Deep Single Image Camera Calibration by Heatmap Regression to Recover Fisheye Images Under Manhattan World Assumption

0
🤿
Sign in to get full access
Overview
- The paper proposes a learning-based method for accurate and robust camera angle estimation from fisheye images in a Manhattan world environment.
- It introduces the use of heatmap regression, similar to pose estimation using keypoints, to detect the directions of labeled image coordinates.
- The method recovers the rotation and removes fisheye distortion without relying on vanishing-point constraints, which are often lacking in general scene images.
- The paper demonstrates that the proposed method outperforms conventional approaches on large-scale datasets and with off-the-shelf cameras.
Plain English Explanation
The paper discusses a new way to estimate the camera angle, or orientation, from fisheye images in a specific type of environment known as a "Manhattan world." In a Manhattan world, the buildings and structures are arranged in a grid-like pattern, similar to the layout of streets in Manhattan, New York.
Estimating the camera angle from fisheye images can be challenging because these images often lack the clear lines, arcs, and vanishing points that are typically used to determine the angle. To overcome this, the researchers developed a learning-based calibration method that uses something called "heatmap regression."
Heatmap regression is similar to how pose estimation works, where the system learns to identify the location of key points, like the joints in a person's body. In this case, the system learns to identify the directions of certain points in the image, rather than just their locations.
By doing this, the system can recover the camera's rotation and remove the fisheye distortion, all without needing to rely on the vanishing points that are often missing in general scene images. To help compensate for the lack of vanishing points, the researchers also introduced some auxiliary diagonal points that are arranged in a specific 3D pattern.
The researchers tested their method on large datasets and with off-the-shelf cameras, and found that it outperformed conventional methods for estimating camera angle from fisheye images in a Manhattan world environment.
Technical Explanation
The paper presents a learning-based calibration method for accurate and robust camera angle estimation from fisheye images in a Manhattan world environment. The key innovation is the use of heatmap regression, which is similar to pose estimation using keypoints, to detect the directions of labeled image coordinates.
Unlike conventional methods that rely on vanishing-point constraints, the proposed approach adapts CNNs to fisheye cameras without retraining and recovers the rotation while simultaneously removing fisheye distortion. To compensate for the lack of vanishing points in general scene images, the researchers introduced auxiliary diagonal points with an optimal 3D arrangement of spatial uniformity.
Extensive experiments on large-scale datasets and with off-the-shelf cameras demonstrated that the proposed method outperforms conventional techniques for camera angle estimation in Manhattan world environments.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated approach to a challenging problem in computer vision. The use of heatmap regression for direction estimation, rather than relying on vanishing points, is a clever solution to the limitations of fisheye images in Manhattan world scenes.
One potential limitation of the research is the specific focus on Manhattan world environments. While this is a useful and common scenario, it would be interesting to see how the method might perform in more general, unconstrained scenes. Additionally, the paper does not provide much detail on the architectural choices or training procedures for the learning-based components, which could make it difficult to replicate the results.
Overall, the paper makes a valuable contribution to the field of camera calibration and orientation estimation, particularly for applications involving fisheye lenses and urban environments. The proposed method represents a significant advancement over conventional techniques and could have important implications for a wide range of computer vision tasks, such as 3D reconstruction, panoramic image stitching, and augmented reality.
Conclusion
The paper presents a novel learning-based approach for accurate and robust camera angle estimation from fisheye images in a Manhattan world environment. By using heatmap regression to detect the directions of labeled image coordinates, the method can recover the camera's rotation and remove fisheye distortion without relying on vanishing-point constraints, which are often lacking in general scene images.
