Bridging the gap between Learning-to-plan, Motion Primitives and Safe Reinforcement Learning

0

Sign in to get full access
Overview
- Bridging the gap between learning-to-plan, motion primitives, and safe reinforcement learning
- Introduces a novel framework that combines these three elements to enable safe and efficient robot control
- Demonstrates the framework's effectiveness through simulation experiments on a quadruped robot
Plain English Explanation
This paper presents a new approach that combines learning-to-plan, motion primitives, and safe reinforcement learning to enable robots to navigate complex environments safely and efficiently.
The key idea is to use learning-to-plan techniques to find high-level plans that satisfy safety constraints, and then use motion primitives to translate these plans into low-level control actions. This approach allows the robot to reason about safety at a higher level, while still benefiting from the flexibility and adaptability of reinforcement learning for the low-level control.
The authors demonstrate their framework on a quadruped robot, showing how it can navigate challenging terrain while avoiding obstacles and maintaining stability. By combining these different techniques, the framework is able to achieve impressive performance in terms of both safety and efficiency.
Technical Explanation
The paper introduces a novel framework that integrates learning-to-plan, motion primitives, and safe reinforcement learning to enable safe and efficient robot control.
The key components of the framework are:
- Learning-to-plan: A high-level planner that uses a neural network to learn a mapping from the robot's state to a sequence of waypoints that satisfy safety constraints.
- Motion Primitives: A low-level controller that uses a library of pre-defined motion primitives (e.g., steps, jumps, etc.) to translate the waypoints into actuation commands for the robot's joints.
- Safe Reinforcement Learning: A reinforcement learning algorithm that optimizes the low-level controller to maximize performance while respecting safety constraints.
The authors evaluate their framework on a quadruped robot navigating challenging terrain, and show that it outperforms both traditional motion planning approaches and standard reinforcement learning methods in terms of safety, efficiency, and robustness.
Critical Analysis
The paper presents a compelling approach to integrating learning-to-plan, motion primitives, and safe reinforcement learning for robot control. The authors demonstrate the framework's effectiveness through simulation experiments, but it would be interesting to see how it performs on real-world robot platforms.
