Confidence-Triggered Detection: Accelerating Real-time Tracking-by-detection Systems

0
🔮
Sign in to get full access
Overview
- Real-time object tracking must balance speed and accuracy, which can be challenging with deep learning methods
- The proposed Confidence-Triggered Detection (CTD) approach strategically skips object detection for frames similar to previous ones, using tracker confidence scores
- CTD improves tracking speed while preserving accuracy, outperforming existing tracking algorithms
- Extensive evaluation identifies an optimal trade-off between speed and accuracy, providing insights for practical real-world applications
- Experiments across diverse detection models demonstrate the robustness and versatility of the CTD framework
Plain English Explanation
Object tracking in real-time is a delicate balancing act between how fast the system can process the data and how accurately it can identify the objects. This challenge is made even harder by the computationally demanding nature of deep learning methods.
The researchers have developed a new approach called Confidence-Triggered Detection (CTD) that aims to address this issue. CTD strategically skips the object detection step for frames that are very similar to previous ones, and instead relies on the confidence scores from the object tracker. This allows the system to run much faster without sacrificing accuracy. In fact, CTD outperforms existing tracking algorithms.
The researchers thoroughly tested CTD across different tracker confidence thresholds to find the best compromise between speed and accuracy. This provides valuable guidance on how to fine-tune the system for real-world use cases, where speed and efficiency are crucial, such as real-time vehicle and pedestrian tracking.
Importantly, the CTD framework proved to be robust and versatile, working well with a variety of different object detection models. This suggests it could enable real-time object tracking even in resource-constrained environments, like on mobile devices or robots.
Technical Explanation
The core innovation of the Confidence-Triggered Detection (CTD) approach is its strategic bypassing of the object detection step for frames that are highly similar to previous ones. By leveraging the confidence scores from the object tracker, CTD is able to maintain tracking accuracy while significantly boosting processing speed.
Through extensive evaluation across multiple tracker confidence thresholds, the researchers identified an optimal trade-off between tracking speed and accuracy. This provides crucial insights to guide parameter fine-tuning and enhance the real-world practicality of CTD, enabling robust real-time object tracking even in resource-constrained environments.
The versatility of the CTD framework was demonstrated through experiments with diverse object detection models, underscoring its ability to integrate with a wide range of computer vision systems. This flexibility suggests CTD could be a valuable tool for enhancing the efficiency and practicality of real-time object tracking in various applications.
Critical Analysis
The paper provides a thorough evaluation of the CTD approach, exploring the trade-offs between tracking speed and accuracy across different confidence thresholds. This level of nuance is commendable and helps to identify the optimal parameters for real-world deployment.
However, the paper does not delve deeply into the potential limitations or caveats of the CTD framework. For example, it would be interesting to understand how well CTD performs in scenarios with rapidly changing or occluded objects, which could challenge the assumptions of the tracker confidence-based approach.
Additionally, the paper does not address potential biases or edge cases that may arise when applying CTD to diverse object detection models. Further research could explore the robustness of the framework in the face of model-specific idiosyncrasies or performance variations.
While the results are promising, readers would benefit from a more critical examination of the approach's limitations and areas for future improvement. Encouraging a balanced perspective can help drive the field forward and inspire further innovation.
Conclusion
The Confidence-Triggered Detection (CTD) approach presented in this paper offers a compelling solution to the challenge of balancing speed and accuracy in real-time object tracking. By strategically bypassing object detection for similar frames and leveraging tracker confidence scores, CTD demonstrates significant performance improvements over existing algorithms.
The researchers' thorough evaluation and identification of an optimal speed-accuracy trade-off provide valuable insights for practical real-world deployment of the CTD framework. Moreover, the versatility of CTD, shown through its compatibility with diverse object detection models, suggests its potential to enable efficient, real-time object tracking in a wide range of applications and environments.
