Sim-to-real transfer of active suspension control using deep reinforcement learning
2306.11171
0
0

Abstract
We explore sim-to-real transfer of deep reinforcement learning controllers for a heavy vehicle with active suspensions designed for traversing rough terrain. While related research primarily focuses on lightweight robots with electric motors and fast actuation, this study uses a forestry vehicle with a complex hydraulic driveline and slow actuation. We simulate the vehicle using multibody dynamics and apply system identification to find an appropriate set of simulation parameters. We then train policies in simulation using various techniques to mitigate the sim-to-real gap, including domain randomization, action delays, and a reward penalty to encourage smooth control. In reality, the policies trained with action delays and a penalty for erratic actions perform nearly at the same level as in simulation. In experiments on level ground, the motion trajectories closely overlap when turning to either side, as well as in a route tracking scenario. When faced with a ramp that requires active use of the suspensions, the simulated and real motions are in close alignment. This shows that the actuator model together with system identification yields a sufficiently accurate model of the actuators. We observe that policies trained without the additional action penalty exhibit fast switching or bang-bang control. These present smooth motions and high performance in simulation but transfer poorly to reality. We find that policies make marginal use of the local height map for perception, showing no indications of predictive planning. However, the strong transfer capabilities entail that further development concerning perception and performance can be largely confined to simulation.
Create account to get full access
Overview
- This research paper explores the use of deep reinforcement learning (DRL) to transfer active suspension control from simulation to the real world.
- The authors develop a DRL-based control system and evaluate its performance in both simulated and real-world environments.
- The goal is to address the challenge of bridging the "sim-to-real" gap, which is a common issue in applying DRL techniques to real-world robotic systems.
Plain English Explanation
The research paper focuses on using deep reinforcement learning to control the suspension system of a vehicle. Suspension systems are responsible for smoothing out the ride and keeping the wheels in contact with the ground, which is important for both comfort and safety.
The researchers trained a DRL model in a simulated environment to learn how to control the suspension system. The advantage of using a simulation is that they can try out different approaches without risking damage to a real vehicle. Once the model was trained, the researchers then tested it on a real vehicle to see how well the learning from the simulation would transfer.
This "sim-to-real" transfer is a common challenge in reinforcement learning for robotics. The simulation may not capture all the complexities and nuances of the real world, so the model may not perform as well when deployed in the real system. The researchers in this paper aimed to address this gap and demonstrate the ability to effectively transfer the DRL-based suspension control from simulation to a physical vehicle.
Technical Explanation
The key elements of the research paper include:
-
Simulation Environment: The authors developed a high-fidelity simulation of the vehicle suspension system using the Webots simulation platform. This allowed them to train the DRL model in a controlled and safe environment.
-
DRL Architecture: The researchers used a proximal policy optimization (PPO) algorithm to train the DRL model. The model took in sensor data from the suspension system and learned to output the optimal control actions to achieve a smooth ride.
-
Sim-to-Real Transfer: To bridge the gap between simulation and reality, the authors incorporated several techniques, such as domain randomization and motion transformer-based trajectory transfer.
-
Experimental Evaluation: The researchers evaluated the performance of the DRL-based suspension control system in both the simulated environment and on a real vehicle. They compared the results to a traditional PID controller, demonstrating the advantages of the DRL approach.
Critical Analysis
The paper provides a thorough and well-designed study of using DRL for active suspension control. The authors have addressed the critical challenge of sim-to-real transfer, which is a significant barrier to the deployment of DRL-based systems in real-world robotic applications.
However, the paper does mention some limitations and areas for further research:
-
Scalability: The authors note that the DRL approach may not scale well to more complex vehicle models or suspension systems. Exploring ways to improve the scalability of the method would be an important next step.
-
Real-world Robustness: While the DRL-based system performed well in the real-world experiments, the authors acknowledge the need for further testing and validation to ensure its robustness under a wider range of real-world conditions.
-
Computational Complexity: The training of the DRL model can be computationally intensive, which may be a practical challenge for some real-world applications. Investigating ways to reduce the computational burden would be valuable.
Overall, the research presented in this paper represents a significant contribution to the field of sim-to-real transfer learning for active suspension control. The insights and techniques developed in this work could have wider applications in the field of reinforcement learning for robotics and autonomous systems.
Conclusion
This research paper demonstrates the potential of using deep reinforcement learning to effectively transfer active suspension control from simulation to the real world. By addressing the sim-to-real gap through techniques like domain randomization and motion transformer-based trajectory transfer, the authors have shown that DRL-based systems can outperform traditional control approaches in terms of ride quality and responsiveness.
The successful application of DRL to this problem highlights the growing capabilities of AI-driven control systems and their ability to tackle complex real-world challenges. As the field of reinforcement learning continues to evolve, this work could pave the way for further advancements in the deployment of autonomous systems in diverse domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
Autonomous Control of a Novel Closed Chain Five Bar Active Suspension via Deep Reinforcement Learning
Nishesh Singh, Sidharth Ramesh, Abhishek Shankar, Jyotishka Duttagupta, Leander Stephen D'Souza, Sanjay Singh
0
0
Planetary exploration requires traversal in environments with rugged terrains. In addition, Mars rovers and other planetary exploration robots often carry sensitive scientific experiments and components onboard, which must be protected from mechanical harm. This paper deals with an active suspension system focused on chassis stabilisation and an efficient traversal method while encountering unavoidable obstacles. Soft Actor-Critic (SAC) was applied along with Proportional Integral Derivative (PID) control to stabilise the chassis and traverse large obstacles at low speeds. The model uses the rover's distance from surrounding obstacles, the height of the obstacle, and the chassis' orientation to actuate the control links of the suspension accurately. Simulations carried out in the Gazebo environment are used to validate the proposed active system.
