Collaborative real-time vision-based device for olive oil production monitoring

0

Sign in to get full access
Overview
- Collaborative real-time vision-based device for monitoring olive oil production
- Uses computer vision and high-end IoT technology
- Aims to improve efficiency and quality control in the olive oil industry
Plain English Explanation
This research paper describes a new device that uses computer vision and advanced IoT (Internet of Things) technology to monitor olive oil production in real-time. The goal is to improve efficiency and quality control in the olive oil industry.
The device is designed to be collaborative, meaning it can work together with other devices and systems to gather and analyze data from the olive oil production process. By using computer vision-based quality assessment techniques, the device can automatically inspect and evaluate the olive oil at various stages of production. This helps identify any issues or problems early on, allowing producers to make adjustments and ensure a higher-quality final product.
The researchers also incorporated automated real-time inspection capabilities to monitor the production environment and detect any irregularities. This could include things like temperature, humidity, or the presence of foreign objects. By continuously tracking these factors, the device can help maintain optimal conditions for olive oil production.
Additionally, the device leverages vision-based robot manipulation techniques to automate certain tasks, such as transferring or packaging the olive oil. This can improve efficiency and reduce the risk of human error.
Technical Explanation
The researchers developed a collaborative real-time vision-based device for monitoring olive oil production. The device combines several advanced technologies, including computer vision, IoT sensors, and robotic manipulation.
The core of the system is a network of high-resolution cameras that continuously capture images and video of the olive oil production process. These images are then analyzed using computer vision algorithms to assess the quality, consistency, and any potential issues with the olive oil. The device can detect factors such as color, clarity, and the presence of foreign particles.
In addition to the visual analysis, the device is equipped with a variety of IoT sensors that monitor the production environment. This includes automated real-time inspection of parameters like temperature, humidity, and the presence of contaminants. By continuously tracking these factors, the device can help maintain optimal conditions for olive oil production.
The device also incorporates vision-based robot manipulation capabilities to automate certain tasks, such as transferring or packaging the olive oil. This can improve efficiency and reduce the risk of human error.
The collaborative nature of the device allows it to work in tandem with other systems and devices in the olive oil production facility. This enables the sharing of data and the coordination of various processes to optimize the overall production workflow.
Critical Analysis
The researchers have presented a promising approach to improving the efficiency and quality control of olive oil production. The use of computer vision, IoT sensors, and robotic automation is well-aligned with the challenges faced by the industry, such as the need for consistent quality, reduced waste, and increased productivity.
One potential limitation of the device is its reliance on a network of high-resolution cameras. While this provides comprehensive visual data, it may also raise concerns about the privacy and security of the production facility. The researchers should consider stereo vision-based remote monitoring techniques that can provide the necessary data without compromising the privacy of workers or the facility.
Additionally, the device's integration with other systems and devices in the production facility may require significant coordination and compatibility efforts. The researchers should explore hybrid machine learning and image segmentation approaches to ensure seamless integration and data sharing across different platforms.
Overall, the collaborative real-time vision-based device presents a promising solution for improving olive oil production. However, the researchers should carefully consider the potential challenges and limitations to ensure its successful deployment and widespread adoption in the industry.
Conclusion
The research paper presents a collaborative real-time vision-based device for monitoring olive oil production. By combining computer vision, IoT sensors, and robotic automation, the device aims to enhance efficiency, quality control, and environmental monitoring in the olive oil industry.
The device's ability to continuously assess the visual characteristics of the olive oil, along with its monitoring of the production environment, can help producers identify and address issues early on, leading to a higher-quality final product. The collaborative nature of the device also enables the integration and coordination of various systems and processes, further optimizing the overall production workflow.