As the field of computer vision continues to advance, innovative approaches like CTD will play a crucial role in bridging the gap between the computational demands of deep learning and the need for practical, real-time performance. This research offers a promising step forward in that direction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔮
0
Confidence-Triggered Detection: Accelerating Real-time Tracking-by-detection Systems
Zhicheng Ding, Zhixin Lai, Siyang Li, Panfeng Li, Qikai Yang, Edward Wong
Real-time object tracking necessitates a delicate balance between speed and accuracy, a challenge exacerbated by the computational demands of deep learning methods. In this paper, we propose Confidence-Triggered Detection (CTD), an innovative approach that strategically bypasses object detection for frames closely resembling intermediate states, leveraging tracker confidence scores. CTD not only enhances tracking speed but also preserves accuracy, surpassing existing tracking algorithms. Through extensive evaluation across various tracker confidence thresholds, we identify an optimal trade-off between tracking speed and accuracy, providing crucial insights for parameter fine-tuning and enhancing CTD's practicality in real-world scenarios. Our experiments across diverse detection models underscore the robustness and versatility of the CTD framework, demonstrating its potential to enable real-time tracking in resource-constrained environments.
Read more9/17/2024

0
UTrack: Multi-Object Tracking with Uncertain Detections
Edgardo Solano-Carrillo, Felix Sattler, Antje Alex, Alexander Klein, Bruno Pereira Costa, Angel Bueno Rodriguez, Jannis Stoppe
The tracking-by-detection paradigm is the mainstream in multi-object tracking, associating tracks to the predictions of an object detector. Although exhibiting uncertainty through a confidence score, these predictions do not capture the entire variability of the inference process. For safety and security critical applications like autonomous driving, surveillance, etc., knowing this predictive uncertainty is essential though. Therefore, we introduce, for the first time, a fast way to obtain the empirical predictive distribution during object detection and incorporate that knowledge in multi-object tracking. Our mechanism can easily be integrated into state-of-the-art trackers, enabling them to fully exploit the uncertainty in the detections. Additionally, novel association methods are introduced that leverage the proposed mechanism. We demonstrate the effectiveness of our contribution on a variety of benchmarks, such as MOT17, MOT20, DanceTrack, and KITTI.
Read more9/2/2024
🔎
0
UncertaintyTrack: Exploiting Detection and Localization Uncertainty in Multi-Object Tracking
Chang Won Lee, Steven L. Waslander
