Self-Adaptive Robust Motion Planning for High DoF Robot Manipulator using Deep MPC

0
Sign in to get full access
Overview
- This paper proposes a self-adaptive robust motion planning approach for high-degree-of-freedom (DoF) robot manipulators using deep model predictive control (MPC).
- The method aims to enable robots to navigate complex environments and handle uncertainties and disturbances in real-time.
- The authors develop a deep neural network-based MPC controller that can adapt to changes in the robot's dynamics and environment.
Plain English Explanation
The paper presents a new control system for high-complexity robotic arms that allows them to navigate through challenging environments and adapt to unexpected changes. Robotic arms often have many joints and degrees of freedom, making them difficult to control precisely, especially when encountering uncertainties or disturbances in the real world.
To address this, the researchers developed a deep learning-based model predictive control (MPC) system. MPC is a control strategy that predicts the future behavior of a system and optimizes the control inputs to achieve the desired outcome. By using a deep neural network to model the robot's dynamics, this approach can adapt in real-time to changes, making the robot more robust and able to handle challenging situations.
The key advantages of this method are its ability to handle high-dimensional robotic systems, adapt to uncertainties, and provide reliable low-level control for complex robotic tasks. This could enable more versatile and capable robots that can safely operate in unstructured environments.
Technical Explanation
The paper proposes a self-adaptive robust motion planning approach for high-DoF robot manipulators using deep MPC. The authors develop a deep neural network-based MPC controller that can adapt to changes in the robot's dynamics and environment.
The deep MPC controller consists of two main components: a neural network-based dynamics model and an optimization-based MPC module. The dynamics model is trained offline using data collected from the robot's operation, and it can capture the complex nonlinear relationships between the robot's state, control inputs, and disturbances. The MPC module then uses this dynamics model to predict the future behavior of the system and optimize the control inputs to achieve the desired motion plan, while considering constraints and uncertainties.
