Characterization and Design of A Hollow Cylindrical Ultrasonic Motor

0
Sign in to get full access
Overview
- Characterization and design of a hollow cylindrical ultrasonic motor
- Proposed for use in MRI-compatible actuators
- Studied through finite element modeling and digital holographic interferometry
Plain English Explanation
This paper describes the development and analysis of a hollow cylindrical ultrasonic motor. Ultrasonic motors are a type of electric motor that use high-frequency vibrations to generate motion, and they can be designed in a variety of shapes and sizes.
The hollow cylindrical design proposed in this paper is intended to be compatible with magnetic resonance imaging (MRI) systems, where traditional electric motors would interfere with the sensitive imaging equipment. By using a hollow cylinder shape, the motor can be placed around the item being imaged without blocking the imaging field.
The researchers used finite element modeling to design and analyze the motor, and then validated their models using digital holographic interferometry, which is a technique for measuring vibrations and deformations. This allowed them to optimize the motor's performance and understand how it would behave in real-world applications.
Technical Explanation
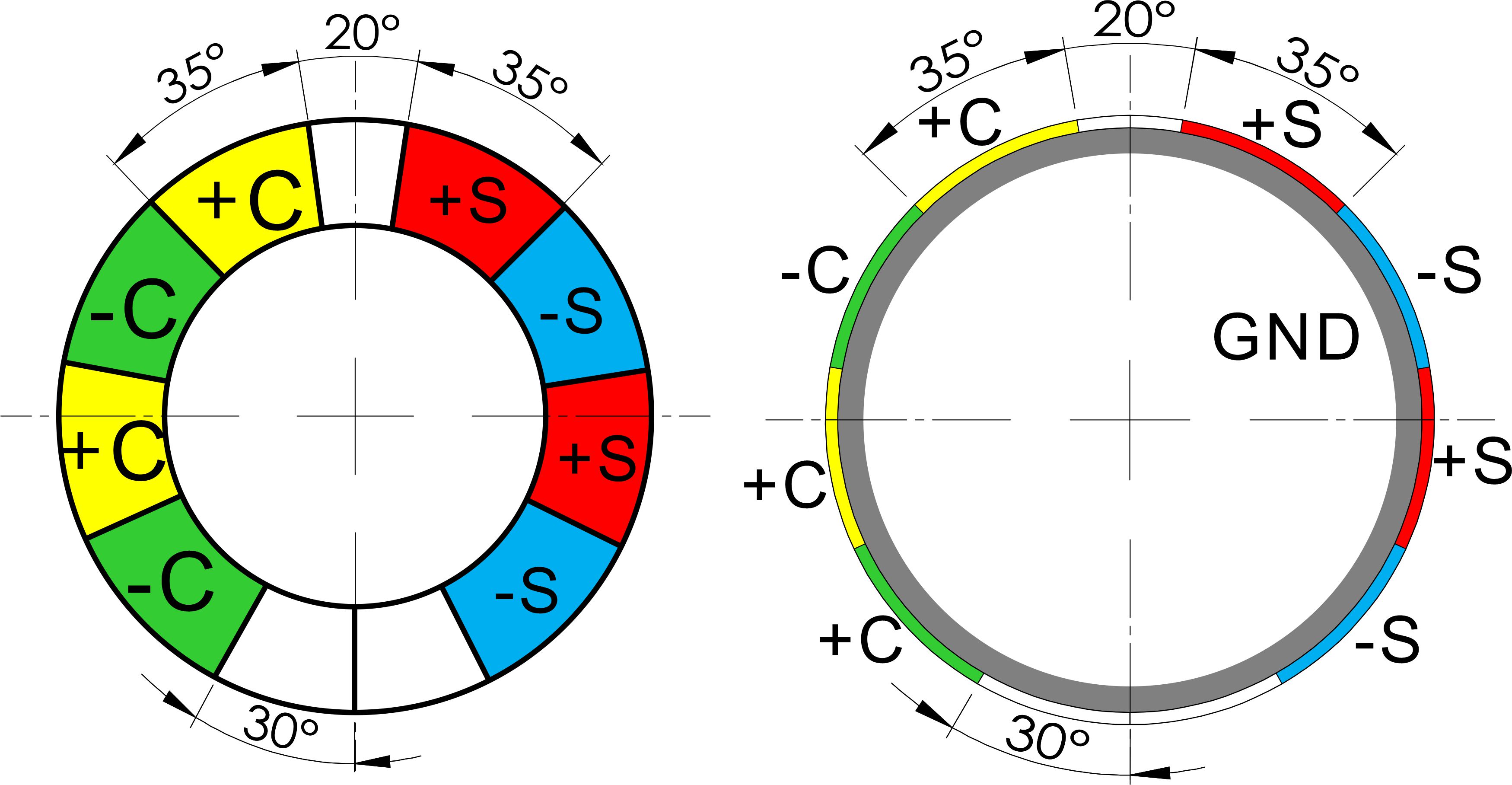
The paper presents the design and characterization of a hollow cylindrical ultrasonic motor that is intended for use in MRI-compatible actuators. The motor is composed of a cylindrical stator and a cylindrical rotor, with the stator driven by two piezoelectric elements that generate high-frequency vibrations.