7/2/2024

Sim-to-real Transfer of Deep Reinforcement Learning Agents for Online Coverage Path Planning
Arvi Jonnarth, Ola Johansson, Michael Felsberg
0
0
Sim-to-real transfer presents a difficult challenge, where models trained in simulation are to be deployed in the real world. The distribution shift between the two settings leads to biased representations of the perceived real-world environment, and thus to suboptimal predictions. In this work, we tackle the challenge of sim-to-real transfer of reinforcement learning (RL) agents for coverage path planning (CPP). In CPP, the task is for a robot to find a path that visits every point of a confined area. Specifically, we consider the case where the environment is unknown, and the agent needs to plan the path online while mapping the environment. We bridge the sim-to-real gap through a semi-virtual environment with a simulated sensor and obstacles, while including real robot kinematics and real-time aspects. We investigate what level of fine-tuning is needed for adapting to a realistic setting, comparing to an agent trained solely in simulation. We find that a high model inference frequency is sufficient for reducing the sim-to-real gap, while fine-tuning degrades performance initially. By training the model in simulation and deploying it at a high inference frequency, we transfer state-of-the-art results from simulation to the real domain, where direct learning would take in the order of weeks with manual interaction, i.e., would be completely infeasible.
6/10/2024
🤿
A Platform-Agnostic Deep Reinforcement Learning Framework for Effective Sim2Real Transfer in Autonomous Driving
Dianzhao Li, Ostap Okhrin
0
0
Deep Reinforcement Learning (DRL) has shown remarkable success in solving complex tasks across various research fields. However, transferring DRL agents to the real world is still challenging due to the significant discrepancies between simulation and reality. To address this issue, we propose a robust DRL framework that leverages platform-dependent perception modules to extract task-relevant information and train a lane-following and overtaking agent in simulation. This framework facilitates the seamless transfer of the DRL agent to new simulated environments and the real world with minimal effort. We evaluate the performance of the agent in various driving scenarios in both simulation and the real world, and compare it to human players and the PID baseline in simulation. Our proposed framework significantly reduces the gaps between different platforms and the Sim2Real gap, enabling the trained agent to achieve similar performance in both simulation and the real world, driving the vehicle effectively.
5/1/2024
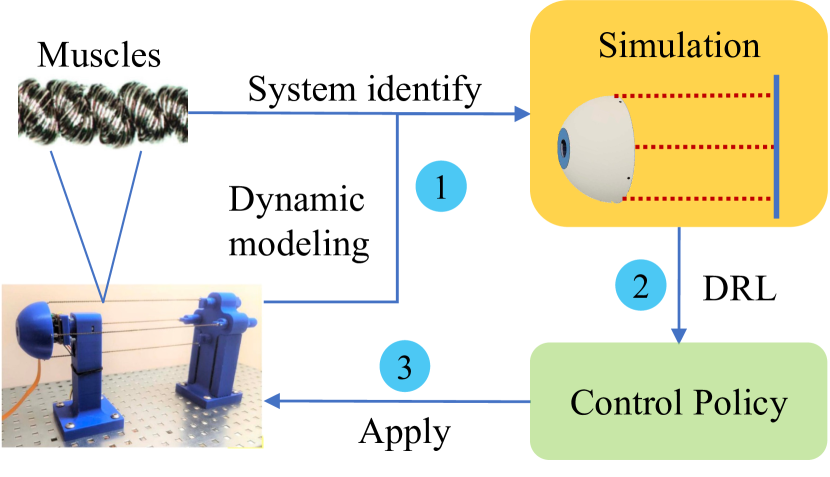
An Efficient Learning Control Framework With Sim-to-Real for String-Type Artificial Muscle-Driven Robotic Systems
Jiyue Tao, Yunsong Zhang, Sunil Kumar Rajendran, Feitian Zhang, Dexin Zhao, Tongsheng Shen
0
0
Robotic systems driven by artificial muscles present unique challenges due to the nonlinear dynamics of actuators and the complex designs of mechanical structures. Traditional model-based controllers often struggle to achieve desired control performance in such systems. Deep reinforcement learning (DRL), a trending machine learning technique widely adopted in robot control, offers a promising alternative. However, integrating DRL into these robotic systems faces significant challenges, including the requirement for large amounts of training data and the inevitable sim-to-real gap when deployed to real-world robots. This paper proposes an efficient reinforcement learning control framework with sim-to-real transfer to address these challenges. Bootstrap and augmentation enhancements are designed to improve the data efficiency of baseline DRL algorithms, while a sim-to-real transfer technique, namely randomization of muscle dynamics, is adopted to bridge the gap between simulation and real-world deployment. Extensive experiments and ablation studies are conducted utilizing two string-type artificial muscle-driven robotic systems including a two degree-of-freedom robotic eye and a parallel robotic wrist, the results of which demonstrate the effectiveness of the proposed learning control strategy.
6/10/2024