DUFOMap: Efficient Dynamic Awareness Mapping

0
Sign in to get full access
Overview
- Introduces a new method called DUFOMap for efficient dynamic awareness mapping
- Focuses on improving the effectiveness and efficiency of robot navigation in complex, dynamic environments
- Presents a novel approach to modeling and updating the robot's awareness of its surroundings in real-time
Plain English Explanation
DUFOMap: Efficient Dynamic Awareness Mapping is a research paper that proposes a new technique for helping robots navigate through complex, constantly changing environments. The key idea is to enable the robot to build and continuously update a detailed map of its surroundings, allowing it to plan and adjust its movement more effectively.
Traditionally, robots have relied on static maps or sensor data to guide their movement, which can become outdated or inaccurate in dynamic environments. DUFOMap aims to address this by using a more adaptive approach. It models the robot's awareness of its surroundings as a probabilistic distribution, which can be efficiently updated as the robot explores and senses changes in its environment.
This allows the robot to maintain a much more accurate and up-to-date understanding of its environment, enabling it to plan safer and more efficient routes, and quickly adapt to unexpected changes. For example, if a new obstacle appears in the robot's path, DUFOMap can quickly identify and respond to this, allowing the robot to smoothly navigate around it.
The research also explores using aerial LiDAR maps to further enhance the robot's awareness and improve its ability to navigate complex, cluttered environments. By combining these techniques, the researchers aim to create a highly effective and efficient system for robot navigation in dynamic real-world settings.
Technical Explanation
DUFOMap proposes a novel approach to modeling and updating a robot's awareness of its surrounding environment in real-time. Rather than relying on static maps or sensor data, the method represents the robot's awareness as a probabilistic distribution, which can be efficiently updated as the robot explores and senses changes in its environment.
The key components of the DUFOMap approach include:
-
Probabilistic Awareness Representation: The robot's awareness of its surroundings is modeled as a probability distribution, capturing the likelihood of obstacles or free space at different locations. This allows for a more nuanced and adaptive representation compared to traditional occupancy grid maps.
-
Efficient Awareness Update: As the robot moves and senses its environment, the awareness distribution is updated in an efficient manner, incorporating new sensor observations while preserving relevant historical information. This enables the robot to maintain an accurate and up-to-date understanding of its surroundings.
-
Aerial LiDAR Integration: The researchers also explore the use of aerial LiDAR maps to further enhance the robot's awareness and improve its ability to navigate complex, cluttered environments. By combining the DUFOMap approach with aerial LiDAR data, the robot can build a more comprehensive and accurate understanding of its environment.
The DUFOMap method is evaluated through extensive simulations and experiments, demonstrating its ability to enable more efficient and effective robot navigation in dynamic environments compared to traditional approaches. The [researchers also compare DUFOMap to other state-of-the-art techniques, such as Quad-Query and COMO, highlighting its advantages in terms of accuracy, efficiency, and adaptability.
Critical Analysis
The DUFOMap approach presents a promising solution for improving robot navigation in complex, dynamic environments. By modeling the robot's awareness as a probabilistic distribution and efficiently updating it based on sensor observations, the method can maintain a more accurate and up-to-date understanding of the surroundings, enabling more effective and adaptive navigation.
However, the paper does not discuss the potential limitations or challenges of the DUFOMap approach. For example, the computational and memory requirements of maintaining and updating the probabilistic awareness distribution might be a concern, especially for resource-constrained robots. Additionally, the reliance on accurate sensor data and the potential for sensor failures or occlusions could impact the method's performance in real-world scenarios.
Furthermore, the paper does not provide a thorough analysis of the approach's generalization capabilities. It would be valuable to understand how well DUFOMap would perform in environments with different characteristics, such as varying obstacle densities, dynamics, or sensor modalities.
Overall, the DUFOMap method presents an interesting and promising direction for improving robot navigation in dynamic environments. However, further research is needed to explore its limitations, robustness, and practical applicability in a wider range of real-world scenarios.