The researchers used finite element modeling to optimize the design of the motor, exploring parameters such as the stator and rotor dimensions, the placement of the piezoelectric elements, and the driving frequency. They then validated their models using digital holographic interferometry, which allowed them to measure the vibration patterns and deformations of the stator surface during operation.
The results showed that the hollow cylindrical design could achieve a high torque density and good control over the motor's speed and direction. The researchers also identified several key factors that influenced the motor's performance, such as the stator thickness, the gap between the stator and rotor, and the driving frequency.
Critical Analysis
The paper provides a thorough characterization and design of the proposed hollow cylindrical ultrasonic motor, with a strong focus on ensuring its compatibility with MRI systems. The use of finite element modeling and digital holographic interferometry is a robust approach to understand the motor's behavior and optimize its performance.
However, the paper does not address some potential limitations or areas for further research. For example, it does not discuss the long-term reliability and durability of the motor, or how it might be affected by the strong magnetic fields and radio-frequency noise present in MRI environments. Additionally, the researchers could have explored the motor's behavior under different loading conditions or its efficiency compared to other MRI-compatible actuator technologies.
Despite these minor shortcomings, the paper presents a compelling design for a hollow cylindrical ultrasonic motor that could have significant applications in the field of MRI-compatible medical devices and robotic systems.
Conclusion
The paper describes the characterization and design of a hollow cylindrical ultrasonic motor, which is proposed as a potential solution for MRI-compatible actuators. The researchers used finite element modeling and digital holographic interferometry to optimize the motor's performance and validate their design.
The resulting hollow cylindrical motor demonstrates promising capabilities in terms of torque density and speed control, making it a viable option for integration into MRI-compatible medical and robotic systems. While the paper does not address all potential limitations, it provides a robust framework for the development and characterization of this type of MRI-compatible actuator.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Characterization and Design of A Hollow Cylindrical Ultrasonic Motor
Zhanyue Zhao, Yang Wang, Charles Bales, Daniel Ruiz-Cadalso, Howard Zheng, Cosme Furlong-Vazquez, Gregory Fischer
Piezoelectric ultrasonic motors perform the advantages of compact design, faster reaction time, and simpler setup compared to other motion units such as pneumatic and hydraulic motors, especially its non-ferromagnetic property makes it a perfect match in MRI-compatible robotics systems compared to traditional DC motors. Hollow shaft motors address the advantages of being lightweight and comparable to solid shafts of the same diameter, low rotational inertia, high tolerance to rotational imbalance due to low weight, and tolerance to high temperature due to low specific mass. This article presents a prototype of a hollow cylindrical ultrasonic motor (HCM) to perform direct drive, eliminate mechanical non-linearity, and reduce the size and complexity of the actuator or end effector assembly. Two equivalent HCMs are presented in this work, and under 50g prepressure on the rotor, it performed 383.3333rpm rotation speed and 57.3504mNm torque output when applying 282$V_{pp}$ driving voltage.
