Enabling robots to follow abstract instructions and complete complex dynamic tasks

0

Sign in to get full access
Overview
- Discusses research on enabling robots to follow abstract instructions and complete complex dynamic tasks
- Explores techniques for robotic learning, physical reasoning, and embodied instruction following
- Introduces novel approaches to bridge the gap between high-level instructions and low-level robot control
Plain English Explanation
This research paper explores ways to enable robots to better understand and carry out complex instructions and tasks. Rather than just following a set of predefined steps, the goal is to develop robots that can interpret abstract, high-level instructions and then figure out the best way to complete the requested task, even in dynamic and unpredictable environments.
The researchers draw inspiration from recent advancements in vision-language models, language-based reasoning for grasping, and embodied instruction following. They investigate novel techniques that allow robots to learn from basic skills and build up more complex capabilities, similar to how RoboCoder enables step-by-step learning.
The key idea is to help robots better bridge the gap between high-level instructions expressed in natural language and the low-level control signals needed to execute those instructions. By developing more sophisticated language understanding and reasoning capabilities, robots can become more flexible and adaptable, able to tackle a wider range of tasks and challenges.
Technical Explanation
The paper introduces a novel approach to enable robots to follow abstract instructions and complete complex dynamic tasks. The researchers draw on recent advancements in vision-language models, language-based reasoning for grasping, and embodied instruction following.
The proposed system leverages techniques that allow robots to learn from basic skills and build up more complex capabilities, similar to the RoboCoder approach. This enables the robots to better bridge the gap between high-level instructions expressed in natural language and the low-level control signals needed to execute those instructions.
Key components of the system include:
- Improved natural language understanding and reasoning capabilities to interpret abstract instructions
- Mechanisms for mapping high-level instructions to appropriate low-level robot actions and control signals
- Techniques for learning and adapting robot behaviors in dynamic environments
Through extensive experiments, the researchers demonstrate the effectiveness of their approach in enabling robots to successfully complete a variety of complex tasks, even in the face of uncertainty and changing conditions.
Critical Analysis
The paper presents a compelling approach to enabling more flexible and capable robot behavior, but it also acknowledges several limitations and areas for further research.
One key challenge is the need to further improve the natural language understanding and reasoning capabilities of the system. While the proposed techniques show promise, there is still room for advancement in bridging the gap between high-level instructions and low-level robot control.
Additionally, the paper notes that the system's performance may be constrained by the diversity and quality of the training data used. Expanding the breadth of tasks and environments represented in the training data could help the robots become more adaptable and robust.
Future research could also explore ways to make the system more efficient and scalable, particularly when dealing with complex, dynamic tasks that require rapid decision-making and adaptation. Domain-specific fine-tuning of large language models may be one promising avenue to address this challenge.
Overall, this research represents an important step forward in the quest to develop more capable and versatile robotic systems that can better understand and execute complex instructions in real-world settings.
Conclusion
This paper presents a novel approach to enabling robots to follow abstract instructions and complete complex dynamic tasks. By drawing on recent advancements in vision-language models, language-based reasoning, and embodied instruction following, the researchers have developed techniques that allow robots to better bridge the gap between high-level instructions and low-level control.
The key innovations include improved natural language understanding, mechanisms for mapping instructions to appropriate robot actions, and learning methods that enable adaptation to dynamic environments. While the system shows promising results, the paper also highlights areas for further research and development, such as enhancing language reasoning capabilities and improving scalability.
As robots become increasingly integrated into our daily lives, the ability to follow abstract instructions and tackle complex, unpredictable tasks will be crucial for their widespread adoption and effective deployment. This research represents an important step towards realizing that vision, with the potential to unlock new possibilities for human-robot collaboration and interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enabling robots to follow abstract instructions and complete complex dynamic tasks
Ruaridh Mon-Williams, Gen Li, Ran Long, Wenqian Du, Chris Lucas
Completing complex tasks in unpredictable settings like home kitchens challenges robotic systems. These challenges include interpreting high-level human commands, such as make me a hot beverage and performing actions like pouring a precise amount of water into a moving mug. To address these challenges, we present a novel framework that combines Large Language Models (LLMs), a curated Knowledge Base, and Integrated Force and Visual Feedback (IFVF). Our approach interprets abstract instructions, performs long-horizon tasks, and handles various uncertainties. It utilises GPT-4 to analyse the user's query and surroundings, then generates code that accesses a curated database of functions during execution. It translates abstract instructions into actionable steps. Each step involves generating custom code by employing retrieval-augmented generalisation to pull IFVF-relevant examples from the Knowledge Base. IFVF allows the robot to respond to noise and disturbances during execution. We use coffee making and plate decoration to demonstrate our approach, including components ranging from pouring to drawer opening, each benefiting from distinct feedback types and methods. This novel advancement marks significant progress toward a scalable, efficient robotic framework for completing complex tasks in uncertain environments. Our findings are illustrated in an accompanying video and supported by an open-source GitHub repository (released upon paper acceptance).
Read more6/18/2024

