Continual Learning for Adaptable Car-Following in Dynamic Traffic Environments

0
Sign in to get full access
Overview
- Explores the challenge of continual learning for car-following models in dynamic traffic environments
- Proposes a novel approach to enable adaptable and continuously learning car-following behavior
- Demonstrates the model's ability to adapt to changing traffic conditions and driver preferences over time
Plain English Explanation
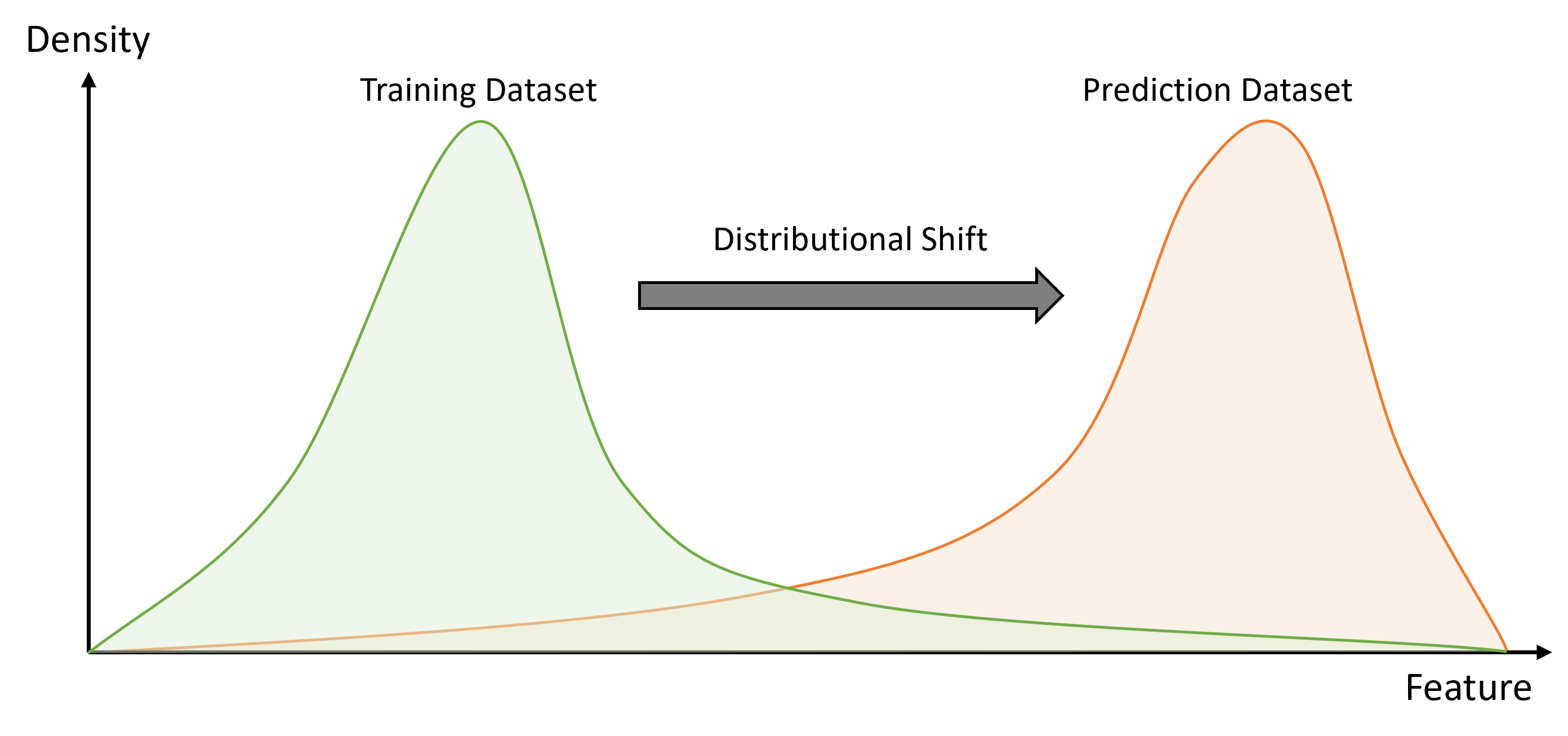
This research paper focuses on the challenge of developing car-following models that can adapt and learn continuously in dynamic traffic environments. Traditional car-following models often struggle to keep up with the constantly changing conditions on the road, such as varying driver behaviors, traffic patterns, and environmental factors.
The researchers propose a new approach that allows the car-following model to continually learn and adapt to these dynamic situations. This means the model can continuously update its behavior based on the latest driving data, rather than being stuck with a fixed set of rules.
By incorporating continual learning techniques, the model can learn and improve over time, becoming more personalized to the individual driver's preferences and the specific traffic conditions. This could lead to safer and more efficient automated driving systems that can seamlessly adjust to changing environments.
