Semantic-guided modeling of spatial relation and object co-occurrence for indoor scene recognition

0
👁️
Sign in to get full access
Overview
- Explores the importance of modeling semantic context in scene images for indoor scene recognition
- Identifies two key limitations in existing contextual modeling methods:
- They typically model only one type of spatial relationship among objects in a predefined manner, with limited exploration of diverse spatial layouts.
- They often overlook the differences in coexisting objects across different scenes, suppressing scene recognition performance.
- Proposes SpaCoNet, a method that simultaneously models spatial relations and co-occurrence of objects guided by semantic segmentation to overcome these limitations.
Plain English Explanation
When we look at a scene, such as a room in a building, we can recognize what type of room it is (e.g., a kitchen, bedroom, or living room) based on the objects and their spatial relationships within the scene. Exploiting Object-Based Segmentation for Semantic Features and Co-Occ Coupling: Explicit Feature Fusion for Video have shown that considering the relationships between objects and how they co-occur can improve scene recognition.
However, existing methods have some limitations. They typically only model one type of spatial relationship between objects, like how close they are to each other, and they don't fully account for the differences in the objects that can exist in different scenes, even if they are the same type of room. For example, a kitchen may have a stove, sink, and cabinets, while a different kitchen may have a microwave, table, and chairs.
To address these limitations, the researchers propose a new method called SpaCoNet. SpaCoNet has two key components:
- Semantic Spatial Relation Module (SSRM): This module uses information from semantic segmentation (which identifies the different objects in the scene) to thoroughly explore all the spatial relationships between the objects, going beyond just proximity.
- Global-Local Dependency Module: This module looks at both the spatial features from the SSRM and the deeper features of the objects themselves to distinguish how the same types of objects can co-occur differently in different scenes. This helps improve the recognition of the overall scene.
By combining these two components, SpaCoNet can better model the semantic context of a scene, leading to more accurate indoor scene recognition.
Technical Explanation
The proposed SpaCoNet model has three main components:
-
Semantic Spatial Relation Module (SSRM): This module uses semantic segmentation information to decouple the spatial information from the scene image and thoroughly explore all spatial relationships among objects in an end-to-end manner. This goes beyond the limited, predefined spatial relationships modeled by previous approaches. Mapping High-Level Semantic Regions in Indoor Environments and Spatial-Temporal Multi-Level Association for Video Object have shown the value of modeling diverse spatial relationships.
-
Image Feature Extraction Module: This module extracts deep features from the scene image, which are then allocated to each object along with the spatial features from the SSRM. This allows the model to distinguish the coexisting objects across different scenes, addressing the limitation of previous methods that overlooked such differences.
-
Global-Local Dependency Module: This module explores the long-range co-occurrence among objects using the discriminative features from the previous modules. It then generates a semantic-guided feature representation for indoor scene recognition.
The researchers evaluate SpaCoNet on three widely used scene datasets and demonstrate its effectiveness and generality in improving indoor scene recognition performance compared to existing methods.
Critical Analysis
The paper presents a comprehensive approach to modeling the semantic context of scene images for indoor scene recognition, addressing important limitations of previous methods. By simultaneously considering spatial relationships and object co-occurrence, SpaCoNet is able to better capture the diverse characteristics of different scenes.
One potential area for further research could be exploring the application of Real-Time 3D Semantic Occupancy Prediction for Autonomous techniques to enhance the spatial modeling capabilities of the SSRM. Additionally, investigating ways to further improve the model's ability to distinguish subtle differences in object co-occurrence across scenes could lead to even stronger scene recognition performance.
Overall, the SpaCoNet approach represents a meaningful step forward in the field of indoor scene recognition, and the insights and techniques presented in this paper could inspire further advancements in the future.
Conclusion
The paper proposes SpaCoNet, a novel method that simultaneously models the spatial relations and co-occurrence of objects within scene images, guided by semantic segmentation. By overcoming the limitations of previous contextual modeling approaches, SpaCoNet demonstrates improved performance in indoor scene recognition across multiple datasets.