To enable self-adaptation, the authors propose a recursive least squares-based parameter estimation scheme that can update the dynamics model in real-time based on the observed system behavior. This allows the controller to adapt to changes in the robot's dynamics, such as those caused by payload variations or joint wear and tear.
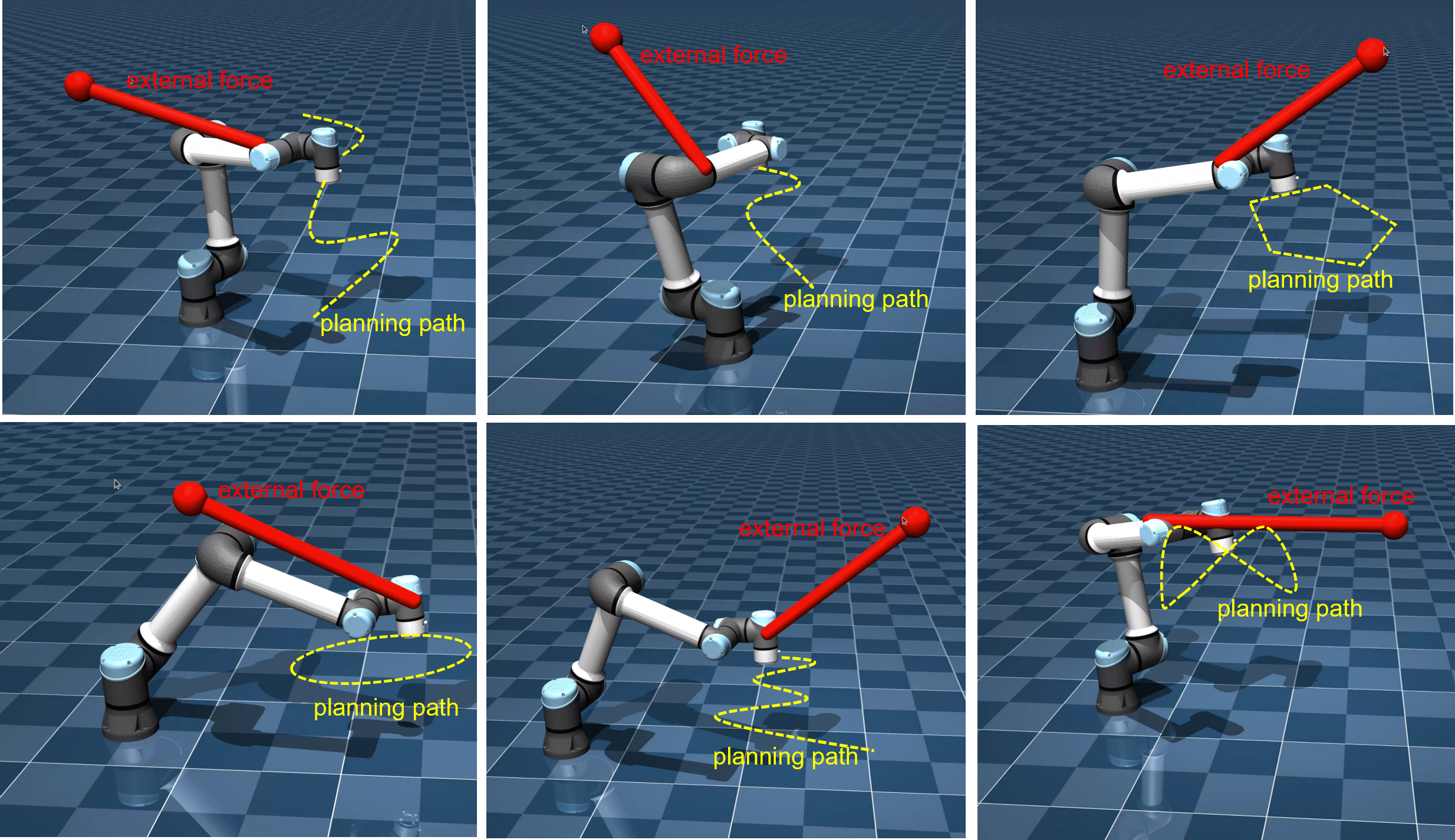
The authors evaluate their approach on a high-DoF robot manipulator navigating through cluttered environments with obstacles and external disturbances. The results demonstrate that the deep MPC controller can outperform traditional MPC and other reinforcement learning-based methods in terms of tracking accuracy, robustness, and computational efficiency.
Critical Analysis
The paper presents a promising approach for enhancing the robustness and adaptability of high-DoF robot manipulators, which is an important challenge in the field of robotics. The use of deep learning to model the robot's dynamics and the incorporation of real-time parameter estimation are key strengths of the proposed method.
However, the authors do not provide a detailed analysis of the limitations or potential issues with their approach. For example, the scalability of the method to larger and more complex robotic systems, the sensitivity of the parameter estimation to noise and disturbances, and the computational requirements for real-time implementation could be further explored.
Additionally, the authors could have compared their method to a broader range of state-of-the-art techniques, such as hierarchical MPC or cooperative load handling, to provide a more comprehensive evaluation of its performance and advantages.
Overall, the paper presents a valuable contribution to the field of robust and adaptive motion planning for high-DoF robot manipulators, but further research and analysis could strengthen the conclusions and practical implications of the work.
Conclusion
This paper introduces a self-adaptive robust motion planning approach for high-DoF robot manipulators using deep MPC. The key innovation is the integration of a deep neural network-based dynamics model with an optimization-based MPC controller, enabling the system to adapt to changes in the robot's dynamics and environment in real-time.
The proposed method has the potential to significantly enhance the capabilities of complex robotic systems, allowing them to navigate challenging environments and handle uncertainties more effectively. This could lead to more versatile and reliable robots that can safely operate in unstructured settings, with applications in various industries such as manufacturing, logistics, and disaster response.