One potential limitation of the approach is the reliance on pre-defined motion primitives, which may limit the robot's ability to adapt to novel situations or environments. It would be valuable to explore ways of learning and reusing robotic skills in a more flexible and generalizable manner.
Additionally, the authors do not provide a detailed analysis of the computational complexity and scalability of their framework, which would be important considerations for real-world deployment. Integrating model-based footstep planning with model-free reinforcement learning could be a promising direction to address these concerns.
Overall, the paper presents an interesting and promising approach to safe and efficient robot control, and the authors have made a valuable contribution to the field of robotics and autonomous systems.
Conclusion
This paper introduces a novel framework that bridges the gap between learning-to-plan, motion primitives, and safe reinforcement learning for robot control. The framework demonstrates impressive performance in simulation experiments, and could have significant implications for the development of safe and efficient autonomous systems. While the approach has some limitations, the paper represents an important step forward in the field of robotics and AI.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Bridging the gap between Learning-to-plan, Motion Primitives and Safe Reinforcement Learning
Piotr Kicki, Davide Tateo, Puze Liu, Jonas Guenster, Jan Peters, Krzysztof Walas
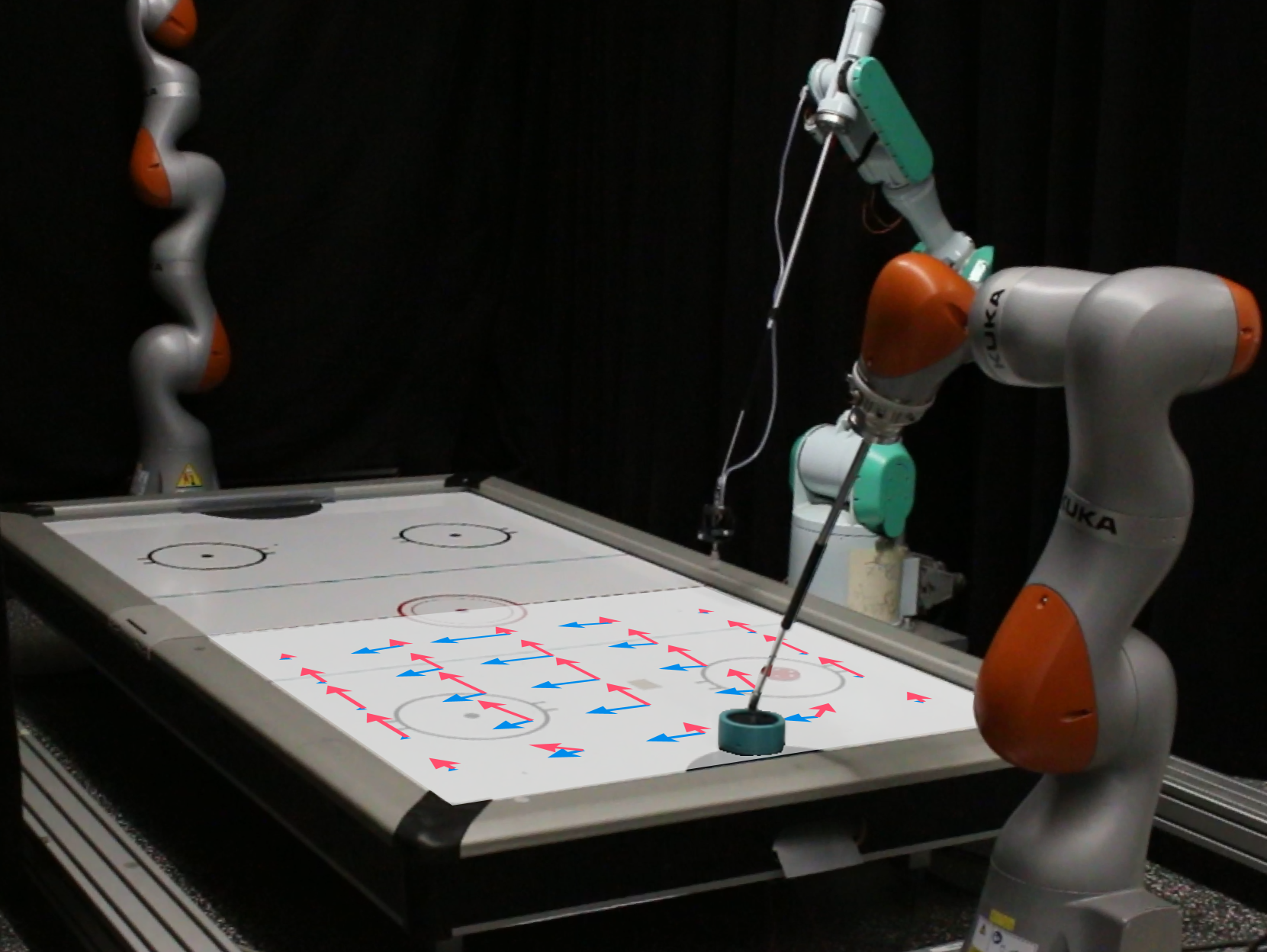
Trajectory planning under kinodynamic constraints is fundamental for advanced robotics applications that require dexterous, reactive, and rapid skills in complex environments. These constraints, which may represent task, safety, or actuator limitations, are essential for ensuring the proper functioning of robotic platforms and preventing unexpected behaviors. Recent advances in kinodynamic planning demonstrate that learning-to-plan techniques can generate complex and reactive motions under intricate constraints. However, these techniques necessitate the analytical modeling of both the robot and the entire task, a limiting assumption when systems are extremely complex or when constructing accurate task models is prohibitive. This paper addresses this limitation by combining learning-to-plan methods with reinforcement learning, resulting in a novel integration of black-box learning of motion primitives and optimization. We evaluate our approach against state-of-the-art safe reinforcement learning methods, showing that our technique, particularly when exploiting task structure, outperforms baseline methods in challenging scenarios such as planning to hit in robot air hockey. This work demonstrates the potential of our integrated approach to enhance the performance and safety of robots operating under complex kinodynamic constraints.
