A Robust, Task-Agnostic and Fully-Scalable Voxel Mapping System for Large Scale Environments

0
Sign in to get full access
Overview
- This paper presents a task-agnostic, fully-scalable voxel mapping system for large environments.
- The system is designed to handle large-scale mapping tasks efficiently and effectively.
- Key features include:
- Task-agnostic: can be used for a variety of applications, not just a specific task
- Fully-scalable: can handle mapping of large environments without performance degradation
- Voxel-based: uses a voxel representation for the environment
Plain English Explanation
The paper describes a new system for creating detailed 3D maps of large, complex environments. This system is designed to be versatile, meaning it can be used for a wide range of applications, not just a single specific task. It's also scalable, which means it can handle mapping very large environments without the performance degrading.
The key innovation of this system is its use of voxels. Voxels are 3D pixels that can be used to represent the shape and structure of an environment in a detailed, efficient way. By using voxels, this system can create high-quality 3D maps of large spaces without running into memory or computational limitations.
Overall, this new mapping system offers some significant advantages over previous approaches. It's more versatile, able to handle a wider range of tasks, and it can scale up to map extremely large environments. This makes it a powerful tool for a variety of applications, from robotics and autonomous vehicles to virtual and augmented reality.
Technical Explanation
The key technical innovations of this mapping system are:
-
Voxel Representation: The system uses a voxel-based representation of the environment, which allows for detailed 3D modeling while maintaining efficiency and scalability.
-
Task-Agnostic Design: The system is designed to be usable for a wide range of applications, not just a specific task. This is achieved through a modular architecture that separates the core mapping functionality from application-specific components.
-
Scalability: The system is engineered to handle large-scale environments without performance degradation. This is enabled by techniques like hierarchical data structures, parallel processing, and efficient memory management.
-
Sensor Fusion: The system can integrate data from multiple sensor modalities, such as RGB-D cameras, LiDAR, and inertial measurement units, to build a comprehensive and robust 3D map of the environment.
-
Real-Time Performance: The system is designed to operate in real-time, providing low-latency updates to the 3D map as new sensor data is acquired.
Through these technical innovations, the system is able to create high-quality, detailed 3D maps of large environments that can be used for a variety of applications, from robot navigation to virtual reality.
Critical Analysis
The paper presents a comprehensive and well-designed mapping system that addresses several key challenges in large-scale 3D mapping. The use of a voxel-based representation and the focus on scalability and task-agnostic design are particularly noteworthy.
However, the paper does note some limitations and areas for further research:
-
Accuracy vs. Efficiency Trade-off: The authors acknowledge that the voxel-based representation may not be as accurate as other approaches, such as mesh-based representations, in certain scenarios. Further research is needed to find the optimal balance between accuracy and efficiency.
-
Specific Application Benchmarks: While the system is designed to be task-agnostic, the paper does not provide detailed benchmarks or case studies for specific applications. Evaluating the system's performance in real-world use cases would be valuable.
-
Handling Dynamic Environments: The paper focuses on static mapping of large environments. Extending the system to handle dynamic elements, such as moving objects, would be an important area for future work.
-
Energy Efficiency: The scalability and real-time performance of the system are impressive, but the energy consumption of the system is not addressed. Optimizing the system for energy efficiency could be important for certain applications, such as mobile robotics.
Overall, the paper presents a promising and innovative approach to large-scale 3D mapping that could have significant impact on a wide range of applications. Addressing the identified limitations and continuing to refine the system will be important next steps.
Conclusion
This paper introduces a task-agnostic, fully-scalable voxel mapping system designed to handle 3D mapping of large environments effectively and efficiently. The key innovations include the use of a voxel-based representation, a modular and versatile architecture, and scalable techniques for real-time performance.
The system's ability to create detailed 3D maps of large spaces while maintaining high performance can have significant implications for a variety of applications, such as robotics, autonomous vehicles, and virtual/augmented reality. By addressing important challenges in large-scale 3D mapping, this research represents a valuable contribution to the field and lays the groundwork for further advancements in spatial understanding and mapping.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Robust, Task-Agnostic and Fully-Scalable Voxel Mapping System for Large Scale Environments
Jinche La, Jun-Gill Kang, Dasol Lee
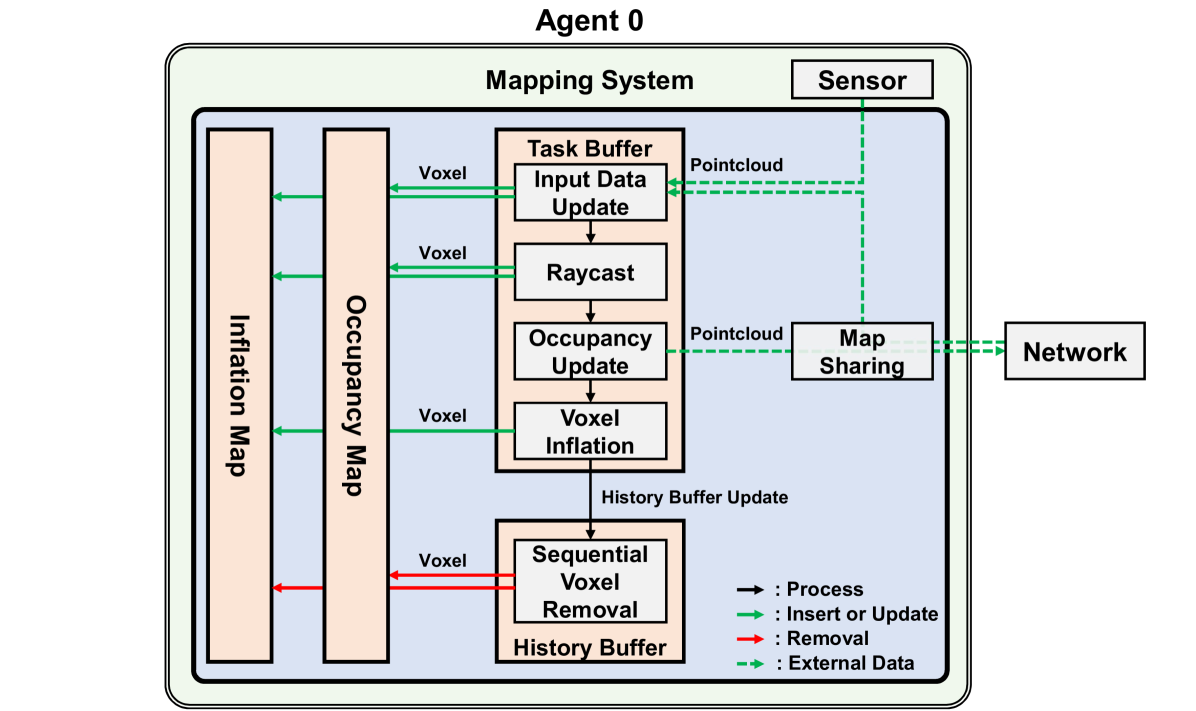
Perception still remains a challenging problem for autonomous navigation in unknown environment, especially for aerial vehicles. Most mapping algorithms for autonomous navigation are specifically designed for their very intended task, which hinders extended usage or cooperative task. In this paper, we propose a voxel mapping system that can build an adaptable map for multiple tasks. The system employs hash table-based map structure and manages each voxel with spatial and temporal priorities without explicit map boundary. We also introduce an efficient map-sharing feature with minimal bandwidth to enable multi-agent applications. We tested the system in real world and simulation environment by applying it for various tasks including local mapping, global mapping, cooperative multi-agent navigation, and high-speed navigation. Our system proved its capability to build customizable map with high resolution, wide coverage, and real-time performance regardless of sensor and environment. The system can build a full-resolution map using the map-sharing feature, with over 95 % of bandwidth reduction from raw sensor data.
Read more9/25/2024
0
Mesh-based Photorealistic and Real-time 3D Mapping for Robust Visual Perception of Autonomous Underwater Vehicle
Jungwoo Lee, Younggun Cho
This paper proposes a photorealistic real-time dense 3D mapping system that utilizes a learning-based image enhancement method and mesh-based map representation. Due to the characteristics of the underwater environment, where problems such as hazing and low contrast occur, it is hard to apply conventional simultaneous localization and mapping (SLAM) methods. Furthermore, for sensitive tasks like inspecting cracks, photorealistic mapping is very important. However, the behavior of Autonomous Underwater Vehicle (AUV) is computationally constrained. In this paper, we utilize a neural network-based image enhancement method to improve pose estimation and mapping quality and apply a sliding window-based mesh expansion method to enable lightweight, fast, and photorealistic mapping. To validate our results, we utilize real-world and indoor synthetic datasets. We performed qualitative validation with the real-world dataset and quantitative validation by modeling images from the indoor synthetic dataset as underwater scenes.
Read more4/30/2024

