FRAME: A Modular Framework for Autonomous Map-merging: Advancements in the Field

0
🗣️
Sign in to get full access
Overview
- A novel approach for merging 3D point cloud maps in the context of egocentric multi-robot exploration
- Leverages state-of-the-art place recognition and learned descriptors to efficiently detect overlap between maps
- Eliminates the need for time-consuming global feature extraction and feature matching process
- Calculates a homogeneous rigid transform as an initial condition for the GICP point cloud registration algorithm
- Demonstrates improved processing time, accuracy, and robustness in challenging environments
Plain English Explanation
This research presents a new way to combine 3D maps created by multiple robots exploring an area. Unlike traditional methods, this approach uses advanced techniques to quickly identify where the maps overlap, without the need for a lengthy process of extracting and comparing features across the entire maps.
The key step is using place recognition and learned descriptors to efficiently detect where the maps overlap. This eliminates the time-consuming task of extracting and matching features across the whole maps.
The overlapping regions are then used to calculate an initial alignment between the maps. This serves as the starting point for a more detailed registration algorithm to fine-tune the alignment. This overall approach leads to faster processing, better accuracy, and improved robustness in challenging environments like underground spaces.
Technical Explanation
The proposed method leverages state-of-the-art place recognition and learned descriptors to efficiently detect overlap between the 3D point cloud maps created by multiple robots. This eliminates the need for the time-consuming global feature extraction and feature matching process used in traditional approaches.
The estimated overlapping regions are then used to calculate a homogeneous rigid transform, which serves as an initial condition for the GICP (Generalized-ICP) point cloud registration algorithm. This helps refine the alignment between the maps.
The advantages of this approach include faster processing time, improved accuracy, and increased robustness in challenging environments like underground spaces. The effectiveness of the proposed framework is demonstrated through multiple field missions of robot exploration in a variety of different underground environments.
Critical Analysis
The paper presents a well-designed approach that addresses the key challenge of efficiently merging 3D point cloud maps from multiple robots. By leveraging state-of-the-art techniques like place recognition and learned descriptors, the method is able to bypass the time-consuming feature extraction and matching process used in traditional methods.
However, the paper does not provide detailed analysis on the limitations of the approach, such as how it might perform in highly dynamic environments or with noisy sensor data. Additionally, the experiments are mostly focused on underground environments, so further testing in diverse scenarios would be valuable to assess the broader applicability of the framework.
It would also be interesting to see how this approach compares to other state-of-the-art techniques for multi-robot mapping, such as mapping high-level semantic regions or sensor-based multi-robot coverage control. A more thorough comparative analysis could help further validate the strengths and weaknesses of the proposed method.
Conclusion
This research presents a novel approach for efficiently merging 3D point cloud maps in the context of multi-robot exploration. By leveraging advanced techniques like place recognition and learned descriptors, the method is able to quickly identify overlapping regions between maps, eliminating the need for time-consuming global feature extraction and matching.
The calculated initial alignment is then refined using a point cloud registration algorithm, leading to faster processing, improved accuracy, and increased robustness in challenging environments. The effectiveness of the framework is demonstrated through field trials in various underground settings, showcasing its potential to enhance multi-robot exploration and mapping capabilities.
As the field of cooperative mapping continues to evolve, this research contributes a valuable innovation that could have significant implications for applications ranging from search and rescue operations to autonomous navigation in complex, unstructured environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🗣️
0
FRAME: A Modular Framework for Autonomous Map-merging: Advancements in the Field
Nikolaos Stathoulopoulos, Bjorn Lindqvist, Anton Koval, Ali-akbar Agha-mohammadi, George Nikolakopoulos
In this article, a novel approach for merging 3D point cloud maps in the context of egocentric multi-robot exploration is presented. Unlike traditional methods, the proposed approach leverages state-of-the-art place recognition and learned descriptors to efficiently detect overlap between maps, eliminating the need for the time-consuming global feature extraction and feature matching process. The estimated overlapping regions are used to calculate a homogeneous rigid transform, which serves as an initial condition for the GICP point cloud registration algorithm to refine the alignment between the maps. The advantages of this approach include faster processing time, improved accuracy, and increased robustness in challenging environments. Furthermore, the effectiveness of the proposed framework is successfully demonstrated through multiple field missions of robot exploration in a variety of different underground environments.
Read more8/29/2024

0
Outlier-Robust Long-Term Robotic Mapping Leveraging Ground Segmentation
Hyungtae Lim
Despite the remarkable advancements in deep learning-based perception technologies and simultaneous localization and mapping (SLAM), one can face the failure of these approaches when robots encounter scenarios outside their modeled experiences (here, the term modeling encompasses both conventional pattern finding and data-driven approaches). In particular, because learning-based methods are prone to catastrophic failure when operated in untrained scenes, there is still a demand for conventional yet robust approaches that work out of the box in diverse scenarios, such as real-world robotic services and SLAM competitions. In addition, the dynamic nature of real-world environments, characterized by changing surroundings over time and the presence of moving objects, leads to undesirable data points that hinder a robot from localization and path planning. Consequently, methodologies that enable long-term map management, such as multi-session SLAM and static map building, become essential. Therefore, to achieve a robust long-term robotic mapping system that can work out of the box, first, I propose (i) fast and robust ground segmentation to reject the ground points, which are featureless and thus not helpful for localization and mapping. Then, by employing the concept of graduated non-convexity (GNC), I propose (ii) outlier-robust registration with ground segmentation that overcomes the presence of gross outliers within the feature matching results, and (iii) hierarchical multi-session SLAM that not only uses our proposed GNC-based registration but also employs a GNC solver to be robust against outlier loop candidates. Finally, I propose (iv) instance-aware static map building that can handle the presence of moving objects in the environment based on the observation that most moving objects in urban environments are inevitably in contact with the ground.
