Benchmarking Classical and Learning-Based Multibeam Point Cloud Registration

0

Sign in to get full access
Overview
- This paper presents a benchmarking study that compares classical and learning-based methods for registering multibeam point clouds.
- The authors evaluate the performance of different registration algorithms on a diverse dataset of real-world multibeam sonar data.
- The goal is to provide insights into the strengths and weaknesses of various approaches to help guide the selection of appropriate registration techniques for specific applications.
Plain English Explanation
Point cloud registration is the process of aligning multiple sets of 3D data, known as point clouds, so that they form a coherent and consistent 3D model. This is an important task in many applications, such as survey-benchmark-automatic-surface-reconstruction-from-point, freereg-image-to-point-cloud-registration-leveraging, and comprehensive-survey-taxonomy-point-cloud-registration-based.
In this study, the researchers are specifically looking at the problem of registering multibeam point clouds. Multibeam sonar systems use multiple beams to capture 3D data of underwater environments, such as the seafloor or underwater structures. Accurately registering these multibeam point clouds is crucial for deep-learning-based-point-cloud-registration-augmented and mesh-based-photorealistic-real-time-3d-mapping applications.
The researchers have compared classical registration algorithms, which rely on mathematical techniques, with more recent learning-based approaches that use machine learning models. By evaluating these different methods on a diverse dataset of real-world multibeam data, the study aims to provide guidance on which registration techniques are best suited for different scenarios and requirements.
Technical Explanation
The paper presents a comprehensive benchmarking study that evaluates the performance of various classical and learning-based registration algorithms on multibeam point cloud data. The authors have assembled a diverse dataset of real-world multibeam sonar scans, covering a range of environments and capture conditions.
They have compared the accuracy, computational efficiency, and robustness of several classical registration methods, such as Iterative Closest Point (ICP) and its variants, as well as learning-based approaches that leverage deep neural networks for deep-learning-based-point-cloud-registration-augmented . The experiments were designed to assess the algorithms' performance under different levels of noise, overlap, and initial misalignment, which are common challenges in multibeam point cloud registration.
The results of the benchmarking study provide valuable insights into the strengths and limitations of the evaluated techniques. The authors found that while classical methods can be effective in certain scenarios, learning-based approaches often outperform them in terms of accuracy and robustness, especially when dealing with complex or noisy data. However, the computational cost of the deep learning-based methods was generally higher than the classical algorithms.
Critical Analysis
The paper presents a thorough and well-designed benchmarking study, but there are a few potential caveats and areas for further research that could be considered:
-
The dataset, while diverse, may not capture the full range of real-world multibeam sonar conditions that practitioners might encounter. Expanding the dataset to include more varied environments, sensor types, and capture scenarios could further strengthen the generalizability of the findings.
-
The study focuses on pairwise registration, but in many practical applications, users may need to register multiple point clouds simultaneously. Evaluating the performance of the algorithms in a multi-view registration setting could provide additional insights.
-
The authors mention that the learning-based approaches have higher computational costs, which could be a limiting factor in some real-time or resource-constrained applications. Investigating ways to optimize the efficiency of these methods, or exploring hybrid approaches that combine classical and learning-based techniques, could be a promising direction for future research.
-
While the paper provides a comprehensive comparison of registration algorithms, it would be valuable to see the authors extend their analysis to include other quality metrics, such as the interpretability or explainability of the different techniques, which could be important considerations for some users.
Overall, this benchmarking study represents a significant contribution to the field of comprehensive-survey-taxonomy-point-cloud-registration-based, and the insights it provides can help practitioners make more informed decisions when selecting appropriate registration methods for their specific applications.
Conclusion
This paper presents a comprehensive benchmarking study that compares classical and learning-based algorithms for registering multibeam point clouds. The authors have evaluated the performance of various registration techniques on a diverse dataset of real-world multibeam sonar data, considering metrics such as accuracy, computational efficiency, and robustness.
The results of the study provide valuable insights into the strengths and limitations of the different registration approaches. While classical methods can be effective in certain scenarios, the authors found that learning-based techniques often outperform them in terms of accuracy and robustness, especially when dealing with complex or noisy data. However, the computational cost of the deep learning-based methods was generally higher than the classical algorithms.
