Delving into the Trajectory Long-tail Distribution for Muti-object Tracking

0
🐍
Sign in to get full access
Overview
- The paper examines the nature of tracking data in the field of multiple object tracking (MOT) within computer vision.
- It identifies a long-tail distribution issue in existing MOT datasets, where there is a significant imbalance in the distribution of trajectory lengths across different pedestrians.
- The paper proposes two data augmentation strategies and a Group Softmax (GS) module to address this challenge and improve MOT performance.
Plain English Explanation
The paper looks at the data used in multiple object tracking (MOT), which is an important area of computer vision with many practical applications. Researchers have mainly focused on improving tracking algorithms and post-processing techniques, but the paper's authors noticed an issue with the tracking data itself.
They found that in existing MOT datasets, there is a big difference in the lengths of the tracked paths for different people. Some people have short tracked paths, while others have much longer ones. This "long-tail distribution" of trajectory lengths can cause problems for tracking systems.
To address this, the authors come up with two new data augmentation strategies. The first, Stationary Camera View Data Augmentation (SVA), backtrack and predict the paths of people with short tracked paths. The second, Dynamic Camera View Data Augmentation (DVA), uses a diffusion model to change the background of the scene and create more varied training data.
They also introduce a Group Softmax (GS) module that groups people into unrelated sets and performs the softmax operation on each group separately. This helps the system better handle the imbalance in trajectory lengths.
The authors show that integrating these techniques into existing MOT systems can improve their performance in dealing with the long-tail distribution problem.
Technical Explanation
The paper starts by noting that while research in multiple object tracking (MOT) has primarily focused on developing new tracking algorithms and enhancing post-processing techniques, there has been a lack of thorough examination of the nature of the tracking data itself.
Through their analysis, the authors identify a pronounced "long-tail distribution issue" in existing MOT datasets, where there is a significant imbalance in the distribution of trajectory lengths across different pedestrians. They refer to this phenomenon as the "pedestrians trajectory long-tail distribution".
To address this challenge, the authors propose two data augmentation strategies:
-
Stationary Camera View Data Augmentation (SVA): This technique backtrack and predict the pedestrian trajectory of "tail classes" (i.e., those with short tracked paths) to generate more diverse training data.
-
Dynamic Camera View Data Augmentation (DVA): This method uses a diffusion model to change the background of the scene, creating additional variations in the training data.
In addition, the authors introduce a Group Softmax (GS) module that divides the pedestrians into unrelated groups and performs the softmax operation on each group individually. This helps the system better handle the imbalance in trajectory lengths.
The authors demonstrate through extensive experimentation that their proposed strategies can be integrated into numerous existing tracking systems, effectively reducing the influence of the long-tail distribution on multi-object tracking performance.
Critical Analysis
The paper's focus on addressing the long-tail distribution issue in MOT datasets is a valuable contribution to the field. By identifying this challenge and proposing targeted solutions, the authors highlight an important aspect of tracking data that has not received sufficient attention in the past.
However, the paper could have provided more details on the potential limitations or caveats of the proposed techniques. For example, it would be helpful to understand how the data augmentation strategies and the Group Softmax module perform in scenarios with different levels of long-tail distribution severity, or how they might interact with other tracking system components.
Additionally, the paper could have discussed potential drawbacks or edge cases where the proposed methods might not be as effective, or areas for further research to address any remaining challenges in handling long-tail distribution issues in MOT.
Conclusion
The paper presents a novel exploration into the distribution patterns of tracking data in the context of multiple object tracking (MOT) within computer vision. It identifies a significant long-tail distribution issue in existing MOT datasets, where there is a pronounced imbalance in the distribution of trajectory lengths across different pedestrians.
To address this challenge, the authors introduce two data augmentation strategies, Stationary Camera View Data Augmentation (SVA) and Dynamic Camera View Data Augmentation (DVA), as well as a Group Softmax (GS) module. These techniques can be integrated into various existing tracking systems to mitigate the influence of the long-tail distribution on MOT performance.