The extensive experimental results demonstrate the effectiveness of the proposed technique, which outperforms conventional methods on large-scale datasets and with off-the-shelf cameras. This work represents an important advancement in the field of computer vision, with potential applications in a wide range of areas, from 3D reconstruction and panoramic image stitching to augmented reality and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
0
Deep Single Image Camera Calibration by Heatmap Regression to Recover Fisheye Images Under Manhattan World Assumption
Nobuhiko Wakai, Satoshi Sato, Yasunori Ishii, Takayoshi Yamashita
A Manhattan world lying along cuboid buildings is useful for camera angle estimation. However, accurate and robust angle estimation from fisheye images in the Manhattan world has remained an open challenge because general scene images tend to lack constraints such as lines, arcs, and vanishing points. To achieve higher accuracy and robustness, we propose a learning-based calibration method that uses heatmap regression, which is similar to pose estimation using keypoints, to detect the directions of labeled image coordinates. Simultaneously, our two estimators recover the rotation and remove fisheye distortion by remapping from a general scene image. Without considering vanishing-point constraints, we find that additional points for learning-based methods can be defined. To compensate for the lack of vanishing points in images, we introduce auxiliary diagonal points that have the optimal 3D arrangement of spatial uniformity. Extensive experiments demonstrated that our method outperforms conventional methods on large-scale datasets and with off-the-shelf cameras.
Read more9/23/2024
🖼️
0
Location-guided Head Pose Estimation for Fisheye Image
Bing Li, Dong Zhang, Cheng Huang, Yun Xian, Ming Li, Dah-Jye Lee
Camera with a fisheye or ultra-wide lens covers a wide field of view that cannot be modeled by the perspective projection. Serious fisheye lens distortion in the peripheral region of the image leads to degraded performance of the existing head pose estimation models trained on undistorted images. This paper presents a new approach for head pose estimation that uses the knowledge of head location in the image to reduce the negative effect of fisheye distortion. We develop an end-to-end convolutional neural network to estimate the head pose with the multi-task learning of head pose and head location. Our proposed network estimates the head pose directly from the fisheye image without the operation of rectification or calibration. We also created a fisheye-distorted version of the three popular head pose estimation datasets, BIWI, 300W-LP, and AFLW2000 for our experiments. Experiments results show that our network remarkably improves the accuracy of head pose estimation compared with other state-of-the-art one-stage and two-stage methods.
Read more4/11/2024
🌀
0
Single-image camera calibration with model-free distortion correction
Katia Genovese
Camera calibration is a process of paramount importance in computer vision applications that require accurate quantitative measurements. The popular method developed by Zhang relies on the use of a large number of images of a planar grid of fiducial points captured in multiple poses. Although flexible and easy to implement, Zhang's method has some limitations. The simultaneous optimization of the entire parameter set, including the coefficients of a predefined distortion model, may result in poor distortion correction at the image boundaries or in miscalculation of the intrinsic parameters, even with a reasonably small reprojection error. Indeed, applications involving image stitching (e.g. multi-camera systems) require accurate mapping of distortion up to the outermost regions of the image. Moreover, intrinsic parameters affect the accuracy of camera pose estimation, which is fundamental for applications such as vision servoing in robot navigation and automated assembly. This paper proposes a method for estimating the complete set of calibration parameters from a single image of a planar speckle pattern covering the entire sensor. The correspondence between image points and physical points on the calibration target is obtained using Digital Image Correlation. The effective focal length and the extrinsic parameters are calculated separately after a prior evaluation of the principal point. At the end of the procedure, a dense and uniform model-free distortion map is obtained over the entire image. Synthetic data with different noise levels were used to test the feasibility of the proposed method and to compare its metrological performance with Zhang's method. Real-world tests demonstrate the potential of the developed method to reveal aspects of the image formation that are hidden by averaging over multiple images.