0
Interpreting and learning voice commands with a Large Language Model for a robot system
Stanislau Stankevich, Wojciech Dudek
Robots are increasingly common in industry and daily life, such as in nursing homes where they can assist staff. A key challenge is developing intuitive interfaces for easy communication. The use of Large Language Models (LLMs) like GPT-4 has enhanced robot capabilities, allowing for real-time interaction and decision-making. This integration improves robots' adaptability and functionality. This project focuses on merging LLMs with databases to improve decision-making and enable knowledge acquisition for request interpretation problems.
Read more8/1/2024
0
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
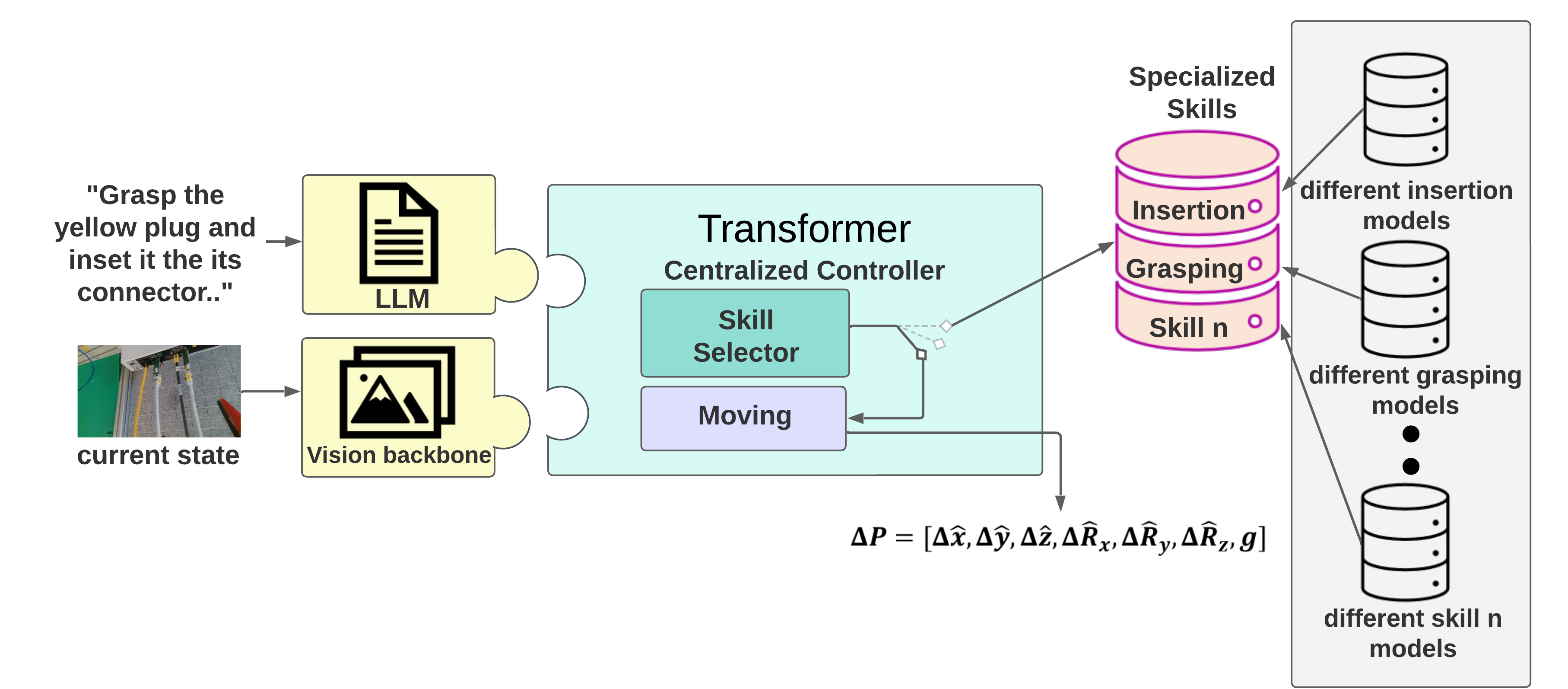
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
Read more6/26/2024

0
RoboCoder: Robotic Learning from Basic Skills to General Tasks with Large Language Models
Jingyao Li, Pengguang Chen, Sitong Wu, Chuanyang Zheng, Hong Xu, Jiaya Jia
The emergence of Large Language Models (LLMs) has improved the prospects for robotic tasks. However, existing benchmarks are still limited to single tasks with limited generalization capabilities. In this work, we introduce a comprehensive benchmark and an autonomous learning framework, RoboCoder aimed at enhancing the generalization capabilities of robots in complex environments. Unlike traditional methods that focus on single-task learning, our research emphasizes the development of a general-purpose robotic coding algorithm that enables robots to leverage basic skills to tackle increasingly complex tasks. The newly proposed benchmark consists of 80 manually designed tasks across 7 distinct entities, testing the models' ability to learn from minimal initial mastery. Initial testing revealed that even advanced models like GPT-4 could only achieve a 47% pass rate in three-shot scenarios with humanoid entities. To address these limitations, the RoboCoder framework integrates Large Language Models (LLMs) with a dynamic learning system that uses real-time environmental feedback to continuously update and refine action codes. This adaptive method showed a remarkable improvement, achieving a 36% relative improvement. Our codes will be released.
Read more6/7/2024