, accurately estimates the pose of unseen views in a differentiable manner, and detects anomalies in them. We achieve state-of-the-art results in both training and inference speed, and detection performance, even when using less training data than competing methods. We thoroughly evaluate our framework using the recently proposed Pose-agnostic Anomaly Detection benchmark and its multi-pose anomaly detection (MAD) data set.
Read more4/11/2024
0
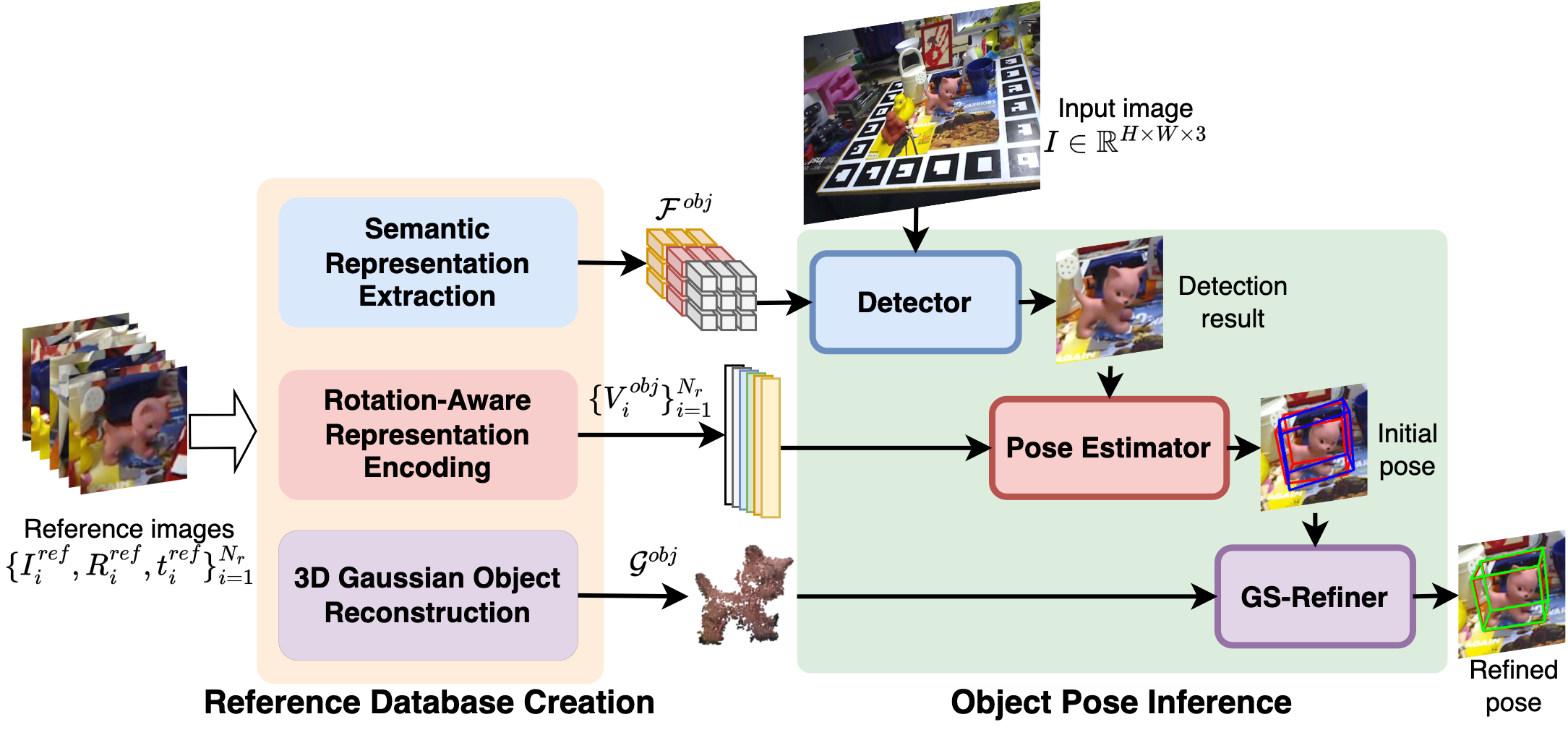
GS-Pose: Generalizable Segmentation-based 6D Object Pose Estimation with 3D Gaussian Splatting
Dingding Cai, Janne Heikkila, Esa Rahtu
This paper introduces GS-Pose, a unified framework for localizing and estimating the 6D pose of novel objects. GS-Pose begins with a set of posed RGB images of a previously unseen object and builds three distinct representations stored in a database. At inference, GS-Pose operates sequentially by locating the object in the input image, estimating its initial 6D pose using a retrieval approach, and refining the pose with a render-and-compare method. The key insight is the application of the appropriate object representation at each stage of the process. In particular, for the refinement step, we leverage 3D Gaussian splatting, a novel differentiable rendering technique that offers high rendering speed and relatively low optimization time. Off-the-shelf toolchains and commodity hardware, such as mobile phones, can be used to capture new objects to be added to the database. Extensive evaluations on the LINEMOD and OnePose-LowTexture datasets demonstrate excellent performance, establishing the new state-of-the-art. Project page: https://dingdingcai.github.io/gs-pose.
