C$^3$P-VoxelMap: Compact, Cumulative and Coalescible Probabilistic Voxel Mapping

0
Sign in to get full access
Overview
- The paper introduces C3P-VoxelMap, a novel probabilistic voxel mapping approach that is compact, cumulative, and coalescible.
- The proposed method addresses the limitations of existing voxel-based mapping techniques by enabling efficient storage, incremental updates, and merging of voxel maps.
- Key innovations include a compact voxel representation, a cumulative update rule, and a coalescible mapping scheme that allows for merging of multiple voxel maps.
Plain English Explanation
The paper presents a new way to create and manage 3D maps using a technique called "voxel mapping." Voxel mapping is a common approach for representing 3D environments, where the space is divided into small 3D cubes (called voxels) and each voxel stores information about the objects or surfaces in that area.
The authors' method, called C3P-VoxelMap, has three main advantages over traditional voxel mapping:
-
Compact: The way the voxel information is stored requires less memory, making the maps more efficient to store and process.
-
Cumulative: The maps can be updated incrementally as new sensor data is added, without having to rebuild the entire map from scratch.
-
Coalescible: Multiple voxel maps can be easily combined or "merged" together, allowing for the integration of maps from different sources or sensors.
These improvements allow for more efficient and flexible 3D mapping, which is an important capability for applications like robotics, self-driving cars, and augmented reality, where having an accurate and up-to-date understanding of the 3D environment is crucial.
Technical Explanation
The key technical innovations in C3P-VoxelMap are:
-
Compact Voxel Representation: The authors use a probabilistic voxel representation, where each voxel stores a probability distribution instead of a binary occupied/unoccupied state. This allows for more efficient storage compared to traditional binary voxel grids.
-
Cumulative Update Rule: The voxel probabilities are updated incrementally as new sensor data is acquired, using a recursive Bayesian update rule. This avoids the need to rebuild the entire voxel map from scratch when new information becomes available.
-
Coalescible Mapping Scheme: The authors develop a method to merge multiple voxel maps into a single, consistent representation. This is achieved by fusing the voxel probability distributions in a principled way, enabling the integration of maps from different sensors or viewpoints.
The paper includes experiments demonstrating the advantages of C3P-VoxelMap in terms of memory efficiency, incremental updating, and the ability to merge maps, compared to traditional voxel mapping approaches. The results show significant improvements in these key performance metrics, which could have important practical implications for real-world applications.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated solution to the problem of efficient and flexible 3D voxel mapping. The authors have carefully addressed the limitations of existing methods and provided a compelling set of technical innovations to address them.
One potential limitation is that the probabilistic voxel representation may be more computationally expensive to update and query than simpler binary voxel grids, especially for large-scale maps. The authors acknowledge this tradeoff and discuss strategies to mitigate the additional computational burden.
Additionally, the paper does not explore the integration of C3P-VoxelMap with other 3D mapping techniques, such as point cloud compression using implicit neural representations or multi-modal point cloud feature extraction. Exploring these synergies could further enhance the capabilities of the proposed approach.
Overall, the C3P-VoxelMap method represents a significant advancement in the field of 3D voxel mapping, with the potential to enable more efficient and flexible spatial understanding for a wide range of applications.
Conclusion
The C3P-VoxelMap paper introduces a novel probabilistic voxel mapping approach that addresses key limitations of traditional voxel-based techniques. By providing a compact voxel representation, enabling cumulative updates, and allowing for the coalescence of multiple voxel maps, the authors have developed a versatile and efficient 3D mapping solution.
The technical innovations presented in this work could have important implications for robotics, autonomous vehicles, augmented reality, and other applications that require accurate and up-to-date 3D spatial understanding. The authors have demonstrated the effectiveness of their approach through extensive experiments, and the potential for further synergies with other 3D mapping techniques suggests a promising avenue for future research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
C$^3$P-VoxelMap: Compact, Cumulative and Coalescible Probabilistic Voxel Mapping
Xu Yang, Wenhao Li, Qijie Ge, Lulu Suo, Weijie Tang, Zhengyu Wei, Longxiang Huang, Bo Wang
This work presents a compact, cumulative and coalescible probabilistic voxel mapping method to enhance performance, accuracy and memory efficiency in LiDAR odometry. Probabilistic voxel mapping requires storing past point clouds and re-iterating on them to update the uncertainty every iteration, which consumes large memory space and CPU cycles. To solve this problem, we propose a two-folded strategy. First, we introduce a compact point-free representation for probabilistic voxels and derive a cumulative update of the planar uncertainty without caching original point clouds. Our voxel structure only keeps track of a predetermined set of statistics for points that lie inside it. This method reduces the runtime complexity from $O(MN)$ to $O(N)$ and the space complexity from $O(N)$ to $O(1)$ where $M$ is the number of iterations and $N$ is the number of points. Second, to further minimize memory usage and enhance mapping accuracy, we provide a strategy to dynamically merge voxels associated with the same physical planes by taking advantage of the geometric features in the real world. Rather than scanning for these coalescible voxels constantly at every iteration, our merging strategy accumulates voxels in a locality-sensitive hash and triggers merging lazily. On-demand merging not only reduces memory footprint with minimal computational overhead but also improves localization accuracy thanks to cross-voxel denoising. Experiments exhibit 20% higher accuracy, 20% faster performance and 70% lower memory consumption than the state-of-the-art.