Conclusion
The DUFOMap paper introduces a novel approach to dynamic awareness mapping for robot navigation in complex environments. By representing the robot's awareness as a probabilistic distribution and efficiently updating it based on sensor observations, the method enables the robot to maintain a more accurate and adaptive understanding of its surroundings.
This, in turn, allows the robot to plan safer and more efficient routes, and quickly respond to changes in the environment. The integration of aerial LiDAR data further enhances the robot's awareness and its ability to navigate cluttered, complex spaces.
While the paper demonstrates promising results in simulation and experiment, more research is needed to fully understand the method's limitations, robustness, and practical applicability. Nonetheless, the DUFOMap approach represents an exciting advancement in the field of robot navigation and could have significant implications for the development of more intelligent and adaptive autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DUFOMap: Efficient Dynamic Awareness Mapping
Daniel Duberg, Qingwen Zhang, MingKai Jia, Patric Jensfelt
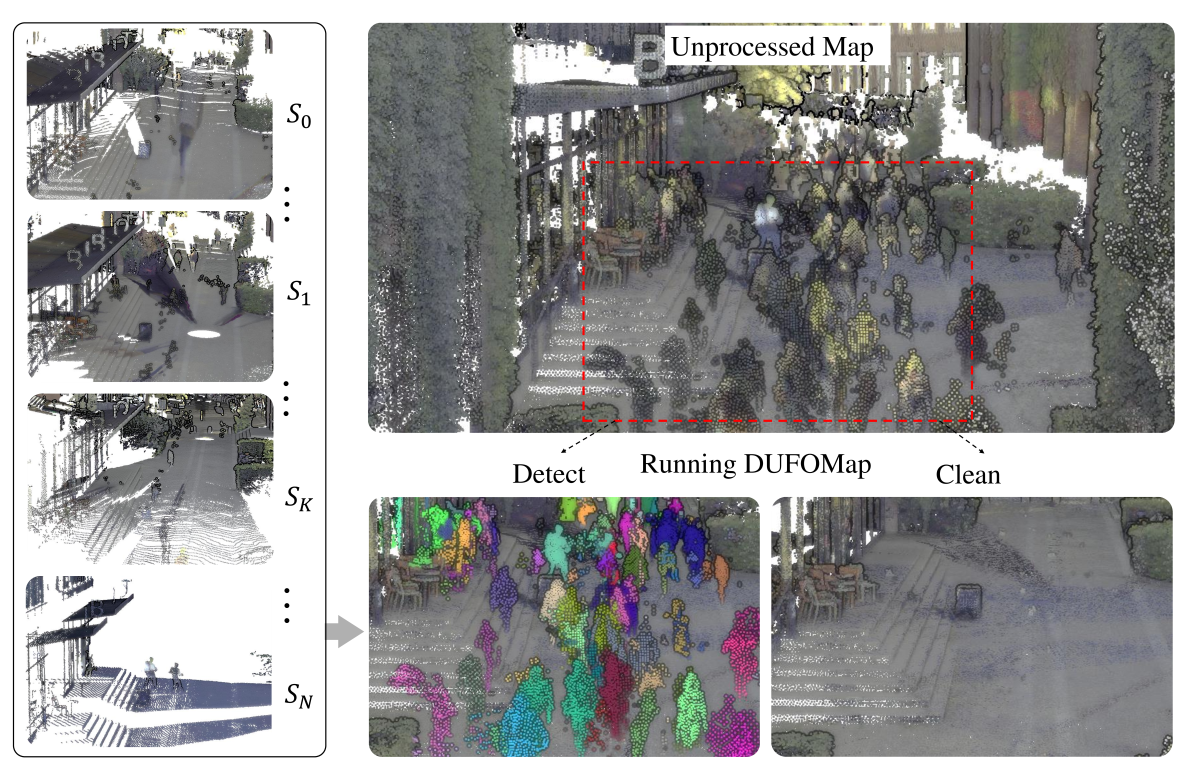
The dynamic nature of the real world is one of the main challenges in robotics. The first step in dealing with it is to detect which parts of the world are dynamic. A typical benchmark task is to create a map that contains only the static part of the world to support, for example, localization and planning. Current solutions are often applied in post-processing, where parameter tuning allows the user to adjust the setting for a specific dataset. In this paper, we propose DUFOMap, a novel dynamic awareness mapping framework designed for efficient online processing. Despite having the same parameter settings for all scenarios, it performs better or is on par with state-of-the-art methods. Ray casting is utilized to identify and classify fully observed empty regions. Since these regions have been observed empty, it follows that anything inside them at another time must be dynamic. Evaluation is carried out in various scenarios, including outdoor environments in KITTI and Argoverse 2, open areas on the KTH campus, and with different sensor types. DUFOMap outperforms the state of the art in terms of accuracy and computational efficiency. The source code, benchmarks, and links to the datasets utilized are provided. See https://kth-rpl.github.io/dufomap for more details.
