Ensuring Both Positivity and Stability Using Sector-Bounded Nonlinearity for Systems with Neural Network Controllers

0
Sign in to get full access
Overview
- This paper proposes a framework for designing neural network controllers that ensure both positive invariance and stability for nonlinear dynamical systems.
- The authors introduce a sector-bounded nonlinearity approach that constrains the neural network's activation function to guarantee these desired properties.
- The proposed method is applicable to both state-feedback and output-feedback control settings, and the authors provide stability analysis and synthesis conditions.
- The paper also discusses the implications of the weight dynamics of the neural network on the closed-loop system's properties.
Plain English Explanation
This research paper presents a new way to design neural network controllers that can reliably control complex, nonlinear systems while ensuring two important properties: positivity and stability.
Positivity means the system's output will always remain positive, even in the face of disturbances or changes. Stability means the system will return to a desired equilibrium point and not diverge or become unstable over time. Achieving both of these properties can be challenging, especially when using neural networks, which are powerful but can also be unpredictable.
The key innovation in this paper is a "sector-bounded nonlinearity" approach. This constrains how the neural network's activation function can behave, guaranteeing the necessary positivity and stability properties. The authors show this method works for both cases where the full system state is available for feedback (state-feedback) and where only partial information is available (output-feedback).
Additionally, the paper examines how the neural network's own internal weight dynamics impact the overall system's properties. This is an important consideration when designing and verifying neural network controllers for real-world applications.
Technical Explanation
The authors propose a framework for designing neural network controllers that ensure both positive invariance and stability for nonlinear dynamical systems. They introduce a sector-bounded nonlinearity approach, where the neural network's activation function is constrained to lie within a specified sector. This guarantees the desired positivity and stability properties of the closed-loop system.
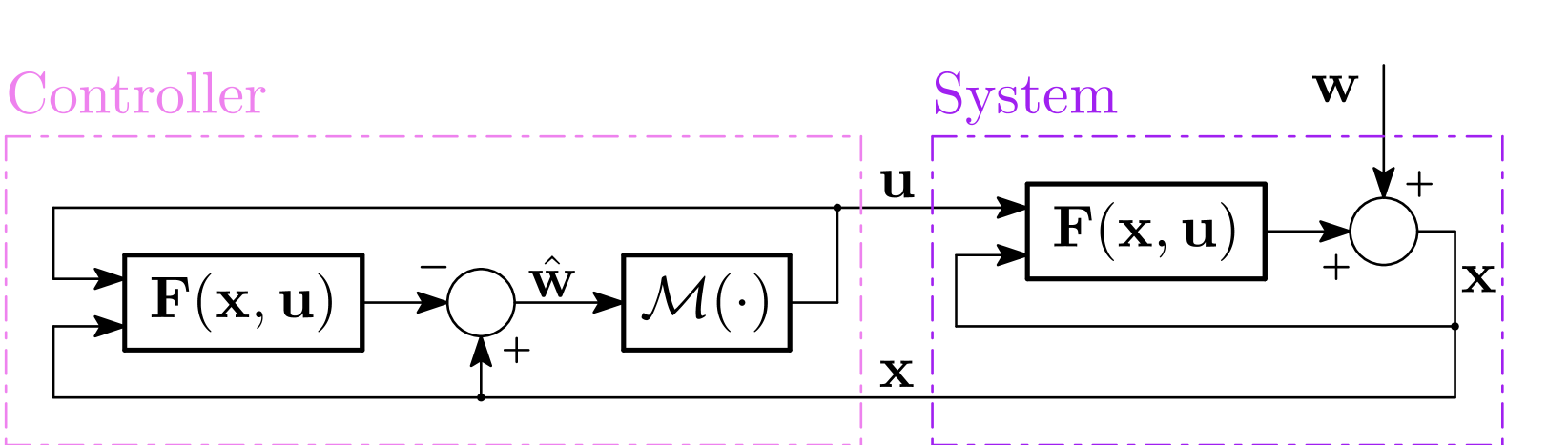
The paper considers both state-feedback and output-feedback control settings. For the state-feedback case, the authors provide stability analysis and synthesis conditions that ensure the closed-loop system is positive and stable. For the output-feedback case, they derive similar results by utilizing an observer-based controller structure.
Furthermore, the paper investigates the implications of the neural network's weight dynamics on the closed-loop system's properties. The authors show that the weight dynamics can affect the positivity and stability of the overall system, and they provide guidelines for designing the neural network architecture and learning algorithm to preserve these desirable characteristics.
The proposed approach is demonstrated through numerical simulations, showcasing its effectiveness in controlling nonlinear systems while satisfying the required positivity and stability criteria.
Critical Analysis
The authors have presented a comprehensive framework for designing neural network controllers that guarantee both positivity and stability for nonlinear dynamical systems. This is a valuable contribution, as these properties are crucial for the safe and reliable deployment of neural network-based control systems in real-world applications.
One potential limitation of the proposed approach is that the sector-bounded nonlinearity constraint may limit the expressiveness of the neural network, potentially reducing its ability to capture complex nonlinearities in the system. The authors acknowledge this and suggest that further research is needed to explore alternative approaches that can maintain the desired properties while allowing for more flexible neural network architectures.
