COMO: Compact Mapping and Odometry

0

Sign in to get full access
Overview
- Proposes a compact mapping and odometry (COMO) system for efficient real-time 3D mapping and localization
- Introduces a lightweight mapping backend that represents the environment using compact feature descriptors
- Demonstrates robust real-time performance and accurate odometry estimation on various datasets
Plain English Explanation
The paper presents a new system called COMO (Compact Mapping and Odometry) that aims to create accurate 3D maps and track a robot's position efficiently in real-time. Traditional 3D mapping and localization methods can be computationally expensive, making them difficult to run on resource-constrained devices.
COMO addresses this by using a lightweight mapping backend that represents the environment using compact feature descriptors instead of dense 3D point clouds or meshes. This allows the system to maintain an up-to-date map and estimate the robot's pose (position and orientation) with low computational requirements. The researchers demonstrate that COMO can achieve robust real-time performance and accurate odometry (movement) estimation on various datasets, making it a promising approach for applications like autonomous navigation, augmented reality, and robotics.
Technical Explanation
The paper introduces a novel compact mapping and odometry (COMO) system for real-time 3D mapping and localization. The key contribution is a lightweight mapping backend that represents the environment using compact feature descriptors, rather than dense 3D point clouds or mesh representations.
The COMO system consists of a frontend that processes sensor data (e.g., RGB-D cameras, LiDAR) and a backend that maintains a compact map of the environment. The frontend extracts sparse features from the sensor data and associates them with compact descriptors. The backend ingests these feature descriptors and uses them to update an internal map representation and estimate the robot's pose.
The compact map representation is based on a novel data structure called the Truncated Signed Distance Field (TSDF), which stores a compact 3D occupancy grid. The TSDF allows efficient updates and queries, enabling real-time mapping and localization performance. The odometry estimation component of COMO uses a sliding-window optimization approach to jointly estimate the robot's trajectory and map updates.
The researchers evaluate COMO on several publicly available datasets, demonstrating its ability to achieve accurate 3D mapping and robust real-time odometry estimation, while maintaining a lightweight computational footprint compared to state-of-the-art methods. The results showcase the potential of COMO for applications such as Fully Geometric Panoramic Localization, 3D Congealing: 3D-Aware Image Alignment in the Wild, POCO: Point Context Cluster for RGBD Indoor Place, Tightly Coupled LiDAR-IMU-Wheel Odometry for Online Exploration, and You Only Scan Once: Dynamic Scene Reconstruction.
Critical Analysis
The paper presents a compelling approach to efficient 3D mapping and localization, but there are a few potential limitations and areas for further research:
- The reliance on feature descriptors may limit the system's ability to capture fine-grained details of the environment, potentially impacting the accuracy of the 3D map or localization in some scenarios.
- The evaluation is primarily focused on static environments, and the authors acknowledge the need to address dynamic environments and moving objects, which are crucial for many real-world applications.
- The paper does not provide a direct comparison to state-of-the-art methods in terms of computational efficiency and resource usage, which would help quantify the advantages of the COMO system.
Overall, the COMO system represents an interesting contribution to the field of real-time 3D mapping and localization, and the compact mapping approach is a promising direction for further research and development.
Conclusion
The COMO (Compact Mapping and Odometry) system introduced in this paper offers an efficient approach to real-time 3D mapping and localization. By using a lightweight mapping backend based on compact feature descriptors, the system can maintain an up-to-date representation of the environment and estimate the robot's pose with robust performance and low computational requirements.
The successful evaluation on various datasets demonstrates the potential of the COMO system for applications such as autonomous navigation, augmented reality, and robotics, where efficient 3D mapping and localization are critical. While the paper identifies some areas for further research, the core ideas presented in COMO represent a valuable contribution to the field of real-time 3D perception and localization.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
COMO: Compact Mapping and Odometry
Eric Dexheimer, Andrew J. Davison
We present COMO, a real-time monocular mapping and odometry system that encodes dense geometry via a compact set of 3D anchor points. Decoding anchor point projections into dense geometry via per-keyframe depth covariance functions guarantees that depth maps are joined together at visible anchor points. The representation enables joint optimization of camera poses and dense geometry, intrinsic 3D consistency, and efficient second-order inference. To maintain a compact yet expressive map, we introduce a frontend that leverages the covariance function for tracking and initializing potentially visually indistinct 3D points across frames. Altogether, we introduce a real-time system capable of estimating accurate poses and consistent geometry.
Read more7/24/2024

