RGBD-Glue: General Feature Combination for Robust RGB-D Point Cloud Registration

0
✨
Sign in to get full access
Overview
- The paper proposes a new feature combination framework for point cloud registration, which can effectively leverage both geometric and visual information to improve registration accuracy.
- The framework includes an explicit filter based on transformation consistency to overcome the weaknesses of individual features, and an adaptive threshold to extract more valid information from the two types of features.
- The proposed approach can work with both hand-crafted and learning-based feature descriptors, and achieves state-of-the-art performance on the ScanNet dataset.
Plain English Explanation
Point cloud registration is the process of aligning two or more 3D point clouds, which is a fundamental task for many applications, such as 3D mapping and image-to-point-cloud registration. Traditionally, researchers have used geometric information, like the shape and location of points, to extract features, match them, and estimate the transformation between point clouds.
However, with the recent advancements in RGB-D sensors, researchers have started to explore using visual information, such as color and texture, to improve the registration performance. These studies have focused on extracting distinctive features by combining geometric and visual features using deep learning techniques. But this approach doesn't effectively address the weaknesses of individual features, and may not be able to fully leverage the valid information from both types of features.
The paper proposes a new feature combination framework that takes a different approach. Instead of a deep fusion, it uses a looser but more effective combination of the geometric and visual features. The framework also includes an explicit filter based on the consistency of the estimated transformations, which can help overcome the weaknesses of individual features. Additionally, it uses an adaptive threshold to extract more valid information from the two types of features.
This distinctive design allows the proposed framework to estimate more accurate correspondences between the point clouds, which leads to better registration performance. The approach can work with both hand-crafted and learning-based feature descriptors, and achieves state-of-the-art results on the ScanNet dataset, with a rotation accuracy of 99.1%.
Technical Explanation
The paper presents a new feature combination framework for point cloud registration that leverages both geometric and visual information. The framework consists of three key components:
-
Loose Feature Combination: Instead of a deep fusion of the geometric and visual features, the framework applies a looser but more effective combination, which can better address the weaknesses of individual features.
-
Explicit Transformation Consistency Filter: An explicit filter based on the consistency of the estimated transformations is designed to overcome the weaknesses of each individual feature type.
-
Adaptive Threshold for Feature Extraction: An adaptive threshold, determined by the error distribution, is proposed to extract more valid information from the two types of features.
The authors evaluate the proposed framework on the ScanNet dataset, and it achieves state-of-the-art performance, with a rotation accuracy of 99.1%. Compared to previous methods that focused on deep feature fusion, the proposed framework can more effectively leverage the valid information from both geometric and visual features, leading to more accurate correspondences and registration results.
The paper also discusses the potential benefits of the framework for both hand-crafted and learning-based feature descriptors, making it a versatile and robust solution for point cloud registration tasks.
Critical Analysis
The paper presents a well-designed feature combination framework that addresses some of the limitations of previous approaches to point cloud registration. The explicit transformation consistency filter and the adaptive threshold for feature extraction are particularly innovative and effective components.
However, the paper does not provide a detailed analysis of the limitations or potential drawbacks of the proposed framework. For example, it would be useful to understand how the framework performs on more challenging datasets or scenarios, such as point clouds with significant occlusions or noise.
Additionally, the paper could have explored the trade-offs between the looser feature combination approach and more complex deep fusion techniques. While the proposed framework achieves state-of-the-art results, there may be scenarios where a deeper integration of geometric and visual features could be more beneficial.
Further research could also investigate the generalization of the proposed framework to other 3D registration tasks, such as unsupervised RGB-D registration or robust point cloud registration using neural diffusion. Exploring the framework's performance on larger-scale, real-world datasets would also help validate its practical applicability.
Conclusion
The paper proposes a novel feature combination framework for point cloud registration that effectively leverages both geometric and visual information. By using a looser but more effective fusion, an explicit transformation consistency filter, and an adaptive threshold for feature extraction, the framework can overcome the weaknesses of individual features and achieve state-of-the-art registration performance.
This research represents an important advancement in the field of 3D point cloud registration, with potential applications in 3D mapping, image-to-point-cloud registration, and other areas that rely on accurate alignment of 3D data. The framework's ability to work with both hand-crafted and learning-based feature descriptors also makes it a versatile and practical solution for a wide range of point cloud registration tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
✨
0
RGBD-Glue: General Feature Combination for Robust RGB-D Point Cloud Registration
Congjia Chen, Xiaoyu Jia, Yanhong Zheng, Yufu Qu
Point cloud registration is a fundamental task for estimating rigid transformations between point clouds. Previous studies have used geometric information for extracting features, matching and estimating transformation. Recently, owing to the advancement of RGB-D sensors, researchers have attempted to combine visual and geometric information to improve registration performance. However, these studies focused on extracting distinctive features by deep feature fusion, which cannot effectively solve the negative effects of each feature's weakness, and cannot sufficiently leverage the valid information. In this paper, we propose a new feature combination framework, which applies a looser but more effective combination. An explicit filter based on transformation consistency is designed for the combination framework, which can overcome each feature's weakness. And an adaptive threshold determined by the error distribution is proposed to extract more valid information from the two types of features. Owing to the distinctive design, our proposed framework can estimate more accurate correspondences and is applicable to both hand-crafted and learning-based feature descriptors. Experiments on ScanNet and 3DMatch show that our method achieves a state-of-the-art performance.