Additionally, the paper focuses on continuous-time systems, and it would be interesting to see if the proposed methods can be extended to discrete-time or hybrid systems, which are also commonly encountered in practical control applications.
Another area for further research could be the integration of this framework with other techniques for enhancing the stability and robustness of neural network controllers, such as Lyapunov-based methods or dissipativity-based synthesis. Combining multiple approaches may lead to even more reliable and versatile neural network control systems.
Conclusion
This paper presents a novel framework for designing neural network controllers that ensure both positive invariance and stability for nonlinear dynamical systems. The key innovation is the sector-bounded nonlinearity approach, which constrains the neural network's activation function to guarantee the desired properties. The authors provide stability analysis and synthesis conditions for both state-feedback and output-feedback control settings, as well as insights into the implications of the neural network's weight dynamics.
The proposed method represents an important step towards the reliable and safe deployment of neural network-based control systems in real-world applications, where maintaining positivity and stability is critical. The work opens up avenues for further research to enhance the flexibility and robustness of these controllers, ultimately expanding the practical applications of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Ensuring Both Positivity and Stability Using Sector-Bounded Nonlinearity for Systems with Neural Network Controllers
Hamidreza Montazeri Hedesh, Milad Siami
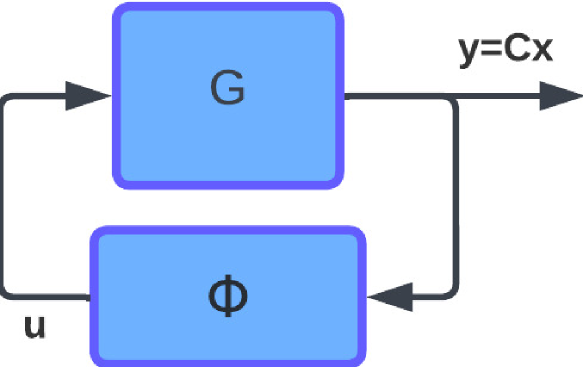
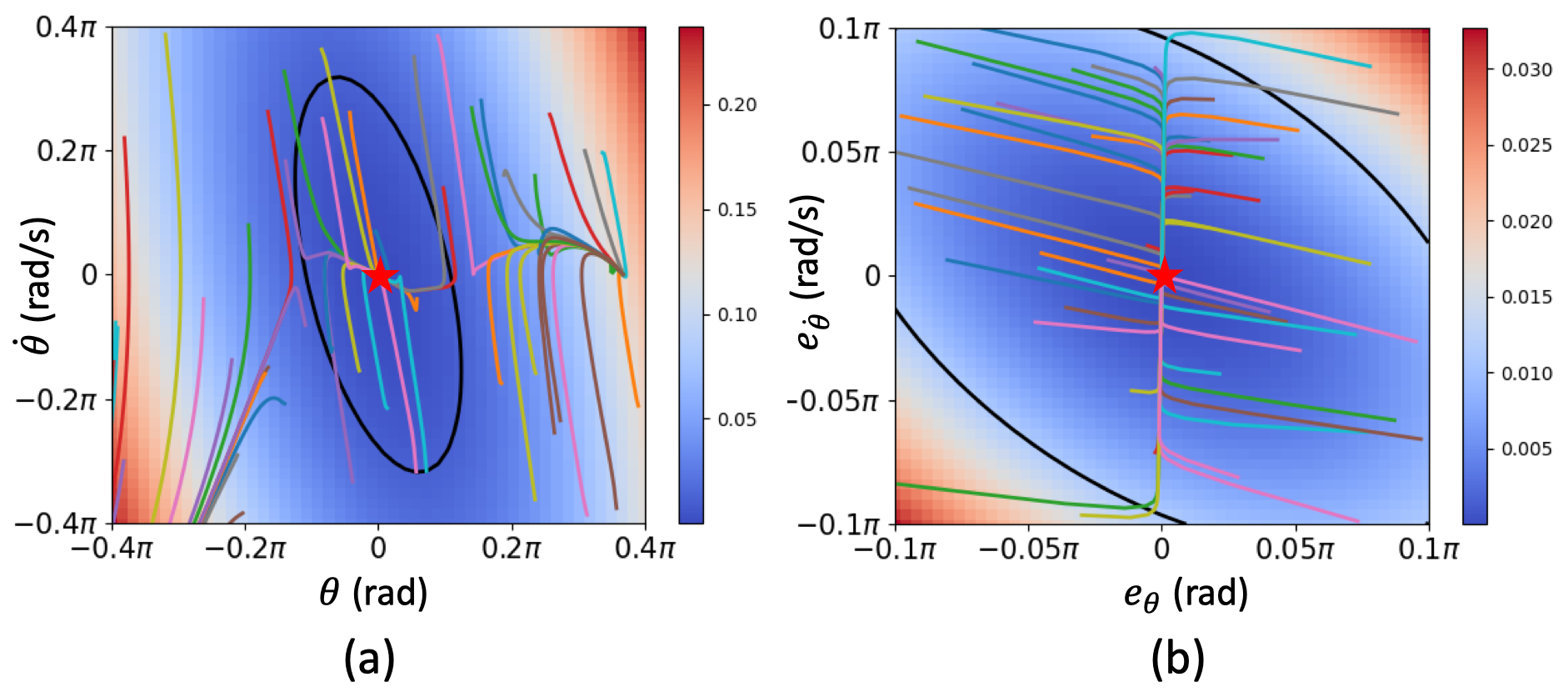
This paper introduces a novel method for the stability analysis of positive feedback systems with a class of fully connected feedforward neural networks (FFNN) controllers. By establishing sector bounds for fully connected FFNNs without biases, we present a stability theorem that demonstrates the global exponential stability of linear systems under fully connected FFNN control. Utilizing principles from positive Lur'e systems and the positive Aizerman conjecture, our approach effectively addresses the challenge of ensuring stability in highly nonlinear systems. The crux of our method lies in maintaining sector bounds that preserve the positivity and Hurwitz property of the overall Lur'e system. We showcase the practical applicability of our methodology through its implementation in a linear system managed by a FFNN trained on output feedback controller data, highlighting its potential for enhancing stability in dynamic systems.