Read more4/15/2024

0
Online Diffusion-Based 3D Occupancy Prediction at the Frontier with Probabilistic Map Reconciliation
Alec Reed, Lorin Achey, Brendan Crowe, Bradley Hayes, Christoffer Heckman
Autonomous navigation and exploration in unmapped environments remains a significant challenge in robotics due to the difficulty robots face in making commonsense inference of unobserved geometries. Recent advancements have demonstrated that generative modeling techniques, particularly diffusion models, can enable systems to infer these geometries from partial observation. In this work, we present implementation details and results for real-time, online occupancy prediction using a modified diffusion model. By removing attention-based visual conditioning and visual feature extraction components, we achieve a 73$%$ reduction in runtime with minimal accuracy reduction. These modifications enable occupancy prediction across the entire map, rather than being limited to the area around the robot where camera data can be collected. We introduce a probabilistic update method for merging predicted occupancy data into running occupancy maps, resulting in a 71$%$ improvement in predicting occupancy at map frontiers compared to previous methods. Finally, we release our code and a ROS node for on-robot operation at github.com/arpg/sceneSense_ws.
Read more9/18/2024
🗣️
0
FRAME: A Modular Framework for Autonomous Map-merging: Advancements in the Field
Nikolaos Stathoulopoulos, Bjorn Lindqvist, Anton Koval, Ali-akbar Agha-mohammadi, George Nikolakopoulos
In this article, a novel approach for merging 3D point cloud maps in the context of egocentric multi-robot exploration is presented. Unlike traditional methods, the proposed approach leverages state-of-the-art place recognition and learned descriptors to efficiently detect overlap between maps, eliminating the need for the time-consuming global feature extraction and feature matching process. The estimated overlapping regions are used to calculate a homogeneous rigid transform, which serves as an initial condition for the GICP point cloud registration algorithm to refine the alignment between the maps. The advantages of this approach include faster processing time, improved accuracy, and increased robustness in challenging environments. Furthermore, the effectiveness of the proposed framework is successfully demonstrated through multiple field missions of robot exploration in a variety of different underground environments.
Read more8/29/2024
🐍
0
Localization Under Consistent Assumptions Over Dynamics
Matti Pekkanen, Francesco Verdoja, Ville Kyrki
Accurate maps are a prerequisite for virtually all mobile robot tasks. Most state-of-the-art maps assume a static world; therefore, dynamic objects are filtered out of the measurements. However, this division ignores movable but non-moving -- i.e., semi-static -- objects, which are usually recorded in the map and treated as static objects, violating the static world assumption and causing errors in the localization. This paper presents a method for consistently modeling moving and movable objects to match the map and measurements. This reduces the error resulting from inconsistent categorization and treatment of non-static measurements. A semantic segmentation network is used to categorize the measurements into static and semi-static classes, and a background subtraction filter is used to remove dynamic measurements. Finally, we show that consistent assumptions over dynamics improve localization accuracy when compared against a state-of-the-art baseline solution using real-world data from the Oxford Radar RobotCar data set.
Read more9/2/2024