Technical Explanation
The researchers developed a continual learning framework for car-following models, which allows the model to adapt and update its behavior over time in response to dynamic traffic conditions.
The key components of their approach include:
-
Modular Architecture: The model is structured in a modular way, with separate components for perception, decision-making, and control. This allows for more targeted and efficient learning in each area.
-
Continual Learning Techniques: The researchers employ various continual learning methods, such as knowledge distillation and experience replay, to enable the model to learn and improve incrementally without forgetting past knowledge.
-
Adaptive Behavior: The model can dynamically adjust its car-following behavior, such as following distance and acceleration/deceleration patterns, to better suit the current traffic context and driver preferences.
Through extensive simulation experiments, the researchers demonstrate the effectiveness of their continual learning approach in enabling the car-following model to adapt and improve its performance over time, leading to safer and more efficient driving in dynamic environments.
Critical Analysis
The researchers acknowledge several limitations and areas for further research:
- The model's performance may be influenced by the quality and diversity of the training data, which can be difficult to obtain in real-world driving scenarios.
- The computational cost and memory requirements of the continual learning techniques could be a challenge for deployment in resource-constrained autonomous vehicles.
- The long-term effects of the model's adaptive behavior on traffic flow and safety need to be further investigated, as changes in individual car-following behavior can have broader systemic impacts.
Additionally, the researchers could have explored the ethical implications of continually adapting car-following models, such as the potential for biases or unintended consequences to arise as the model learns and evolves.
Conclusion
This research presents a promising approach for enabling adaptable and continuously learning car-following models in dynamic traffic environments. By incorporating continual learning techniques, the model can adapt and personalize its behavior to individual drivers and changing road conditions, potentially leading to safer and more efficient autonomous driving systems.
While the proposed framework has some limitations, the researchers' work highlights the importance of developing flexible and adaptive algorithms for complex, real-world applications like automated driving. Continued research in this area could have significant implications for the future of transportation and mobility.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Continual Learning for Adaptable Car-Following in Dynamic Traffic Environments
Xianda Chen, PakHin Tiu, Xu Han, Junjie Chen, Yuanfei Wu, Xinhu Zheng, Meixin Zhu
The continual evolution of autonomous driving technology requires car-following models that can adapt to diverse and dynamic traffic environments. Traditional learning-based models often suffer from performance degradation when encountering unseen traffic patterns due to a lack of continual learning capabilities. This paper proposes a novel car-following model based on continual learning that addresses this limitation. Our framework incorporates Elastic Weight Consolidation (EWC) and Memory Aware Synapses (MAS) techniques to mitigate catastrophic forgetting and enable the model to learn incrementally from new traffic data streams. We evaluate the performance of the proposed model on the Waymo and Lyft datasets which encompass various traffic scenarios. The results demonstrate that the continual learning techniques significantly outperform the baseline model, achieving 0% collision rates across all traffic conditions. This research contributes to the advancement of autonomous driving technology by fostering the development of more robust and adaptable car-following models.
Read more7/22/2024

0
EditFollower: Tunable Car Following Models for Customizable Adaptive Cruise Control Systems
Xianda Chen, Xu Han, Meixin Zhu, Xiaowen Chu, PakHin Tiu, Xinhu Zheng, Yinhai Wang
In the realm of driving technologies, fully autonomous vehicles have not been widely adopted yet, making advanced driver assistance systems (ADAS) crucial for enhancing driving experiences. Adaptive Cruise Control (ACC) emerges as a pivotal component of ADAS. However, current ACC systems often employ fixed settings, failing to intuitively capture drivers' social preferences and leading to potential function disengagement. To overcome these limitations, we propose the Editable Behavior Generation (EBG) model, a data-driven car-following model that allows for adjusting driving discourtesy levels. The framework integrates diverse courtesy calculation methods into long short-term memory (LSTM) and Transformer architectures, offering a comprehensive approach to capture nuanced driving dynamics. By integrating various discourtesy values during the training process, our model generates realistic agent trajectories with different levels of courtesy in car-following behavior. Experimental results on the HighD and Waymo datasets showcase a reduction in Mean Squared Error (MSE) of spacing and MSE of speed compared to baselines, establishing style controllability. To the best of our knowledge, this work represents the first data-driven car-following model capable of dynamically adjusting discourtesy levels. Our model provides valuable insights for the development of ACC systems that take into account drivers' social preferences.