While the proposed solution shows significant potential, the researchers should address potential challenges related to privacy, security, and system integration to ensure the successful deployment and widespread adoption of the technology in the olive oil industry.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Collaborative real-time vision-based device for olive oil production monitoring
Matija v{S}ukovi'c, Igor Jovanv{c}evi'c
This paper proposes an innovative approach to improving quality control of olive oil manufacturing and preventing damage to the machinery caused by foreign objects. We developed a computer-vision-based system that monitors the input of an olive grinder and promptly alerts operators if a foreign object is detected, indicating it by using guided lasers, audio, and visual cues.
Read more7/19/2024

0
A Computer Vision-Based Quality Assessment Technique for the automatic control of consumables for analytical laboratories
Meriam Zribi, Paolo Pagliuca, Francesca Pitolli
The rapid growth of the Industry 4.0 paradigm is increasing the pressure to develop effective automated monitoring systems. Artificial Intelligence (AI) is a convenient tool to improve the efficiency of industrial processes while reducing errors and waste. In fact, it allows the use of real-time data to increase the effectiveness of monitoring systems, minimize errors, make the production process more sustainable, and save costs. In this paper, a novel automatic monitoring system is proposed in the context of production process of plastic consumables used in analysis laboratories, with the aim to increase the effectiveness of the control process currently performed by a human operator. In particular, we considered the problem of classifying the presence or absence of a transparent anticoagulant substance inside test tubes. Specifically, a hand-designed deep network model is used and compared with some state-of-the-art models for its ability to categorize different images of vials that can be either filled with the anticoagulant or empty. Collected results indicate that the proposed approach is competitive with state-of-the-art models in terms of accuracy. Furthermore, we increased the complexity of the task by training the models on the ability to discriminate not only the presence or absence of the anticoagulant inside the vial, but also the size of the test tube. The analysis performed in the latter scenario confirms the competitiveness of our approach. Moreover, our model is remarkably superior in terms of its generalization ability and requires significantly fewer resources. These results suggest the possibility of successfully implementing such a model in the production process of a plastic consumables company.