0
CodedVO: Coded Visual Odometry
Sachin Shah, Naitri Rajyaguru, Chahat Deep Singh, Christopher Metzler, Yiannis Aloimonos
Autonomous robots often rely on monocular cameras for odometry estimation and navigation. However, the scale ambiguity problem presents a critical barrier to effective monocular visual odometry. In this paper, we present CodedVO, a novel monocular visual odometry method that overcomes the scale ambiguity problem by employing custom optics to physically encode metric depth information into imagery. By incorporating this information into our odometry pipeline, we achieve state-of-the-art performance in monocular visual odometry with a known scale. We evaluate our method in diverse indoor environments and demonstrate its robustness and adaptability. We achieve a 0.08m average trajectory error in odometry evaluation on the ICL-NUIM indoor odometry dataset.
Read more7/26/2024

0
IMU-Aided Event-based Stereo Visual Odometry
Junkai Niu, Sheng Zhong, Yi Zhou
Direct methods for event-based visual odometry solve the mapping and camera pose tracking sub-problems by establishing implicit data association in a way that the generative model of events is exploited. The main bottlenecks faced by state-of-the-art work in this field include the high computational complexity of mapping and the limited accuracy of tracking. In this paper, we improve our previous direct pipeline textit{Event-based Stereo Visual Odometry} in terms of accuracy and efficiency. To speed up the mapping operation, we propose an efficient strategy of edge-pixel sampling according to the local dynamics of events. The mapping performance in terms of completeness and local smoothness is also improved by combining the temporal stereo results and the static stereo results. To circumvent the degeneracy issue of camera pose tracking in recovering the yaw component of general 6-DoF motion, we introduce as a prior the gyroscope measurements via pre-integration. Experiments on publicly available datasets justify our improvement. We release our pipeline as an open-source software for future research in this field.
Read more5/8/2024
0
Real-time 3D semantic occupancy prediction for autonomous vehicles using memory-efficient sparse convolution
Samuel Sze, Lars Kunze
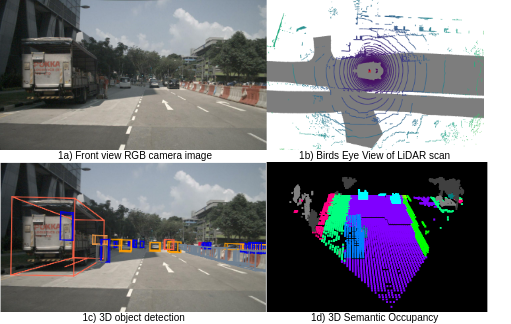
In autonomous vehicles, understanding the surrounding 3D environment of the ego vehicle in real-time is essential. A compact way to represent scenes while encoding geometric distances and semantic object information is via 3D semantic occupancy maps. State of the art 3D mapping methods leverage transformers with cross-attention mechanisms to elevate 2D vision-centric camera features into the 3D domain. However, these methods encounter significant challenges in real-time applications due to their high computational demands during inference. This limitation is particularly problematic in autonomous vehicles, where GPU resources must be shared with other tasks such as localization and planning. In this paper, we introduce an approach that extracts features from front-view 2D camera images and LiDAR scans, then employs a sparse convolution network (Minkowski Engine), for 3D semantic occupancy prediction. Given that outdoor scenes in autonomous driving scenarios are inherently sparse, the utilization of sparse convolution is particularly apt. By jointly solving the problems of 3D scene completion of sparse scenes and 3D semantic segmentation, we provide a more efficient learning framework suitable for real-time applications in autonomous vehicles. We also demonstrate competitive accuracy on the nuScenes dataset.
Read more5/21/2024