Read more7/4/2024

0
Developing, Analyzing, and Evaluating Vehicular Lane Keeping Algorithms Under Dynamic Lighting and Weather Conditions Using Electric Vehicles
Michael Khalfin, Jack Volgren, Matthew Jones, Luke LeGoullon, Joshua Siegel, Chan-Jin Chung
Self-driving vehicles have the potential to reduce accidents and fatalities on the road. Many production vehicles already come equipped with basic self-driving capabilities, but have trouble following lanes in adverse lighting and weather conditions. Therefore, we develop, analyze, and evaluate two vehicular lane-keeping algorithms under dynamic weather conditions using a combined deep learning- and hand-crafted approach and an end-to-end deep learning approach. We use image segmentation- and linear-regression based deep learning to drive the vehicle toward the center of the lane, measuring the amount of laps completed, average speed, and average steering error per lap. Our hybrid model completes more laps than our end-to-end deep learning model. In the future, we are interested in combining our algorithms to form one cohesive approach to lane-following.
Read more6/12/2024
0
Continuously Learning, Adapting, and Improving: A Dual-Process Approach to Autonomous Driving
Jianbiao Mei, Yukai Ma, Xuemeng Yang, Licheng Wen, Xinyu Cai, Xin Li, Daocheng Fu, Bo Zhang, Pinlong Cai, Min Dou, Botian Shi, Liang He, Yong Liu, Yu Qiao
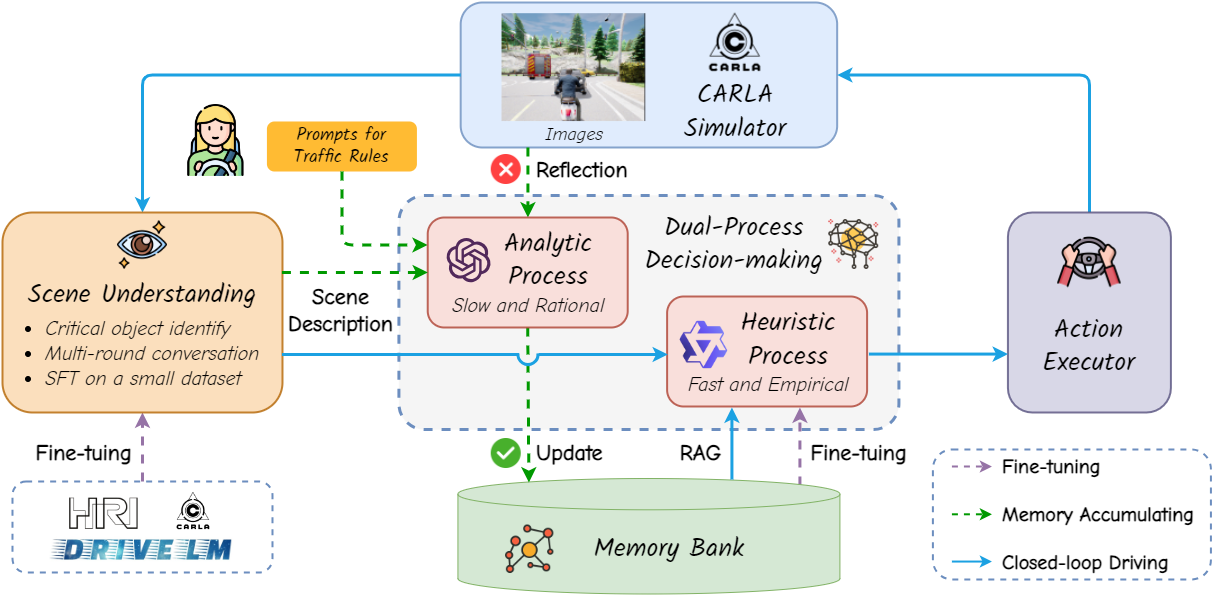
Autonomous driving has advanced significantly due to sensors, machine learning, and artificial intelligence improvements. However, prevailing methods struggle with intricate scenarios and causal relationships, hindering adaptability and interpretability in varied environments. To address the above problems, we introduce LeapAD, a novel paradigm for autonomous driving inspired by the human cognitive process. Specifically, LeapAD emulates human attention by selecting critical objects relevant to driving decisions, simplifying environmental interpretation, and mitigating decision-making complexities. Additionally, LeapAD incorporates an innovative dual-process decision-making module, which consists of an Analytic Process (System-II) for thorough analysis and reasoning, along with a Heuristic Process (System-I) for swift and empirical processing. The Analytic Process leverages its logical reasoning to accumulate linguistic driving experience, which is then transferred to the Heuristic Process by supervised fine-tuning. Through reflection mechanisms and a growing memory bank, LeapAD continuously improves itself from past mistakes in a closed-loop environment. Closed-loop testing in CARLA shows that LeapAD outperforms all methods relying solely on camera input, requiring 1-2 orders of magnitude less labeled data. Experiments also demonstrate that as the memory bank expands, the Heuristic Process with only 1.8B parameters can inherit the knowledge from a GPT-4 powered Analytic Process and achieve continuous performance improvement. Code will be released at https://github.com/PJLab-ADG/LeapAD.
Read more5/27/2024