Enhancing Supermarket Robot Interaction: A Multi-Level LLM Conversational Interface for Handling Diverse Customer Intents

0

Sign in to get full access
Overview
- This paper presents a multi-level large language model (LLM) conversational interface designed to enhance interactions between customers and supermarket robots.
- The system is capable of handling diverse customer intents, ranging from product inquiries to task assistance, through a hierarchical conversational approach.
- The research explores the integration of LLMs with robotic systems to improve the user experience and provide more natural, contextual interactions.
Plain English Explanation
The paper describes a new type of conversational interface for supermarket robots that uses advanced language models to understand and respond to customers more effectively. Typically, supermarket robots have limited capabilities when it comes to engaging with customers and understanding their diverse needs and requests. This new system aims to address that by using multiple large language models (LLMs) - powerful AI models trained on vast amounts of text data - to create a more natural, intuitive interaction.
The key idea is to have different LLMs handle different types of customer requests, from finding products to requesting assistance with tasks. This "multi-level" approach allows the robot to better understand the full context of each customer interaction and provide more relevant and helpful responses.
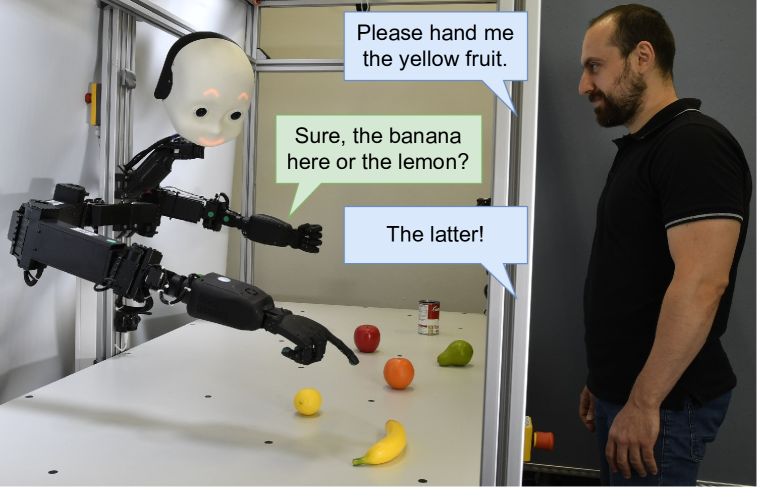
For example, if a customer asks "Where can I find the milk?", the robot's language model might recognize this as a product inquiry and provide directions to the dairy aisle. But if the customer then says "And can you help me reach the top shelf?", the robot would switch to a different language model specialized for handling task assistance requests. This allows for a more seamless, conversational flow compared to traditional robotic systems with limited dialogue capabilities.
Technical Explanation
The paper proposes a multi-level LLM-based conversational interface for supermarket robots that can handle a diverse range of customer intents. The system uses a hierarchical architecture with multiple specialized LLMs, each trained on different types of customer interactions, such as product inquiries, task assistance requests, and general chitchat.
An intent classifier first analyzes the customer's input and selects the appropriate LLM to generate a relevant response. The selected LLM then produces a contextual reply, which is further processed by a language generation module to ensure coherence and fluency. This multi-level approach allows the system to dynamically adapt to the diverse needs and conversational flows of customer interactions in a supermarket setting.
The authors evaluate the system's performance through customer interaction trials, demonstrating its ability to handle a broader range of customer intents compared to traditional robotic interfaces. The results suggest that this integrated LLM-based approach can significantly enhance the overall user experience and engagement with supermarket robots.
Critical Analysis
The paper presents a promising approach to improving the conversational capabilities of supermarket robots, which is an important step towards more natural and intuitive human-robot interactions in retail environments. The use of multiple specialized LLMs to handle diverse customer intents is a well-designed solution to the limitations of traditional robotic systems.
However, the paper does not discuss potential challenges or limitations of this approach, such as the complexity of training and maintaining multiple LLMs, the potential for errors or inconsistencies in the intent classification process, or the scalability of the system to larger retail settings. Additionally, the paper does not address potential privacy or ethical concerns related to the use of LLMs in customer-facing applications.
Further research could explore ways to streamline the integration of LLMs into robotic systems, investigate techniques for handling ambiguous or multi-intent customer interactions, and assess the long-term impacts of such AI-powered conversational interfaces on customer satisfaction and engagement in retail environments.
Conclusion
This paper presents a novel multi-level LLM-based conversational interface for supermarket robots that aims to enhance the user experience by better understanding and responding to diverse customer intents. The hierarchical architecture with specialized LLMs demonstrates the potential of integrating advanced language models into robotic systems to enable more natural, contextual interactions.
While the research shows promising results, further exploration of the challenges and limitations of this approach, as well as its broader implications for the retail industry, would be valuable. As LLMs continue to advance and become more integrated with robotic systems, this work represents an important step towards improving the human-robot interaction in supermarket and other commercial settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhancing Supermarket Robot Interaction: A Multi-Level LLM Conversational Interface for Handling Diverse Customer Intents