While the paper demonstrates promising results, further research is needed to fully explore the limitations and scalability of the approach. Nonetheless, this work represents an important step forward in the development of robust and adaptive control systems for high-DoF robot manipulators.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Self-Adaptive Robust Motion Planning for High DoF Robot Manipulator using Deep MPC
Ye Zhang, Kangtong Mo, Fangzhou Shen, Xuanzhen Xu, Xingyu Zhang, Jiayue Yu, Chang Yu
In contemporary control theory, self-adaptive methodologies are highly esteemed for their inherent flexibility and robustness in managing modeling uncertainties. Particularly, robust adaptive control stands out owing to its potent capability of leveraging robust optimization algorithms to approximate cost functions and relax the stringent constraints often associated with conventional self-adaptive control paradigms. Deep learning methods, characterized by their extensive layered architecture, offer significantly enhanced approximation prowess. Notwithstanding, the implementation of deep learning is replete with challenges, particularly the phenomena of vanishing and exploding gradients encountered during the training process. This paper introduces a self-adaptive control scheme integrating a deep MPC, governed by an innovative weight update law designed to mitigate the vanishing and exploding gradient predicament by employing the gradient sign exclusively. The proffered controller is a self-adaptive dynamic inversion mechanism, integrating an augmented state observer within an auxiliary estimation circuit to enhance the training phase. This approach enables the deep MPC to learn the entire plant model in real-time and the efficacy of the controller is demonstrated through simulations involving a high-DoF robot manipulator, wherein the controller adeptly learns the nonlinear plant dynamics expeditiously and exhibits commendable performance in the motion planning task.
Read more7/19/2024
📈
0
Differentiable Robust Model Predictive Control
Alex Oshin, Hassan Almubarak, Evangelos A. Theodorou
Deterministic model predictive control (MPC), while powerful, is often insufficient for effectively controlling autonomous systems in the real-world. Factors such as environmental noise and model error can cause deviations from the expected nominal performance. Robust MPC algorithms aim to bridge this gap between deterministic and uncertain control. However, these methods are often excessively difficult to tune for robustness due to the nonlinear and non-intuitive effects that controller parameters have on performance. To address this challenge, we first present a unifying perspective on differentiable optimization for control using the implicit function theorem (IFT), from which existing state-of-the art methods can be derived. Drawing parallels with differential dynamic programming, the IFT enables the derivation of an efficient differentiable optimal control framework. The derived scheme is subsequently paired with a tube-based MPC architecture to facilitate the automatic and real-time tuning of robust controllers in the presence of large uncertainties and disturbances. The proposed algorithm is benchmarked on multiple nonlinear robotic systems, including two systems in the MuJoCo simulator environment and one hardware experiment on the Robotarium testbed, to demonstrate its efficacy.
Read more7/29/2024

0
Faster Model Predictive Control via Self-Supervised Initialization Learning
Zhaoxin Li, Letian Chen, Rohan Paleja, Subramanya Nageshrao, Matthew Gombolay
Optimization for robot control tasks, spanning various methodologies, includes Model Predictive Control (MPC). However, the complexity of the system, such as non-convex and non-differentiable cost functions and prolonged planning horizons often drastically increases the computation time, limiting MPC's real-world applicability. Prior works in speeding up the optimization have limitations on solving convex problem and generalizing to hold out domains. To overcome this challenge, we develop a novel framework aiming at expediting optimization processes. In our framework, we combine offline self-supervised learning and online fine-tuning through reinforcement learning to improve the control performance and reduce optimization time. We demonstrate the effectiveness of our method on a novel, challenging Formula-1-track driving task, achieving 3.9% higher performance in optimization time and 3.6% higher performance in tracking accuracy on challenging holdout tracks.
Read more8/9/2024

0
Embedded Hierarchical MPC for Autonomous Navigation
Dennis Benders, Johannes Kohler, Thijs Niesten, Robert Babuv{s}ka, Javier Alonso-Mora, Laura Ferranti
To efficiently deploy robotic systems in society, mobile robots need to autonomously and safely move through complex environments. Nonlinear model predictive control (MPC) methods provide a natural way to find a dynamically feasible trajectory through the environment without colliding with nearby obstacles. However, the limited computation power available on typical embedded robotic systems, such as quadrotors, poses a challenge to running MPC in real-time, including its most expensive tasks: constraints generation and optimization. To address this problem, we propose a novel hierarchical MPC scheme that interconnects a planning and a tracking layer. The planner constructs a trajectory with a long prediction horizon at a slow rate, while the tracker ensures trajectory tracking at a relatively fast rate. We prove that the proposed framework avoids collisions and is recursively feasible. Furthermore, we demonstrate its effectiveness in simulations and lab experiments with a quadrotor that needs to reach a goal position in a complex static environment. The code is efficiently implemented on the quadrotor's embedded computer to ensure real-time feasibility. Compared to a state-of-the-art single-layer MPC formulation, this allows us to increase the planning horizon by a factor of 5, which results in significantly better performance.
Read more6/18/2024