Read more4/17/2024
0
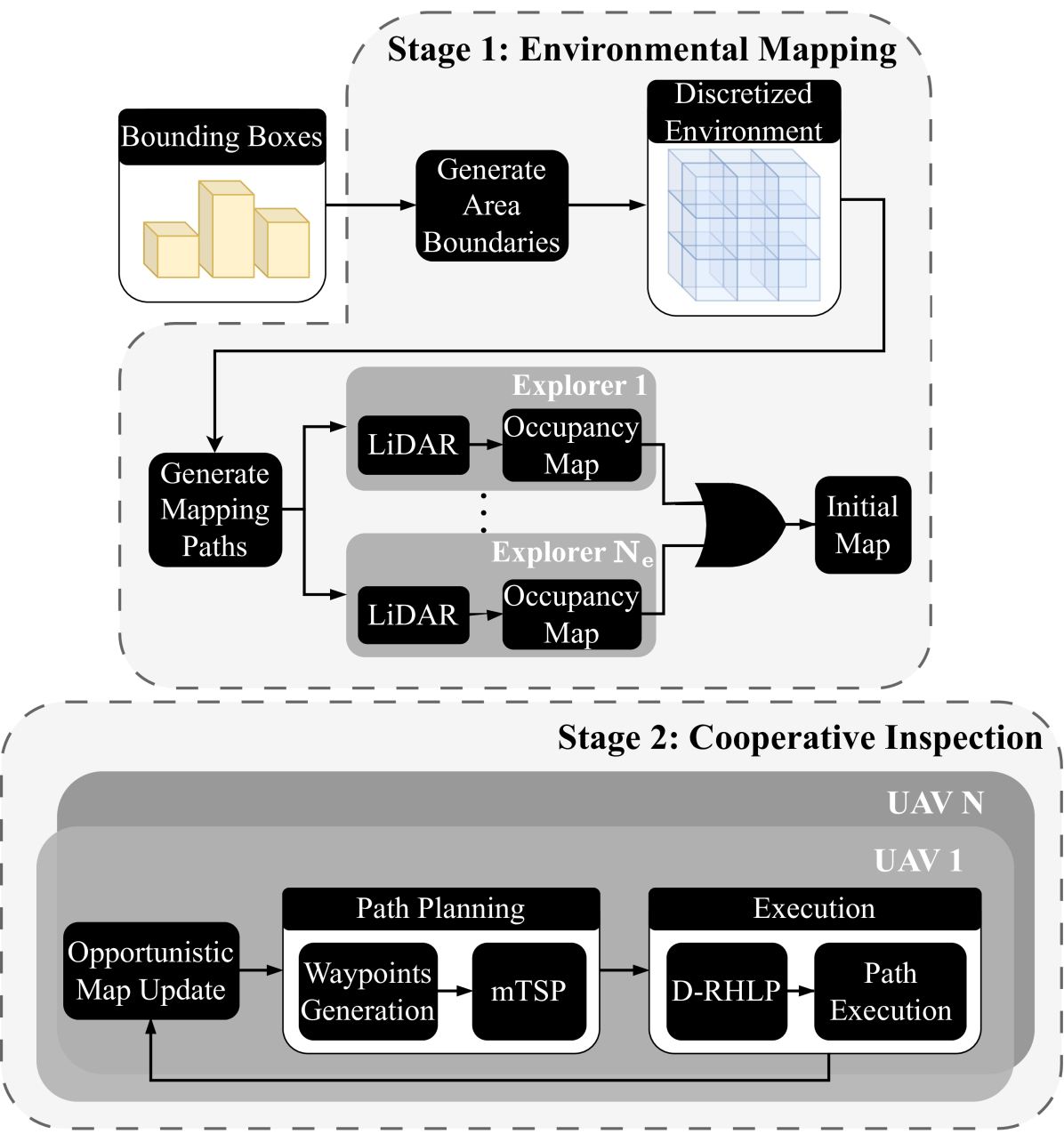
Automated Real-Time Inspection in Indoor and Outdoor 3D Environments with Cooperative Aerial Robots
Andreas Anastasiou, Angelos Zacharia, Savvas Papaioannou, Panayiotis Kolios, Christos G. Panayiotou, Marios M. Polycarpou
This work introduces a cooperative inspection system designed to efficiently control and coordinate a team of distributed heterogeneous UAV agents for the inspection of 3D structures in cluttered, unknown spaces. Our proposed approach employs a two-stage innovative methodology. Initially, it leverages the complementary sensing capabilities of the robots to cooperatively map the unknown environment. It then generates optimized, collision-free inspection paths, thereby ensuring comprehensive coverage of the structure's surface area. The effectiveness of our system is demonstrated through qualitative and quantitative results from extensive Gazebo-based simulations that closely replicate real-world inspection scenarios, highlighting its ability to thoroughly inspect real-world-like 3D structures.
Read more4/19/2024

0
Enhancing Agricultural Environment Perception via Active Vision and Zero-Shot Learning
Michele Carlo La Greca, Mirko Usuelli, Matteo Matteucci
Agriculture, fundamental for human sustenance, faces unprecedented challenges. The need for efficient, human-cooperative, and sustainable farming methods has never been greater. The core contributions of this work involve leveraging Active Vision (AV) techniques and Zero-Shot Learning (ZSL) to improve the robot's ability to perceive and interact with agricultural environment in the context of fruit harvesting. The AV Pipeline implemented within ROS 2 integrates the Next-Best View (NBV) Planning for 3D environment reconstruction through a dynamic 3D Occupancy Map. Our system allows the robotics arm to dynamically plan and move to the most informative viewpoints and explore the environment, updating the 3D reconstruction using semantic information produced through ZSL models. Simulation and real-world experimental results demonstrate our system's effectiveness in complex visibility conditions, outperforming traditional and static predefined planning methods. ZSL segmentation models employed, such as YOLO World + EfficientViT SAM, exhibit high-speed performance and accurate segmentation, allowing flexibility when dealing with semantic information in unknown agricultural contexts without requiring any fine-tuning process.
Read more9/20/2024