Read more6/19/2024
0
Lyapunov-stable Neural Control for State and Output Feedback: A Novel Formulation for Efficient Synthesis and Verification
Lujie Yang, Hongkai Dai, Zhouxing Shi, Cho-Jui Hsieh, Russ Tedrake, Huan Zhang
Learning-based neural network (NN) control policies have shown impressive empirical performance in a wide range of tasks in robotics and control. However, formal (Lyapunov) stability guarantees over the region-of-attraction (ROA) for NN controllers with nonlinear dynamical systems are challenging to obtain, and most existing approaches rely on expensive solvers such as sums-of-squares (SOS), mixed-integer programming (MIP), or satisfiability modulo theories (SMT). In this paper, we demonstrate a new framework for learning NN controllers together with Lyapunov certificates using fast empirical falsification and strategic regularizations. We propose a novel formulation that defines a larger verifiable region-of-attraction (ROA) than shown in the literature, and refines the conventional restrictive constraints on Lyapunov derivatives to focus only on certifiable ROAs. The Lyapunov condition is rigorously verified post-hoc using branch-and-bound with scalable linear bound propagation-based NN verification techniques. The approach is efficient and flexible, and the full training and verification procedure is accelerated on GPUs without relying on expensive solvers for SOS, MIP, nor SMT. The flexibility and efficiency of our framework allow us to demonstrate Lyapunov-stable output feedback control with synthesized NN-based controllers and NN-based observers with formal stability guarantees, for the first time in literature. Source code at https://github.com/Verified-Intelligence/Lyapunov_Stable_NN_Controllers
Read more6/6/2024
0
Learning to Boost the Performance of Stable Nonlinear Systems
Luca Furieri, Clara Luc'ia Galimberti, Giancarlo Ferrari-Trecate
The growing scale and complexity of safety-critical control systems underscore the need to evolve current control architectures aiming for the unparalleled performances achievable through state-of-the-art optimization and machine learning algorithms. However, maintaining closed-loop stability while boosting the performance of nonlinear control systems using data-driven and deep-learning approaches stands as an important unsolved challenge. In this paper, we tackle the performance-boosting problem with closed-loop stability guarantees. Specifically, we establish a synergy between the Internal Model Control (IMC) principle for nonlinear systems and state-of-the-art unconstrained optimization approaches for learning stable dynamics. Our methods enable learning over arbitrarily deep neural network classes of performance-boosting controllers for stable nonlinear systems; crucially, we guarantee L_p closed-loop stability even if optimization is halted prematurely, and even when the ground-truth dynamics are unknown, with vanishing conservatism in the class of stabilizing policies as the model uncertainty is reduced to zero. We discuss the implementation details of the proposed control schemes, including distributed ones, along with the corresponding optimization procedures, demonstrating the potential of freely shaping the cost functions through several numerical experiments.
Read more9/30/2024

0
Actor-Critic Physics-informed Neural Lyapunov Control
Jiarui Wang, Mahyar Fazlyab
Designing control policies for stabilization tasks with provable guarantees is a long-standing problem in nonlinear control. A crucial performance metric is the size of the resulting region of attraction, which essentially serves as a robustness margin of the closed-loop system against uncertainties. In this paper, we propose a new method to train a stabilizing neural network controller along with its corresponding Lyapunov certificate, aiming to maximize the resulting region of attraction while respecting the actuation constraints. Crucial to our approach is the use of Zubov's Partial Differential Equation (PDE), which precisely characterizes the true region of attraction of a given control policy. Our framework follows an actor-critic pattern where we alternate between improving the control policy (actor) and learning a Zubov function (critic). Finally, we compute the largest certifiable region of attraction by invoking an SMT solver after the training procedure. Our numerical experiments on several design problems show consistent and significant improvements in the size of the resulting region of attraction.
Read more8/2/2024