The paper's findings and proposed solutions have the potential to drive further research and improvements in the field of multiple object tracking, ultimately leading to more robust and accurate tracking systems with practical applications in areas such as surveillance, autonomous vehicles, and human-computer interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🐍
0
Delving into the Trajectory Long-tail Distribution for Muti-object Tracking
Sijia Chen, En Yu, Jinyang Li, Wenbing Tao
Multiple Object Tracking (MOT) is a critical area within computer vision, with a broad spectrum of practical implementations. Current research has primarily focused on the development of tracking algorithms and enhancement of post-processing techniques. Yet, there has been a lack of thorough examination concerning the nature of tracking data it self. In this study, we pioneer an exploration into the distribution patterns of tracking data and identify a pronounced long-tail distribution issue within existing MOT datasets. We note a significant imbalance in the distribution of trajectory lengths across different pedestrians, a phenomenon we refer to as ``pedestrians trajectory long-tail distribution''. Addressing this challenge, we introduce a bespoke strategy designed to mitigate the effects of this skewed distribution. Specifically, we propose two data augmentation strategies, including Stationary Camera View Data Augmentation (SVA) and Dynamic Camera View Data Augmentation (DVA) , designed for viewpoint states and the Group Softmax (GS) module for Re-ID. SVA is to backtrack and predict the pedestrian trajectory of tail classes, and DVA is to use diffusion model to change the background of the scene. GS divides the pedestrians into unrelated groups and performs softmax operation on each group individually. Our proposed strategies can be integrated into numerous existing tracking systems, and extensive experimentation validates the efficacy of our method in reducing the influence of long-tail distribution on multi-object tracking performance. The code is available at https://github.com/chen-si-jia/Trajectory-Long-tail-Distribution-for-MOT.
Read more5/27/2024
0
AMEND: A Mixture of Experts Framework for Long-tailed Trajectory Prediction
Ray Coden Mercurius, Ehsan Ahmadi, Soheil Mohamad Alizadeh Shabestary, Amir Rasouli
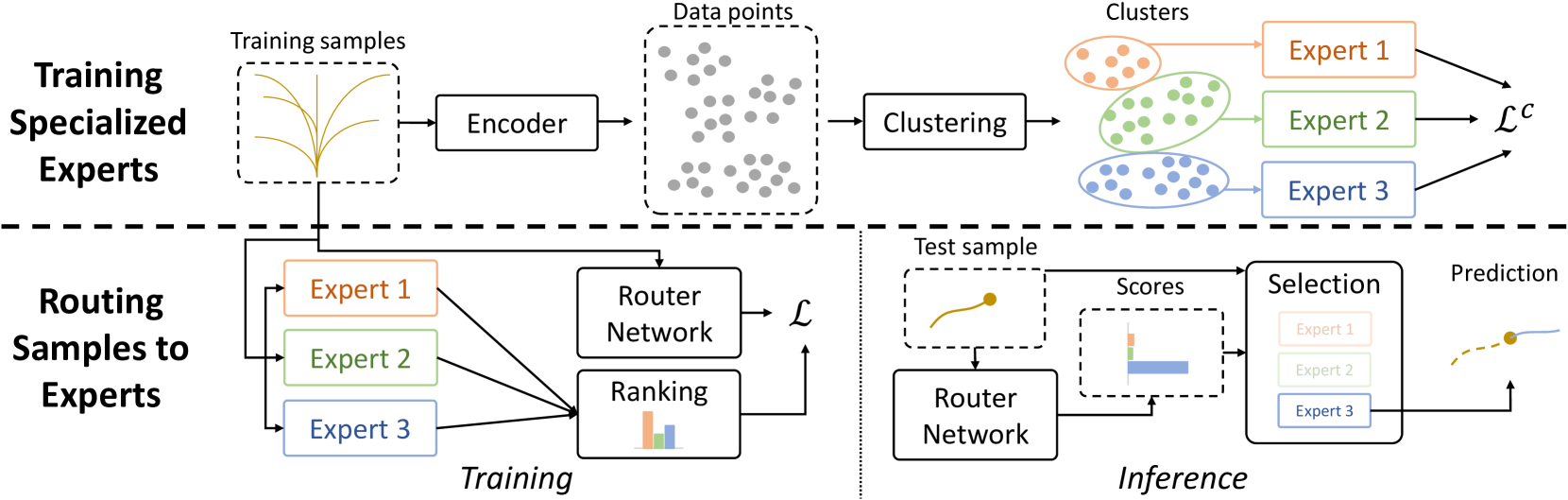
Accurate prediction of pedestrians' future motions is critical for intelligent driving systems. Developing models for this task requires rich datasets containing diverse sets of samples. However, the existing naturalistic trajectory prediction datasets are generally imbalanced in favor of simpler samples and lack challenging scenarios. Such a long-tail effect causes prediction models to underperform on the tail portion of the data distribution containing safety-critical scenarios. Previous methods tackle the long-tail problem using methods such as contrastive learning and class-conditioned hypernetworks. These approaches, however, are not modular and cannot be applied to many machine learning architectures. In this work, we propose