Read more8/27/2024
0
Safe Reinforcement Learning on the Constraint Manifold: Theory and Applications
Puze Liu, Haitham Bou-Ammar, Jan Peters, Davide Tateo
Integrating learning-based techniques, especially reinforcement learning, into robotics is promising for solving complex problems in unstructured environments. However, most existing approaches are trained in well-tuned simulators and subsequently deployed on real robots without online fine-tuning. In this setting, the simulation's realism seriously impacts the deployment's success rate. Instead, learning with real-world interaction data offers a promising alternative: not only eliminates the need for a fine-tuned simulator but also applies to a broader range of tasks where accurate modeling is unfeasible. One major problem for on-robot reinforcement learning is ensuring safety, as uncontrolled exploration can cause catastrophic damage to the robot or the environment. Indeed, safety specifications, often represented as constraints, can be complex and non-linear, making safety challenging to guarantee in learning systems. In this paper, we show how we can impose complex safety constraints on learning-based robotics systems in a principled manner, both from theoretical and practical points of view. Our approach is based on the concept of the Constraint Manifold, representing the set of safe robot configurations. Exploiting differential geometry techniques, i.e., the tangent space, we can construct a safe action space, allowing learning agents to sample arbitrary actions while ensuring safety. We demonstrate the method's effectiveness in a real-world Robot Air Hockey task, showing that our method can handle high-dimensional tasks with complex constraints. Videos of the real robot experiments are available on the project website (https://puzeliu.github.io/TRO-ATACOM).
Read more4/16/2024
↗️
0
Integrating DeepRL with Robust Low-Level Control in Robotic Manipulators for Non-Repetitive Reaching Tasks
Mehdi Heydari Shahna, Seyed Adel Alizadeh Kolagar, Jouni Mattila
In robotics, contemporary strategies are learning-based, characterized by a complex black-box nature and a lack of interpretability, which may pose challenges in ensuring stability and safety. To address these issues, we propose integrating a collision-free trajectory planner based on deep reinforcement learning (DRL) with a novel auto-tuning low-level control strategy, all while actively engaging in the learning phase through interactions with the environment. This approach circumvents the control performance and complexities associated with computations while addressing nonrepetitive reaching tasks in the presence of obstacles. First, a model-free DRL agent is employed to plan velocity-bounded motion for a manipulator with 'n' degrees of freedom (DoF), ensuring collision avoidance for the end-effector through joint-level reasoning. The generated reference motion is then input into a robust subsystem-based adaptive controller, which produces the necessary torques, while the cuckoo search optimization (CSO) algorithm enhances control gains to minimize the stabilization and tracking error in the steady state. This approach guarantees robustness and uniform exponential convergence in an unfamiliar environment, despite the presence of uncertainties and disturbances. Theoretical assertions are validated through the presentation of simulation outcomes.
Read more5/16/2024
📉
0
A Framework for Learning and Reusing Robotic Skills
Brendan Hertel, Nhu Tran, Meriem Elkoudi, Reza Azadeh
In this paper, we present our work in progress towards creating a library of motion primitives. This library facilitates easier and more intuitive learning and reusing of robotic skills. Users can teach robots complex skills through Learning from Demonstration, which is automatically segmented into primitives and stored in clusters of similar skills. We propose a novel multimodal segmentation method as well as a novel trajectory clustering method. Then, when needed for reuse, we transform primitives into new environments using trajectory editing. We present simulated results for our framework with demonstrations taken on real-world robots.
Read more7/1/2024