The key contributions of this research are the Semantic Spatial Relation Module, which thoroughly explores diverse spatial relationships, and the Global-Local Dependency Module, which distinguishes the nuanced differences in object co-occurrence across scenes. These advancements in semantic context modeling have the potential to benefit a wide range of applications, from intelligent assistants and autonomous systems to augmented reality and smart home technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👁️
0
Semantic-guided modeling of spatial relation and object co-occurrence for indoor scene recognition
Chuanxin Song, Hanbo Wu, Xin Ma
Exploring the semantic context in scene images is essential for indoor scene recognition. However, due to the diverse intra-class spatial layouts and the coexisting inter-class objects, modeling contextual relationships to adapt various image characteristics is a great challenge. Existing contextual modeling methods for scene recognition exhibit two limitations: 1) They typically model only one type of spatial relationship (order or metric) among objects within scenes, with limited exploration of diverse spatial layouts. 2) They often overlook the differences in coexisting objects across different scenes, suppressing scene recognition performance. To overcome these limitations, we propose SpaCoNet, which simultaneously models Spatial relation and Co-occurrence of objects guided by semantic segmentation. Firstly, the Semantic Spatial Relation Module (SSRM) is constructed to model scene spatial features. With the help of semantic segmentation, this module decouples spatial information from the scene image and thoroughly explores all spatial relationships among objects in an end-to-end manner, thereby obtaining semantic-based spatial features. Secondly, both spatial features from the SSRM and deep features from the Image Feature Extraction Module are allocated to each object, so as to distinguish the coexisting object across different scenes. Finally, utilizing the discriminative features above, we design a Global-Local Dependency Module to explore the long-range co-occurrence among objects, and further generate a semantic-guided feature representation for indoor scene recognition. Experimental results on three widely used scene datasets demonstrate the effectiveness and generality of the proposed method.
Read more8/9/2024
0
Exploiting Object-based and Segmentation-based Semantic Features for Deep Learning-based Indoor Scene Classification
Ricardo Pereira, Lu'is Garrote, Tiago Barros, Ana Lopes, Urbano J. Nunes
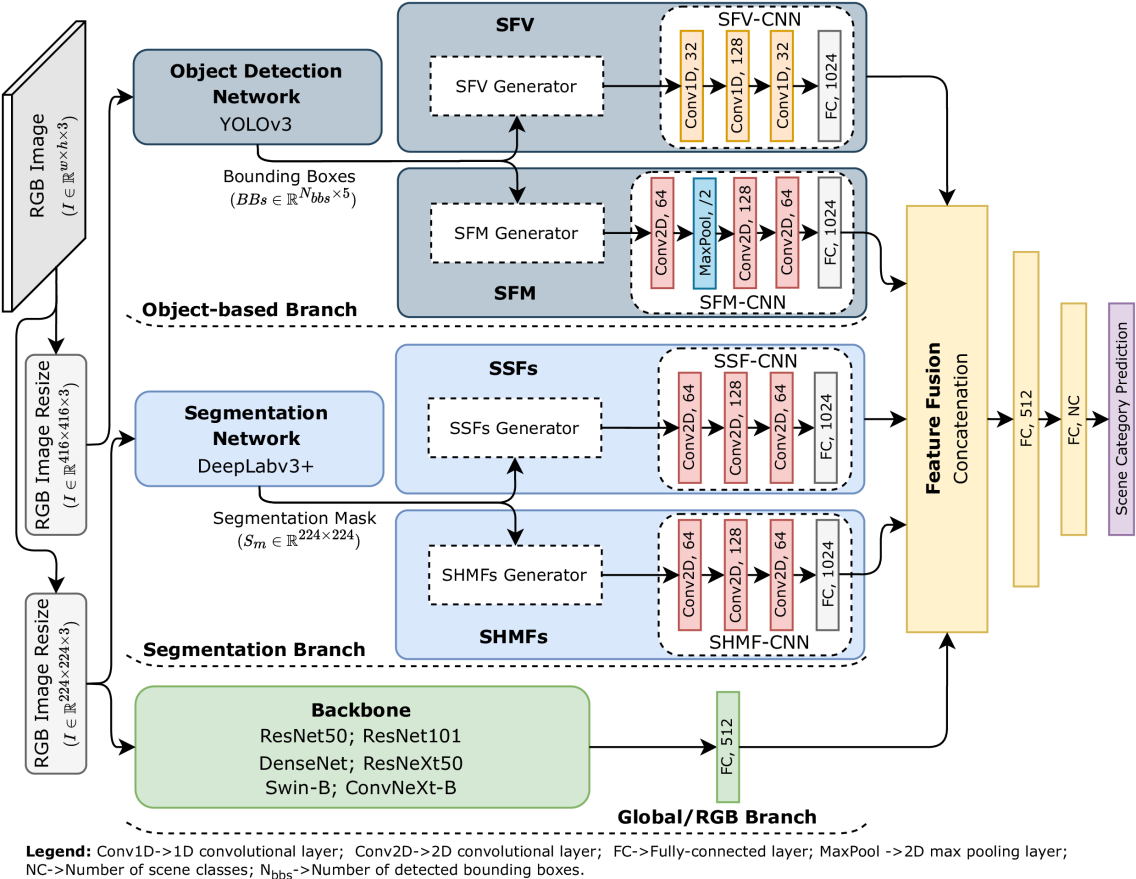
Indoor scenes are usually characterized by scattered objects and their relationships, which turns the indoor scene classification task into a challenging computer vision task. Despite the significant performance boost in classification tasks achieved in recent years, provided by the use of deep-learning-based methods, limitations such as inter-category ambiguity and intra-category variation have been holding back their performance. To overcome such issues, gathering semantic information has been shown to be a promising source of information towards a more complete and discriminative feature representation of indoor scenes. Therefore, the work described in this paper uses both semantic information, obtained from object detection, and semantic segmentation techniques. While object detection techniques provide the 2D location of objects allowing