Read more8/15/2024
0
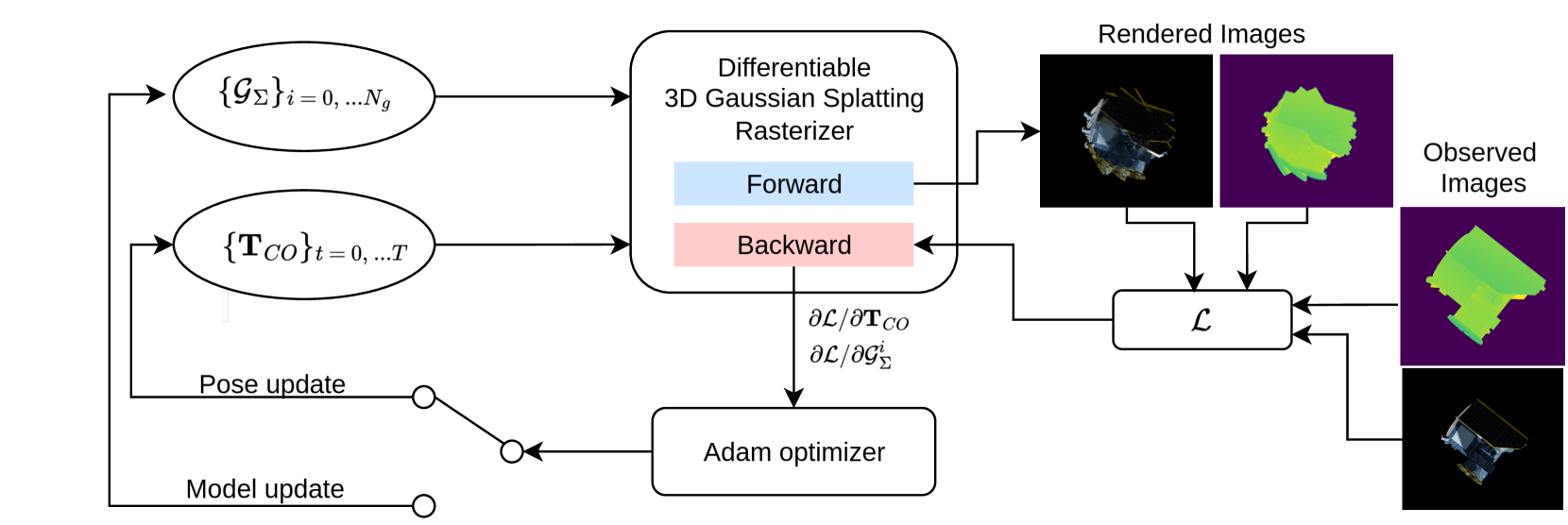
Object-centric Reconstruction and Tracking of Dynamic Unknown Objects using 3D Gaussian Splatting
Kuldeep R Barad, Antoine Richard, Jan Dentler, Miguel Olivares-Mendez, Carol Martinez
Generalizable perception is one of the pillars of high-level autonomy in space robotics. Estimating the structure and motion of unknown objects in dynamic environments is fundamental for such autonomous systems. Traditionally, the solutions have relied on prior knowledge of target objects, multiple disparate representations, or low-fidelity outputs unsuitable for robotic operations. This work proposes a novel approach to incrementally reconstruct and track a dynamic unknown object using a unified representation -- a set of 3D Gaussian blobs that describe its geometry and appearance. The differentiable 3D Gaussian Splatting framework is adapted to a dynamic object-centric setting. The input to the pipeline is a sequential set of RGB-D images. 3D reconstruction and 6-DoF pose tracking tasks are tackled using first-order gradient-based optimization. The formulation is simple, requires no pre-training, assumes no prior knowledge of the object or its motion, and is suitable for online applications. The proposed approach is validated on a dataset of 10 unknown spacecraft of diverse geometry and texture under arbitrary relative motion. The experiments demonstrate successful 3D reconstruction and accurate 6-DoF tracking of the target object in proximity operations over a short to medium duration. The causes of tracking drift are discussed and potential solutions are outlined.
Read more5/31/2024

0
GSLoc: Efficient Camera Pose Refinement via 3D Gaussian Splatting
Changkun Liu, Shuai Chen, Yash Bhalgat, Siyan Hu, Zirui Wang, Ming Cheng, Victor Adrian Prisacariu, Tristan Braud
We leverage 3D Gaussian Splatting (3DGS) as a scene representation and propose a novel test-time camera pose refinement framework, GSLoc. This framework enhances the localization accuracy of state-of-the-art absolute pose regression and scene coordinate regression methods. The 3DGS model renders high-quality synthetic images and depth maps to facilitate the establishment of 2D-3D correspondences. GSLoc obviates the need for training feature extractors or descriptors by operating directly on RGB images, utilizing the 3D vision foundation model, MASt3R, for precise 2D matching. To improve the robustness of our model in challenging outdoor environments, we incorporate an exposure-adaptive module within the 3DGS framework. Consequently, GSLoc enables efficient pose refinement given a single RGB query and a coarse initial pose estimation. Our proposed approach surpasses leading NeRF-based optimization methods in both accuracy and runtime across indoor and outdoor visual localization benchmarks, achieving state-of-the-art accuracy on two indoor datasets.
Read more8/22/2024