Read more5/29/2024
0
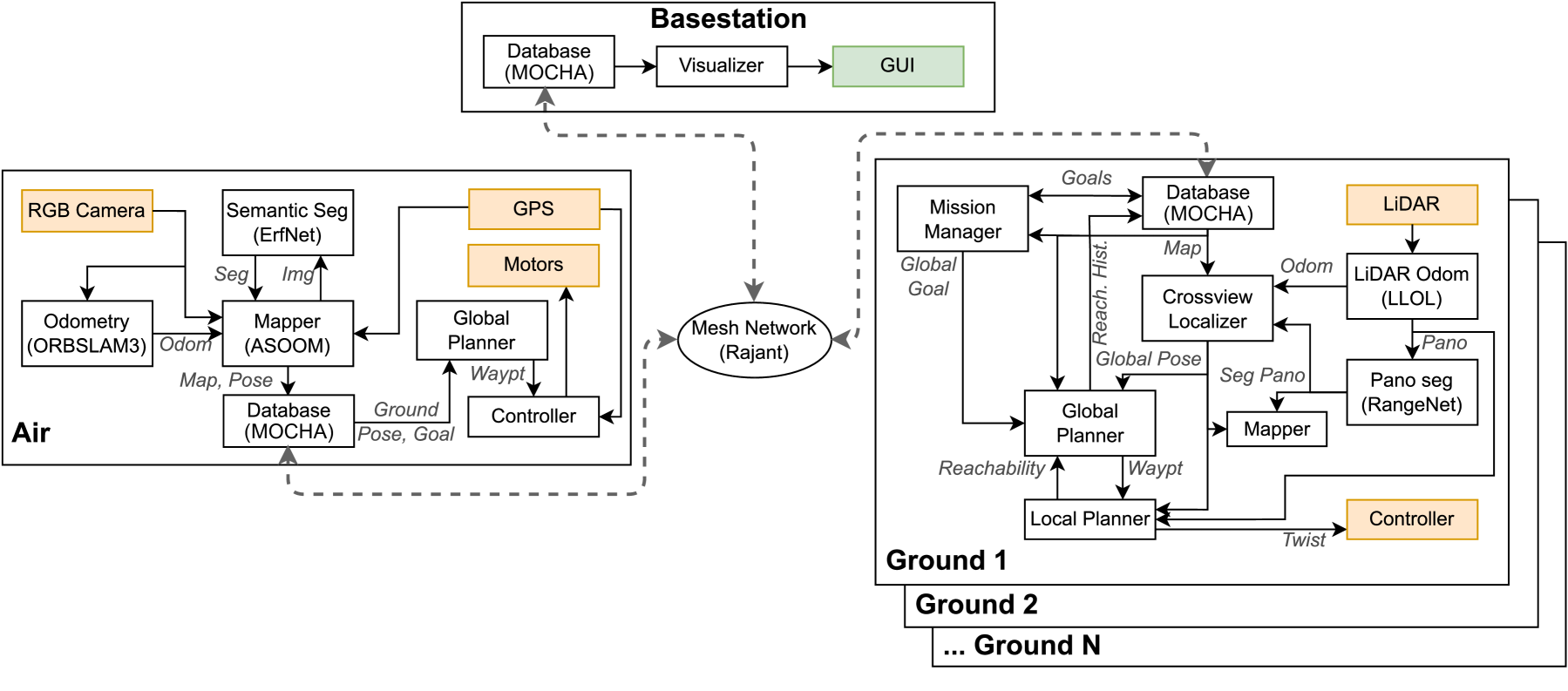
Air-Ground Collaboration with SPOMP: Semantic Panoramic Online Mapping and Planning
Ian D. Miller, Fernando Cladera, Trey Smith, Camillo Jose Taylor, Vijay Kumar
Mapping and navigation have gone hand-in-hand since long before robots existed. Maps are a key form of communication, allowing someone who has never been somewhere to nonetheless navigate that area successfully. In the context of multi-robot systems, the maps and information that flow between robots are necessary for effective collaboration, whether those robots are operating concurrently, sequentially, or completely asynchronously. In this paper, we argue that maps must go beyond encoding purely geometric or visual information to enable increasingly complex autonomy, particularly between robots. We propose a framework for multi-robot autonomy, focusing in particular on air and ground robots operating in outdoor 2.5D environments. We show that semantic maps can enable the specification, planning, and execution of complex collaborative missions, including localization in GPS-denied settings. A distinguishing characteristic of this work is that we strongly emphasize field experiments and testing, and by doing so demonstrate that these ideas can work at scale in the real world. We also perform extensive simulation experiments to validate our ideas at even larger scales. We believe these experiments and the experimental results constitute a significant step forward toward advancing the state-of-the-art of large-scale, collaborative multi-robot systems operating with real communication, navigation, and perception constraints.
Read more7/16/2024
0
Efficient and Distributed Large-Scale 3D Map Registration using Tomographic Features
Halil Utku Unlu, Anthony Tzes, Prashanth Krishnamurthy, Farshad Khorrami
A robust, resource-efficient, distributed, and minimally parameterized 3D map matching and merging algorithm is proposed. The suggested algorithm utilizes tomographic features from 2D projections of horizontal cross-sections of gravity-aligned local maps, and matches these projection slices at all possible height differences, enabling the estimation of four degrees of freedom in an efficient and parallelizable manner. The advocated algorithm improves state-of-the-art feature extraction and registration pipelines by an order of magnitude in memory use and execution time. Experimental studies are offered to investigate the efficiency of this 3D map merging scheme.
Read more7/1/2024