0
Online Temporal Fusion for Vectorized Map Construction in Mapless Autonomous Driving
Jiagang Chen, Liangliang Pan, Shunping Ji, Ji Zhao, Zichao Zhang
To reduce the reliance on high-definition (HD) maps, a growing trend in autonomous driving is leveraging on-board sensors to generate vectorized maps online. However, current methods are mostly constrained by processing only single-frame inputs, which hampers their robustness and effectiveness in complex scenarios. To overcome this problem, we propose an online map construction system that exploits the long-term temporal information to build a consistent vectorized map. First, the system efficiently fuses all historical road marking detections from an off-the-shelf network into a semantic voxel map, which is implemented using a hashing-based strategy to exploit the sparsity of road elements. Then reliable voxels are found by examining the fused information and incrementally clustered into an instance-level representation of road markings. Finally, the system incorporates domain knowledge to estimate the geometric and topological structures of roads, which can be directly consumed by the planning and control (PnC) module. Through experiments conducted in complicated urban environments, we have demonstrated that the output of our system is more consistent and accurate than the network output by a large margin and can be effectively used in a closed-loop autonomous driving system.
Read more9/4/2024

0
Volumetric Semantically Consistent 3D Panoptic Mapping
Yang Miao, Iro Armeni, Marc Pollefeys, Daniel Barath
We introduce an online 2D-to-3D semantic instance mapping algorithm aimed at generating comprehensive, accurate, and efficient semantic 3D maps suitable for autonomous agents in unstructured environments. The proposed approach is based on a Voxel-TSDF representation used in recent algorithms. It introduces novel ways of integrating semantic prediction confidence during mapping, producing semantic and instance-consistent 3D regions. Further improvements are achieved by graph optimization-based semantic labeling and instance refinement. The proposed method achieves accuracy superior to the state of the art on public large-scale datasets, improving on a number of widely used metrics. We also highlight a downfall in the evaluation of recent studies: using the ground truth trajectory as input instead of a SLAM-estimated one substantially affects the accuracy, creating a large gap between the reported results and the actual performance on real-world data.
Read more7/9/2024