These findings can help guide the selection of appropriate registration techniques for specific applications, such as survey-benchmark-automatic-surface-reconstruction-from-point, freereg-image-to-point-cloud-registration-leveraging, deep-learning-based-point-cloud-registration-augmented, and mesh-based-photorealistic-real-time-3d-mapping. The study also highlights areas for further research, such as expanding the dataset, exploring multi-view registration, and investigating ways to optimize the efficiency of learning-based methods.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Benchmarking Classical and Learning-Based Multibeam Point Cloud Registration
Li Ling, Jun Zhang, Nils Bore, John Folkesson, Anna W{aa}hlin
Deep learning has shown promising results for multiple 3D point cloud registration datasets. However, in the underwater domain, most registration of multibeam echo-sounder (MBES) point cloud data are still performed using classical methods in the iterative closest point (ICP) family. In this work, we curate and release DotsonEast Dataset, a semi-synthetic MBES registration dataset constructed from an autonomous underwater vehicle in West Antarctica. Using this dataset, we systematically benchmark the performance of 2 classical and 4 learning-based methods. The experimental results show that the learning-based methods work well for coarse alignment, and are better at recovering rough transforms consistently at high overlap (20-50%). In comparison, GICP (a variant of ICP) performs well for fine alignment and is better across all metrics at extremely low overlap (10%). To the best of our knowledge, this is the first work to benchmark both learning-based and classical registration methods on an AUV-based MBES dataset. To facilitate future research, both the code and data are made available online.
Read more5/13/2024
↗️
0
A Survey and Benchmark of Automatic Surface Reconstruction from Point Clouds
Raphael Sulzer, Renaud Marlet, Bruno Vallet, Loic Landrieu
We present a comprehensive survey and benchmark of both traditional and learning-based methods for surface reconstruction from point clouds. This task is particularly challenging for real-world acquisitions due to factors like noise, outliers, non-uniform sampling, and missing data. Traditional approaches often simplify the problem by imposing handcrafted priors on either the input point clouds or the resulting surface, a process that can necessitate tedious hyperparameter tuning. Conversely, deep learning models have the capability to directly learn the properties of input point clouds and desired surfaces from data. We study the influence of these handcrafted and learned priors on the precision and robustness of surface reconstruction techniques. We evaluate various time-tested and contemporary methods in a standardized manner. When both trained and evaluated on point clouds with identical characteristics, the learning-based models consistently produce superior surfaces compared to their traditional counterparts$unicode{x2013}$even in scenarios involving novel shape categories. However, traditional methods demonstrate greater resilience to the diverse array of point cloud anomalies commonly found in real-world 3D acquisitions. For the benefit of the research community, we make our code and datasets available, inviting further enhancements to learning-based surface reconstruction. This can be accessed at https://github.com/raphaelsulzer/dsr-benchmark .