Chandran Nandkumar, Luka Peternel
This paper presents the design and evaluation of a novel multi-level LLM interface for supermarket robots to assist customers. The proposed interface allows customers to convey their needs through both generic and specific queries. While state-of-the-art systems like OpenAI's GPTs are highly adaptable and easy to build and deploy, they still face challenges such as increased response times and limitations in strategic control of the underlying model for tailored use-case and cost optimization. Driven by the goal of developing faster and more efficient conversational agents, this paper advocates for using multiple smaller, specialized LLMs fine-tuned to handle different user queries based on their specificity and user intent. We compare this approach to a specialized GPT model powered by GPT-4 Turbo, using the Artificial Social Agent Questionnaire (ASAQ) and qualitative participant feedback in a counterbalanced within-subjects experiment. Our findings show that our multi-LLM chatbot architecture outperformed the benchmarked GPT model across all 13 measured criteria, with statistically significant improvements in four key areas: performance, user satisfaction, user-agent partnership, and self-image enhancement. The paper also presents a method for supermarket robot navigation by mapping the final chatbot response to correct shelf numbers, enabling the robot to sequentially navigate towards the respective products, after which lower-level robot perception, control, and planning can be used for automated object retrieval. We hope this work encourages more efforts into using multiple, specialized smaller models instead of relying on a single powerful, but more expensive and slower model.
Read more6/18/2024
0
When Robots Get Chatty: Grounding Multimodal Human-Robot Conversation and Collaboration
Philipp Allgeuer, Hassan Ali, Stefan Wermter
We investigate the use of Large Language Models (LLMs) to equip neural robotic agents with human-like social and cognitive competencies, for the purpose of open-ended human-robot conversation and collaboration. We introduce a modular and extensible methodology for grounding an LLM with the sensory perceptions and capabilities of a physical robot, and integrate multiple deep learning models throughout the architecture in a form of system integration. The integrated models encompass various functions such as speech recognition, speech generation, open-vocabulary object detection, human pose estimation, and gesture detection, with the LLM serving as the central text-based coordinating unit. The qualitative and quantitative results demonstrate the huge potential of LLMs in providing emergent cognition and interactive language-oriented control of robots in a natural and social manner.
Read more7/2/2024
🗣️
0
Question Suggestion for Conversational Shopping Assistants Using Product Metadata
Nikhita Vedula, Oleg Rokhlenko, Shervin Malmasi
Digital assistants have become ubiquitous in e-commerce applications, following the recent advancements in Information Retrieval (IR), Natural Language Processing (NLP) and Generative Artificial Intelligence (AI). However, customers are often unsure or unaware of how to effectively converse with these assistants to meet their shopping needs. In this work, we emphasize the importance of providing customers a fast, easy to use, and natural way to interact with conversational shopping assistants. We propose a framework that employs Large Language Models (LLMs) to automatically generate contextual, useful, answerable, fluent and diverse questions about products, via in-context learning and supervised fine-tuning. Recommending these questions to customers as helpful suggestions or hints to both start and continue a conversation can result in a smoother and faster shopping experience with reduced conversation overhead and friction. We perform extensive offline evaluations, and discuss in detail about potential customer impact, and the type, length and latency of our generated product questions if incorporated into a real-world shopping assistant.
Read more5/6/2024

0
Interpreting and learning voice commands with a Large Language Model for a robot system
Stanislau Stankevich, Wojciech Dudek
Robots are increasingly common in industry and daily life, such as in nursing homes where they can assist staff. A key challenge is developing intuitive interfaces for easy communication. The use of Large Language Models (LLMs) like GPT-4 has enhanced robot capabilities, allowing for real-time interaction and decision-making. This integration improves robots' adaptability and functionality. This project focuses on merging LLMs with databases to improve decision-making and enable knowledge acquisition for request interpretation problems.
Read more8/1/2024