Read more6/4/2024
0
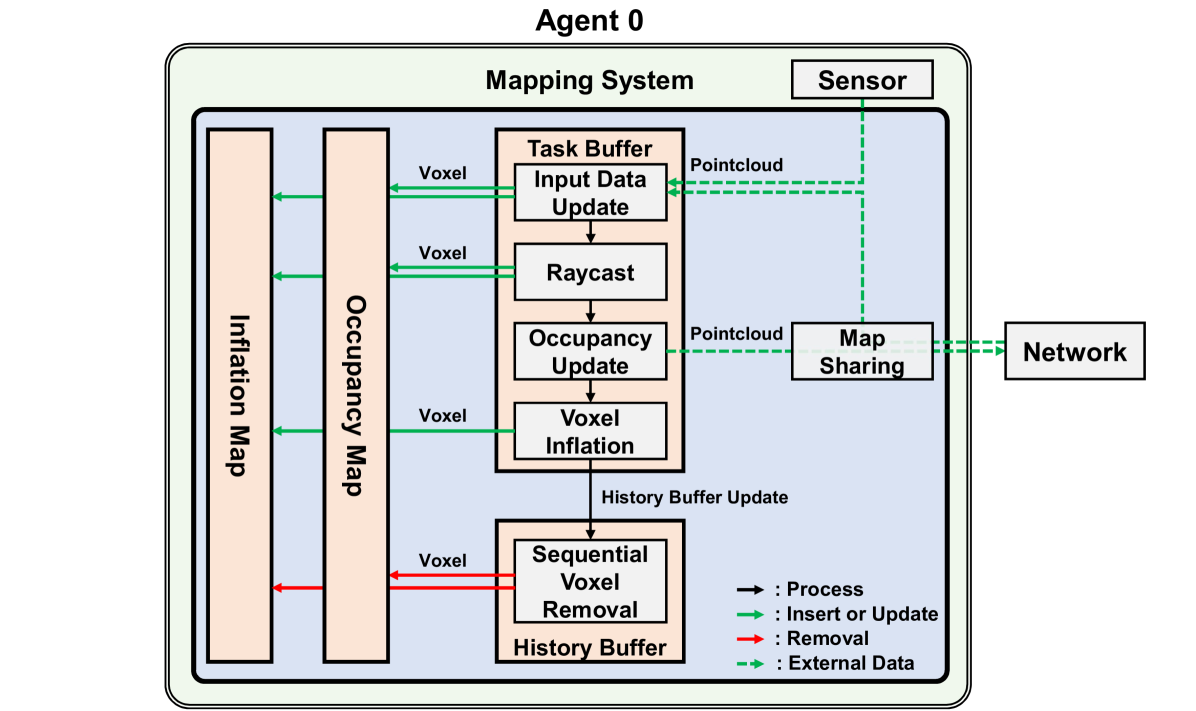
A Robust, Task-Agnostic and Fully-Scalable Voxel Mapping System for Large Scale Environments
Jinche La, Jun-Gill Kang, Dasol Lee
Perception still remains a challenging problem for autonomous navigation in unknown environment, especially for aerial vehicles. Most mapping algorithms for autonomous navigation are specifically designed for their very intended task, which hinders extended usage or cooperative task. In this paper, we propose a voxel mapping system that can build an adaptable map for multiple tasks. The system employs hash table-based map structure and manages each voxel with spatial and temporal priorities without explicit map boundary. We also introduce an efficient map-sharing feature with minimal bandwidth to enable multi-agent applications. We tested the system in real world and simulation environment by applying it for various tasks including local mapping, global mapping, cooperative multi-agent navigation, and high-speed navigation. Our system proved its capability to build customizable map with high resolution, wide coverage, and real-time performance regardless of sensor and environment. The system can build a full-resolution map using the map-sharing feature, with over 95 % of bandwidth reduction from raw sensor data.
Read more9/25/2024
🧪
0
Voxel-Based Point Cloud Localization for Smart Spaces Management
F. S. Mortazavi, O. Shkedova, U. Feuerhake, C. Brenner, M. Sester
This paper proposes a voxel-based approach for creating a digital twin of an urban environment that is capable of efficiently managing smart spaces. The paper explains the registration and localization procedure of the point cloud dataset, which uses the KISS ICP for scan point cloud combination and the RANSAC method for the initial alignment of the combined point cloud. The mobile mapping point cloud using Riegl VMX-250 serves as the reference map, and Velodyne scans are used for localization purposes. The point-to-plane iterative closest-point method is then employed to refine the alignment. The paper evaluates the efficacy of the proposed method by calculating the errors between the estimated and ground truth positions. The results indicate that the voxel-based approach is capable of accurately estimating the position of the sensor platform, which are applicable for various use cases. A specific use case in the context is smart parking space management, which is described and initial visualization results are shown.
Read more6/24/2024

0
Volumetric Semantically Consistent 3D Panoptic Mapping
Yang Miao, Iro Armeni, Marc Pollefeys, Daniel Barath
We introduce an online 2D-to-3D semantic instance mapping algorithm aimed at generating comprehensive, accurate, and efficient semantic 3D maps suitable for autonomous agents in unstructured environments. The proposed approach is based on a Voxel-TSDF representation used in recent algorithms. It introduces novel ways of integrating semantic prediction confidence during mapping, producing semantic and instance-consistent 3D regions. Further improvements are achieved by graph optimization-based semantic labeling and instance refinement. The proposed method achieves accuracy superior to the state of the art on public large-scale datasets, improving on a number of widely used metrics. We also highlight a downfall in the evaluation of recent studies: using the ground truth trajectory as input instead of a SLAM-estimated one substantially affects the accuracy, creating a large gap between the reported results and the actual performance on real-world data.
Read more7/9/2024