Read more9/14/2024

0
Design and Characterization of MRI-compatible Plastic Ultrasonic Motor
Zhanyue Zhao, Charles Bales, Gregory Fischer
Precise surgical procedures may benefit from intra-operative image guidance using magnetic resonance imaging (MRI). However, the MRI's strong magnetic fields, fast switching gradients, and constrained space pose the need for an MR-guided robotic system to assist the surgeon. Piezoelectric actuators can be used in an MRI environment by utilizing the inverse piezoelectric effect for different application purposes. Piezoelectric ultrasonic motor (USM) is one type of MRI-compatible actuator that can actuate these robots with fast response times, compactness, and simple configuration. Although the piezoelectric motors are mostly made of nonferromagnetic material, the generation of eddy currents due to the MRI's gradient fields can lead to magnetic field distortions causing image artifacts. Motor vibrations due to interactions between the MRI's magnetic fields and those generated by the eddy currents can further degrade image quality by causing image artifacts. In this work, a plastic piezoelectric ultrasonic (USM) motor with more degree of MRI compatibility was developed and induced with preliminary optimization. Multiple parameters, namely teeth number, notch size, edge bevel or straight, and surface finish level parameters were used versus the prepressure for the experiment, and the results suggested that using 48 teeth, thin teeth notch with 0.39mm, beveled edge and a surface finish using grit number of approximate 1000 sandpaper performed a better output both in rotary speed and torque. Under this combination, the highest speed reached up to 436.6665rpm when the prepressure was low, and the highest torque reached up to 0.0348Nm when the prepressure was approximately 500g.
Read more9/9/2024

0
Study of MRI-compatible Notched Plastic Ultrasonic Stator with FEM Simulation and Holography Validation
Zhanyue Zhao, Haimi Tang, Paulo Carvalho, Cosme Furlong, Gregory S. Fischer
Intra-operative image guidance using magnetic resonance imaging (MRI) can significantly enhance the precision of surgical procedures, such as deep brain tumor ablation. However, the powerful magnetic fields and limited space within an MRI scanner require the use of robotic devices to aid surgeons. Piezoelectric motors are commonly utilized to drive these robots, with piezoelectric ultrasonic motors being particularly notable. These motors consist of a piezoelectric ring stator that is bonded to a rotor through frictional coupling. When the stator is excited at specific frequencies, it generates distinctive mode shapes with surface waves that exhibit both in-plane and out-of-plane displacement, leading to the rotation of the rotor. In this study, we continue our previous work and refine the motor design and performance, we combine finite element modeling (FEM) with stroboscopic and time-averaged digital holography to validate a further plastic-based ultrasonic motor with better rotary performance.
Read more8/19/2024

0
New!Finite Element Modeling of Surface Traveling Wave Friction Driven for Rotary Ultrasonic Motor
Zhanyue Zhao, Yang Wang, Charles Bales, Yiwei Jiang, Gregory Fischer
Finite element modeling (FEM) is a critical tool in the design and analysis of piezoelectric devices, offering detailed numerical simulations that guide various applications. While traditionally applied to eigenfrequency analysis and time-dependent studies for predicting excitation eigenfrequencies and estimating traveling wave amplitudes, FEM's potential extends to more sophisticated tasks. Advanced FEM applications, such as modeling friction-driven dynamic motion and reaction forces, are essential for accurately simulating the complex behaviors of piezoelectric actuators under real-world conditions. This paper presents a comprehensive motor model that encompasses the coupling dynamics between the stator and rotor in a piezoelectric ultrasonic motor (USM). Utilizing contact theory, the model simulates the complex conditions encountered during the USM's initial start-up phase and its transition to steady-state operation. Implemented in COMSOL Multiphysics, the model provides an in-depth analysis of a rotary piezoelectric actuator, capturing the dynamic interactions and reaction forces that influence its performance. The introduction of this FEM-based model represents a significant advancement in the simulation and understanding of piezoelectric actuators. By offering a more complete picture of the motor's behavior from start-up to steady state, this study enables more accurate control and optimization of piezoelectric devices, enhancing their efficiency and reliability in practical applications.
Read more9/18/2024