to obtain spatial distributions between objects, semantic segmentation techniques provide pixel-level information that allows to obtain, at a pixel-level, a spatial distribution and shape-related features of the segmentation categories. Hence, a novel approach that uses a semantic segmentation mask to provide Hu-moments-based segmentation categories' shape characterization, designated by Segmentation-based Hu-Moments Features (SHMFs), is proposed. Moreover, a three-main-branch network, designated by GOS$^2$F$^2$App, that exploits deep-learning-based global features, object-based features, and semantic segmentation-based features is also proposed. GOS$^2$F$^2$App was evaluated in two indoor scene benchmark datasets: SUN RGB-D and NYU Depth V2, where, to the best of our knowledge, state-of-the-art results were achieved on both datasets, which present evidences of the effectiveness of the proposed approach.
Read more4/12/2024

0
Non-parametric Contextual Relationship Learning for Semantic Video Object Segmentation
Tinghuai Wang, Huiling Wang
We propose a novel approach for modeling semantic contextual relationships in videos. This graph-based model enables the learning and propagation of higher-level spatial-temporal contexts to facilitate the semantic labeling of local regions. We introduce an exemplar-based nonparametric view of contextual cues, where the inherent relationships implied by object hypotheses are encoded on a similarity graph of regions. Contextual relationships learning and propagation are performed to estimate the pairwise contexts between all pairs of unlabeled local regions. Our algorithm integrates the learned contexts into a Conditional Random Field (CRF) in the form of pairwise potentials and infers the per-region semantic labels. We evaluate our approach on the challenging YouTube-Objects dataset which shows that the proposed contextual relationship model outperforms the state-of-the-art methods.
Read more7/9/2024

0
Learning Spatial-Semantic Features for Robust Video Object Segmentation
Xin Li, Deshui Miao, Zhenyu He, Yaowei Wang, Huchuan Lu, Ming-Hsuan Yang
Tracking and segmenting multiple similar objects with complex or separate parts in long-term videos is inherently challenging due to the ambiguity of target parts and identity confusion caused by occlusion, background clutter, and long-term variations. In this paper, we propose a robust video object segmentation framework equipped with spatial-semantic features and discriminative object queries to address the above issues. Specifically, we construct a spatial-semantic network comprising a semantic embedding block and spatial dependencies modeling block to associate the pretrained ViT features with global semantic features and local spatial features, providing a comprehensive target representation. In addition, we develop a masked cross-attention module to generate object queries that focus on the most discriminative parts of target objects during query propagation, alleviating noise accumulation and ensuring effective long-term query propagation. The experimental results show that the proposed method set a new state-of-the-art performance on multiple datasets, including the DAVIS2017 test (89.1%), YoutubeVOS 2019 (88.5%), MOSE (75.1%), LVOS test (73.0%), and LVOS val (75.1%), which demonstrate the effectiveness and generalization capacity of the proposed method. We will make all source code and trained models publicly available.
Read more7/11/2024