a modular model-agnostic framework for trajectory prediction that leverages a specialized mixture of experts. In our approach, each expert is trained with a specialized skill with respect to a particular part of the data. To produce predictions, we utilise a router network that selects the best expert by generating relative confidence scores. We conduct experimentation on common pedestrian trajectory prediction datasets and show that our method improves performance on long-tail scenarios. We further conduct ablation studies to highlight the contribution of different proposed components.
Read more4/30/2024
✅
0
MAML MOT: Multiple Object Tracking based on Meta-Learning
Jiayi Chen, Chunhua Deng
With the advancement of video analysis technology, the multi-object tracking (MOT) problem in complex scenes involving pedestrians is gaining increasing importance. This challenge primarily involves two key tasks: pedestrian detection and re-identification. While significant progress has been achieved in pedestrian detection tasks in recent years, enhancing the effectiveness of re-identification tasks remains a persistent challenge. This difficulty arises from the large total number of pedestrian samples in multi-object tracking datasets and the scarcity of individual instance samples. Motivated by recent rapid advancements in meta-learning techniques, we introduce MAML MOT, a meta-learning-based training approach for multi-object tracking. This approach leverages the rapid learning capability of meta-learning to tackle the issue of sample scarcity in pedestrian re-identification tasks, aiming to improve the model's generalization performance and robustness. Experimental results demonstrate that the proposed method achieves high accuracy on mainstream datasets in the MOT Challenge. This offers new perspectives and solutions for research in the field of pedestrian multi-object tracking.
Read more8/26/2024

0
Effective Motion Modeling for UAV-platform Multiple Object Tracking with Re-Margin Loss
Mufeng Yao, Jinlong Peng, Qingdong He, Bo Peng, Hao Chen, Mingmin Chi, Chao Liu, Jon Atli Benediktsson
Multiple object tracking (MOT) from unmanned aerial vehicle (UAV) platforms requires efficient motion modeling. This is because UAV-MOT faces both local object motion and global camera motion. Motion blur also increases the difficulty of detecting large moving objects. Previous UAV motion modeling approaches either focus only on local motion or ignore motion blurring effects, thus limiting their tracking performance and speed. To address these issues, we propose the Motion Mamba Module, which explores both local and global motion features through cross-correlation and bi-directional Mamba Modules for better motion modeling. To address the detection difficulties caused by motion blur, we also design motion margin loss to effectively improve the detection accuracy of motion blurred objects. Based on the Motion Mamba module and motion margin loss, our proposed MM-Tracker surpasses the state-of-the-art in two widely open-source UAV-MOT datasets. Code will be available.
Read more8/20/2024