Read more8/22/2024

0
New!LoGDesc: Local geometric features aggregation for robust point cloud registration
Karim Slimani, Brahim Tamadazte, Catherine Achard
This paper introduces a new hybrid descriptor for 3D point matching and point cloud registration, combining local geometrical properties and learning-based feature propagation for each point's neighborhood structure description. The proposed architecture first extracts prior geometrical information by computing each point's planarity, anisotropy, and omnivariance using a Principal Components Analysis (PCA). This prior information is completed by a descriptor based on the normal vectors estimated thanks to constructing a neighborhood based on triangles. The final geometrical descriptor is propagated between the points using local graph convolutions and attention mechanisms. The new feature extractor is evaluated on ModelNet40, Bunny Stanford dataset, KITTI and MVP (Multi-View Partial)-RG for point cloud registration and shows interesting results, particularly on noisy and low overlapping point clouds.
Read more10/4/2024
0
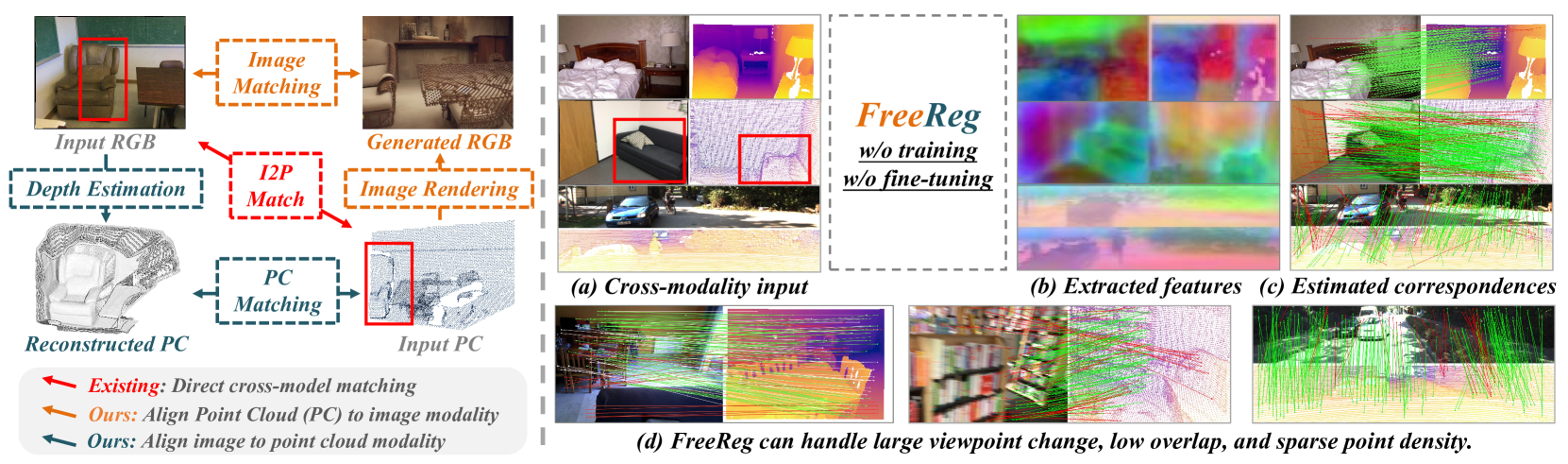
FreeReg: Image-to-Point Cloud Registration Leveraging Pretrained Diffusion Models and Monocular Depth Estimators
Haiping Wang, Yuan Liu, Bing Wang, Yujing Sun, Zhen Dong, Wenping Wang, Bisheng Yang
Matching cross-modality features between images and point clouds is a fundamental problem for image-to-point cloud registration. However, due to the modality difference between images and points, it is difficult to learn robust and discriminative cross-modality features by existing metric learning methods for feature matching. Instead of applying metric learning on cross-modality data, we propose to unify the modality between images and point clouds by pretrained large-scale models first, and then establish robust correspondence within the same modality. We show that the intermediate features, called diffusion features, extracted by depth-to-image diffusion models are semantically consistent between images and point clouds, which enables the building of coarse but robust cross-modality correspondences. We further extract geometric features on depth maps produced by the monocular depth estimator. By matching such geometric features, we significantly improve the accuracy of the coarse correspondences produced by diffusion features. Extensive experiments demonstrate that without any task-specific training, direct utilization of both features produces accurate image-to-point cloud registration. On three public indoor and outdoor benchmarks, the proposed method averagely achieves a 20.6 percent improvement in Inlier Ratio, a three-fold higher Inlier Number, and a 48.6 percent improvement in Registration Recall than existing state-of-the-arts.
Read more4/16/2024
📈
0
Robust Point Cloud Registration in Robotic Inspection with Locally Consistent Gaussian Mixture Model
Lingjie Su, Wei Xu, Wenlong Li
In robotic inspection of aviation parts, achieving accurate pairwise point cloud registration between scanned and model data is essential. However, noise and outliers generated in robotic scanned data can compromise registration accuracy. To mitigate this challenge, this article proposes a probability-based registration method utilizing Gaussian Mixture Model (GMM) with local consistency constraint. This method converts the registration problem into a model fitting one, constraining the similarity of posterior distributions between neighboring points to enhance correspondence robustness. We employ the Expectation Maximization algorithm iteratively to find optimal rotation matrix and translation vector while obtaining GMM parameters. Both E-step and M-step have closed-form solutions. Simulation and actual experiments confirm the method's effectiveness, reducing root mean square error by 20% despite the presence of noise and outliers. The proposed method excels in robustness and accuracy compared to existing methods.
Read more7/25/2024