Multi-object tracking (MOT) methods have seen a significant boost in performance recently, due to strong interest from the research community and steadily improving object detection methods. The majority of tracking methods follow the tracking-by-detection (TBD) paradigm, blindly trust the incoming detections with no sense of their associated localization uncertainty. This lack of uncertainty awareness poses a problem in safety-critical tasks such as autonomous driving where passengers could be put at risk due to erroneous detections that have propagated to downstream tasks, including MOT. While there are existing works in probabilistic object detection that predict the localization uncertainty around the boxes, no work in 2D MOT for autonomous driving has studied whether these estimates are meaningful enough to be leveraged effectively in object tracking. We introduce UncertaintyTrack, a collection of extensions that can be applied to multiple TBD trackers to account for localization uncertainty estimates from probabilistic object detectors. Experiments on the Berkeley Deep Drive MOT dataset show that the combination of our method and informative uncertainty estimates reduces the number of ID switches by around 19% and improves mMOTA by 2-3%. The source code is available at https://github.com/TRAILab/UncertaintyTrack
Read more5/1/2024
0
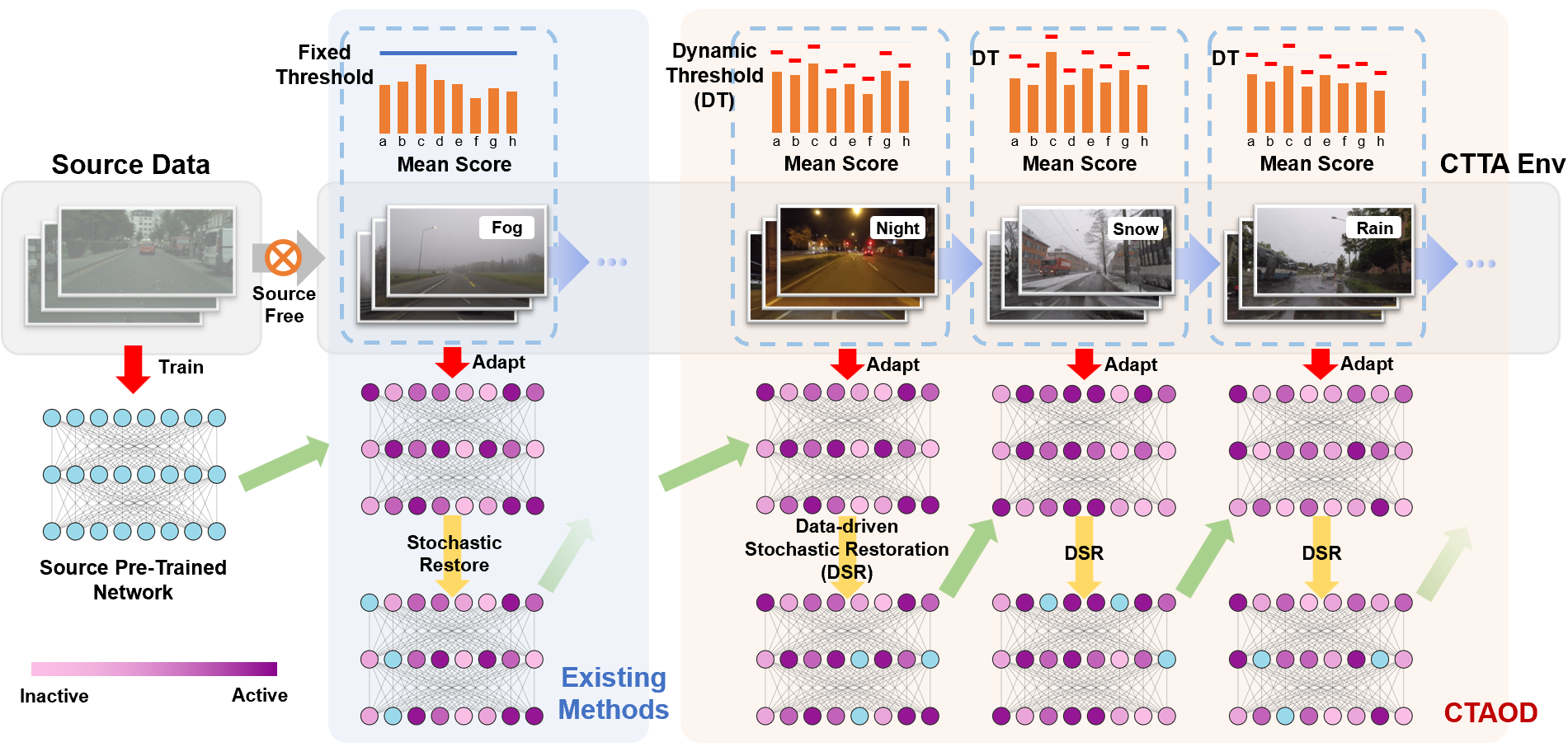
Exploring Test-Time Adaptation for Object Detection in Continually Changing Environments
Shilei Cao, Yan Liu, Juepeng Zheng, Weijia Li, Runmin Dong, Haohuan Fu
Real-world application models are commonly deployed in dynamic environments, where the target domain distribution undergoes temporal changes. Continual Test-Time Adaptation (CTTA) has recently emerged as a promising technique to gradually adapt a source-trained model to continually changing target domains. Despite recent advancements in addressing CTTA, two critical issues remain: 1) Fixed thresholds for pseudo-labeling in existing methodologies generate low-quality pseudo-labels, as model confidence varies across categories and domains; 2) Stochastic parameter restoration methods for mitigating catastrophic forgetting fail to effectively preserve critical information due to their intrinsic randomness. To tackle these challenges for detection models in CTTA scenarios, we present CTAOD, featuring three core components. Firstly, the object-level contrastive learning module extracts object-level features for contrastive learning to refine the feature representation in the target domain. Secondly, the adaptive monitoring module dynamically skips unnecessary adaptation and updates the category-specific threshold based on predicted confidence scores to enable efficiency and improve the quality of pseudo-labels. Lastly, the data-driven stochastic restoration mechanism selectively reset inactive parameters with higher possibilities, ensuring the retention of essential knowledge. We demonstrate the effectiveness of CTAOD on four CTTA object detection tasks, where CTAOD outperforms existing methods, especially achieving a 3.2 mAP improvement and a 20% increase in efficiency on the Cityscapes-to-Cityscapes-C CTTA task. The code will be released.
Read more8/20/2024