Read more4/17/2024
0
Deep Learning in Medical Image Registration: Magic or Mirage?
Rohit Jena, Deeksha Sethi, Pratik Chaudhari, James C. Gee
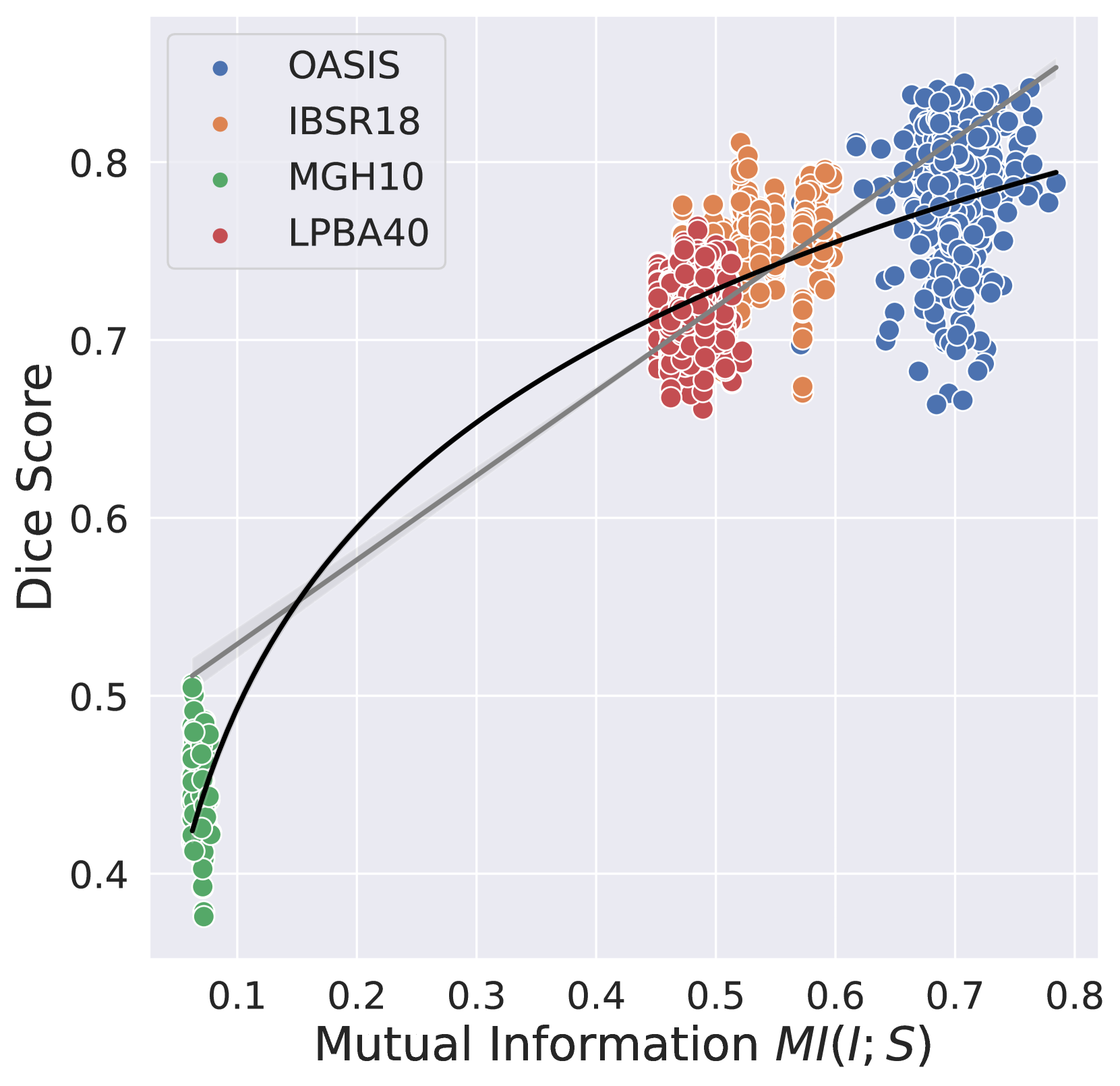
Classical optimization and learning-based methods are the two reigning paradigms in deformable image registration. While optimization-based methods boast generalizability across modalities and robust performance, learning-based methods promise peak performance, incorporating weak supervision and amortized optimization. However, the exact conditions for either paradigm to perform well over the other are shrouded and not explicitly outlined in the existing literature. In this paper, we make an explicit correspondence between the mutual information of the distribution of per-pixel intensity and labels, and the performance of classical registration methods. This strong correlation hints to the fact that architectural designs in learning-based methods is unlikely to affect this correlation, and therefore, the performance of learning-based methods. This hypothesis is thoroughly validated with state-of-the-art classical and learning-based methods. However, learning-based methods with weak supervision can perform high-fidelity intensity and label registration, which is not possible with classical methods. Next, we show that this high-fidelity feature learning does not translate to invariance to domain shift, and learning-based methods are sensitive to such changes in the data distribution. Finally, we propose a general recipe to choose the best paradigm for a given registration problem, based on these observations.
Read more8/13/2024

0
Deep-PE: A Learning-Based Pose Evaluator for Point Cloud Registration
Junjie Gao, Chongjian Wang, Zhongjun Ding, Shuangmin Chen, Shiqing Xin, Changhe Tu, Wenping Wang
In the realm of point cloud registration, the most prevalent pose evaluation approaches are statistics-based, identifying the optimal transformation by maximizing the number of consistent correspondences. However, registration recall decreases significantly when point clouds exhibit a low overlap rate, despite efforts in designing feature descriptors and establishing correspondences. In this paper, we introduce Deep-PE, a lightweight, learning-based pose evaluator designed to enhance the accuracy of pose selection, especially in challenging point cloud scenarios with low overlap. Our network incorporates a Pose-Aware Attention (PAA) module to simulate and learn the alignment status of point clouds under various candidate poses, alongside a Pose Confidence Prediction (PCP) module that predicts the likelihood of successful registration. These two modules facilitate the learning of both local and global alignment priors. Extensive tests across multiple benchmarks confirm the effectiveness of Deep-PE. Notably, on 3DLoMatch with a low overlap rate, Deep-PE significantly outperforms state-of-the-art methods by at least 8% and 11% in registration recall under handcrafted FPFH and learning-based FCGF descriptors, respectively. To the best of our knowledge, this is the first study to utilize deep learning to select the optimal pose without the explicit need for input correspondences.
Read more5/28/2024