CPS-LLM: Large Language Model based Safe Usage Plan Generator for Human-in-the-Loop Human-in-the-Plant Cyber-Physical System

0

Sign in to get full access
Overview
- This paper presents CPS-LLM, a large language model-based system for generating safe usage plans for human-in-the-loop, human-in-the-plant cyber-physical systems (CPS).
- The goal is to create an AI-powered tool that can help humans operate complex CPS safely and effectively.
- The system uses large language models to understand the specific CPS, its operational constraints, and the user's goals, and then generates a customized usage plan.
Plain English Explanation
CPS, or cyber-physical systems, are complex machines that combine digital controls with physical components. They are used in many industries, like manufacturing, energy, and transportation. These systems often require human operators to monitor and control them.
Safely operating a CPS can be challenging, as there are many factors to consider, such as equipment limitations, safety protocols, and the user's own capabilities. CPS-LLM: Large Language Model based Safe Usage Plan Generator for Human-in-the-Loop Human-in-the-Plant Cyber-Physical System aims to address this by using a large language model to generate customized usage plans.
The language model is trained on information about the specific CPS, its constraints, and best practices for safe operation. When a human user needs to interact with the CPS, they can input their goals and the system will generate a step-by-step plan that helps them achieve their objectives while staying within the safety limits of the equipment.
This approach leverages the natural language processing capabilities of large language models to bridge the gap between the complex technical details of the CPS and the human user's needs. By providing a tailored usage plan, the system can help reduce the risk of accidents or equipment damage, making the CPS safer and more accessible for human operators.
Technical Explanation
The CPS-LLM system uses a large language model as the core component for generating safe usage plans. The language model is trained on a dataset that includes information about the specific CPS, such as its physical and digital components, operational constraints, and safety protocols.
When a human user needs to interact with the CPS, they provide the system with their goals and the current state of the CPS. The language model then processes this information and generates a step-by-step plan that outlines the actions the user should take to achieve their objectives while staying within the safety limits of the equipment.
The architecture of CPS-LLM includes several key components:
- CPS knowledge base: A structured database containing information about the specific CPS, including its components, operational constraints, and safety protocols.
- Language model: A large, pre-trained language model that can understand natural language inputs and generate relevant responses.
- Usage plan generator: A module that takes the user's goals and the CPS state as input, and uses the language model to generate a customized usage plan.
The system is designed to be flexible and adaptable, allowing it to be used with a variety of different CPS systems. The language model can be fine-tuned or retrained with new data to accommodate changes in the CPS or the user's requirements.
Critical Analysis
The CPS-LLM approach presents a promising solution for improving the safety and usability of complex cyber-physical systems. By leveraging the capabilities of large language models, the system can generate tailored usage plans that are more accessible and understandable for human operators.
However, the paper acknowledges several potential limitations and areas for further research:
- The effectiveness of the system may depend on the quality and comprehensiveness of the CPS knowledge base. If the data is incomplete or inaccurate, the generated usage plans may not be reliable.
- The system's ability to handle dynamic or unexpected situations in the CPS may be limited, as it relies on pre-defined knowledge and models.
- The paper does not provide empirical evaluation of the system's performance or user experience, which would be important for assessing its real-world impact.
To address these challenges, future research could explore ways to improve the language model's reasoning capabilities, integrate more dynamic data sources, and conduct user studies to optimize the system's design and usability.
Conclusion
The CPS-LLM system represents an innovative approach to enhancing the safety and usability of complex cyber-physical systems. By leveraging large language models to generate customized usage plans, the system can help bridge the gap between the technical details of the CPS and the needs of human operators.
This technology has the potential to significantly improve the accessibility and safety of CPS in a wide range of industries, from manufacturing to transportation. As the capabilities of large language models continue to evolve, the CPS-LLM approach could serve as a valuable tool for empowering humans to interact with complex machinery more effectively and safely.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CPS-LLM: Large Language Model based Safe Usage Plan Generator for Human-in-the-Loop Human-in-the-Plant Cyber-Physical System
Ayan Banerjee, Aranyak Maity, Payal Kamboj, Sandeep K. S. Gupta
We explore the usage of large language models (LLM) in human-in-the-loop human-in-the-plant cyber-physical systems (CPS) to translate a high-level prompt into a personalized plan of actions, and subsequently convert that plan into a grounded inference of sequential decision-making automated by a real-world CPS controller to achieve a control goal. We show that it is relatively straightforward to contextualize an LLM so it can generate domain-specific plans. However, these plans may be infeasible for the physical system to execute or the plan may be unsafe for human users. To address this, we propose CPS-LLM, an LLM retrained using an instruction tuning framework, which ensures that generated plans not only align with the physical system dynamics of the CPS but are also safe for human users. The CPS-LLM consists of two innovative components: a) a liquid time constant neural network-based physical dynamics coefficient estimator that can derive coefficients of dynamical models with some unmeasured state variables; b) the model coefficients are then used to train an LLM with prompts embodied with traces from the dynamical system and the corresponding model coefficients. We show that when the CPS-LLM is integrated with a contextualized chatbot such as BARD it can generate feasible and safe plans to manage external events such as meals for automated insulin delivery systems used by Type 1 Diabetes subjects.