Read more6/26/2024
0
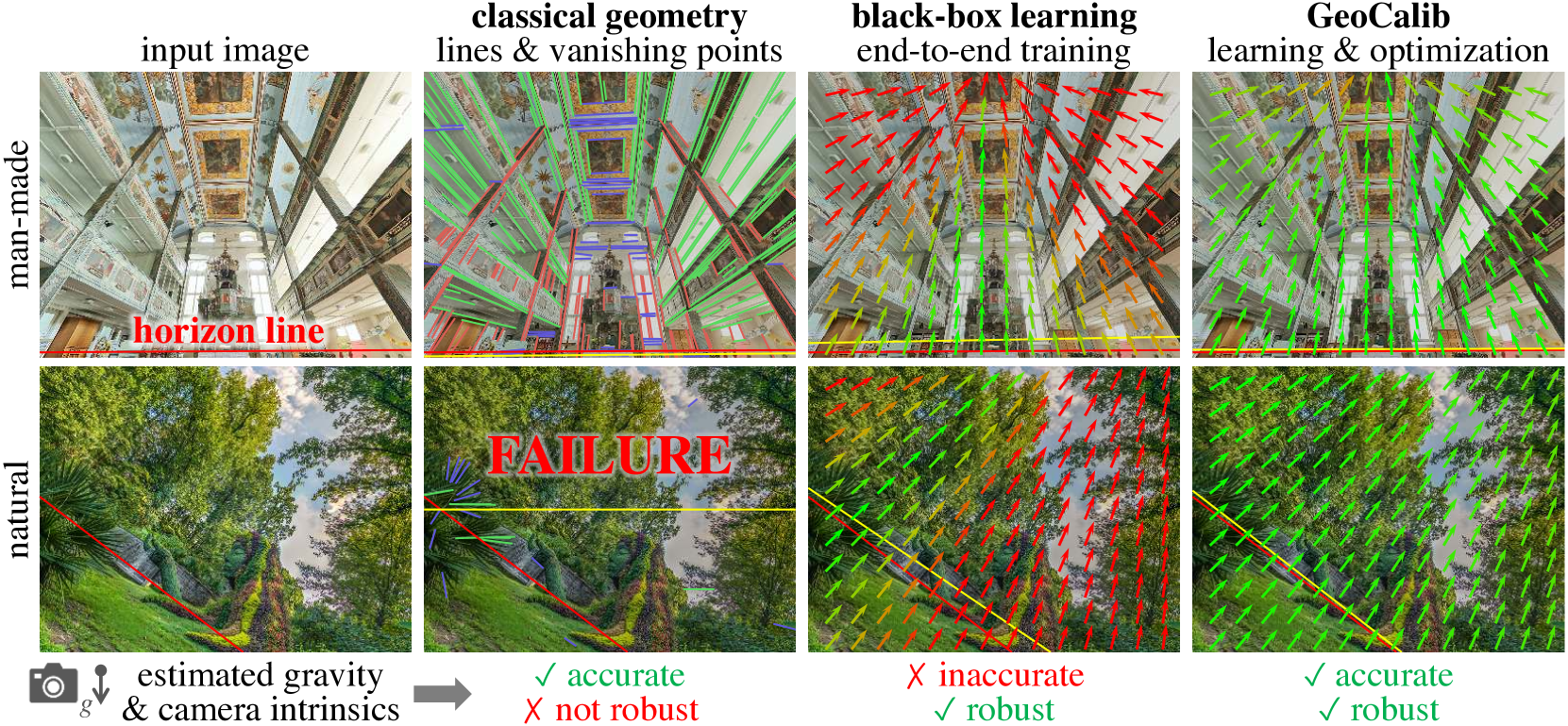
GeoCalib: Learning Single-image Calibration with Geometric Optimization
Alexander Veicht, Paul-Edouard Sarlin, Philipp Lindenberger, Marc Pollefeys
From a single image, visual cues can help deduce intrinsic and extrinsic camera parameters like the focal length and the gravity direction. This single-image calibration can benefit various downstream applications like image editing and 3D mapping. Current approaches to this problem are based on either classical geometry with lines and vanishing points or on deep neural networks trained end-to-end. The learned approaches are more robust but struggle to generalize to new environments and are less accurate than their classical counterparts. We hypothesize that they lack the constraints that 3D geometry provides. In this work, we introduce GeoCalib, a deep neural network that leverages universal rules of 3D geometry through an optimization process. GeoCalib is trained end-to-end to estimate camera parameters and learns to find useful visual cues from the data. Experiments on various benchmarks show that GeoCalib is more robust and more accurate than existing classical and learned approaches. Its internal optimization estimates uncertainties, which help flag failure cases and benefit downstream applications like visual localization. The code and trained models are publicly available at https://github.com/cvg/GeoCalib.
Read more9/11/2024