Read more5/21/2024
0
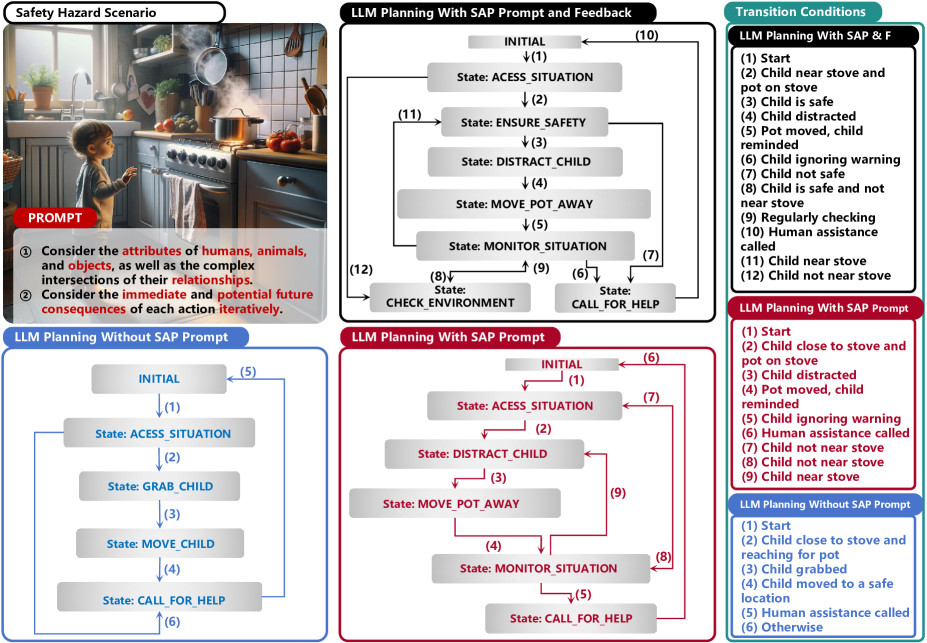
LLM-SAP: Large Language Models Situational Awareness Based Planning
Liman Wang, Hanyang Zhong
This study explores integrating large language models (LLMs) with situational awareness-based planning (SAP) to enhance the decision-making capabilities of AI agents in dynamic and uncertain environments. We employ a multi-agent reasoning framework to develop a methodology that anticipates and actively mitigates potential risks through iterative feedback and evaluation processes. Our approach diverges from traditional automata theory by incorporating the complexity of human-centric interactions into the planning process, thereby expanding the planning scope of LLMs beyond structured and predictable scenarios. The results demonstrate significant improvements in the model's ability to provide comparative safe actions within hazard interactions, offering a perspective on proactive and reactive planning strategies. This research highlights the potential of LLMs to perform human-like action planning, thereby paving the way for more sophisticated, reliable, and safe AI systems in unpredictable real-world applications.
Read more6/18/2024
💬
0
Control Industrial Automation System with Large Language Models
Yuchen Xia, Nasser Jazdi, Jize Zhang, Chaitanya Shah, Michael Weyrich
Traditional industrial automation systems require specialized expertise to operate and complex reprogramming to adapt to new processes. Large language models offer the intelligence to make them more flexible and easier to use. However, LLMs' application in industrial settings is underexplored. This paper introduces a framework for integrating LLMs to achieve end-to-end control of industrial automation systems. At the core of the framework are an agent system designed for industrial tasks, a structured prompting method, and an event-driven information modeling mechanism that provides real-time data for LLM inference. The framework supplies LLMs with real-time events on different context semantic levels, allowing them to interpret the information, generate production plans, and control operations on the automation system. It also supports structured dataset creation for fine-tuning on this downstream application of LLMs. Our contribution includes a formal system design, proof-of-concept implementation, and a method for generating task-specific datasets for LLM fine-tuning and testing. This approach enables a more adaptive automation system that can respond to spontaneous events, while allowing easier operation and configuration through natural language for more intuitive human-machine interaction. We provide demo videos and detailed data on GitHub: https://github.com/YuchenXia/LLM4IAS
Read more9/27/2024
💬
0
Incorporating Large Language Models into Production Systems for Enhanced Task Automation and Flexibility
Yuchen Xia, Jize Zhang, Nasser Jazdi, Michael Weyrich
This paper introduces a novel approach to integrating large language model (LLM) agents into automated production systems, aimed at enhancing task automation and flexibility. We organize production operations within a hierarchical framework based on the automation pyramid. Atomic operation functionalities are modeled as microservices, which are executed through interface invocation within a dedicated digital twin system. This allows for a scalable and flexible foundation for orchestrating production processes. In this digital twin system, low-level, hardware-specific data is semantically enriched and made interpretable for LLMs for production planning and control tasks. Large language model agents are systematically prompted to interpret these production-specific data and knowledge. Upon receiving a user request or identifying a triggering event, the LLM agents generate a process plan. This plan is then decomposed into a series of atomic operations, executed as microservices within the real-world automation system. We implement this overall approach on an automated modular production facility at our laboratory, demonstrating how the LLMs can handle production planning and control tasks through a concrete case study. This results in an intuitive production facility with higher levels of task automation and flexibility. Finally, we reveal the several limitations in realizing the full potential of the large language models in autonomous systems and point out promising benefits. Demos of this series of ongoing research series can be accessed at: https://github.com/YuchenXia/GPT4IndustrialAutomation
Read more7/12/2024