Verification of Neural Network Control Systems in Continuous Time

0

Sign in to get full access
Overview
- Presents a method for verifying the safety and stability of neural network-based control systems in continuous-time
- Combines closed-loop verification and reachability analysis to ensure the system remains within desired bounds
- Demonstrates the approach on a quadrotor control task and compares it to baseline methods
Plain English Explanation
This paper introduces a new technique for ensuring the safety and stability of control systems that use neural networks. Control systems are used in a wide variety of applications, from robots to aircraft, to keep the system operating within desired bounds. However, neural networks, which are a type of machine learning model, can sometimes behave in unpredictable ways, making it challenging to verify their safety.
The researchers' approach combines two key concepts - closed-loop verification and reachability analysis. Closed-loop verification checks that the overall control system, including the neural network, maintains the desired behavior. Reachability analysis determines the set of states the system can reach, allowing the researchers to ensure it stays within safe bounds.
To demonstrate their method, the researchers apply it to the task of controlling a quadrotor, a type of drone with four rotors. They show that their approach can verify the safety and stability of the quadrotor control system, even with a neural network as the controller. This is an important step towards using neural networks in safety-critical applications, where it is essential to guarantee the system will behave as expected.
Technical Explanation
The paper presents a framework for verifying the safety and stability of neural network-based control systems in continuous-time. The key components are:
-
Closed-Loop Verification: The researchers use Lyapunov-based techniques to analyze the stability and safety of the overall closed-loop system, including the neural network controller and the plant dynamics.
-
Reachability Analysis: They leverage reachability analysis to bound the set of states the system can reach, ensuring it remains within desired constraints.
-
Control Barrier Functions: The researchers employ control barrier functions to guarantee safety and stability properties of the closed-loop system.
The paper demonstrates the proposed approach on a quadrotor control task, where the neural network acts as the controller. The results show that the method can effectively verify the safety and stability of the quadrotor system, outperforming baseline techniques in terms of the conservativeness of the computed safety guarantees.
Critical Analysis
The paper presents a comprehensive framework for verifying the safety and stability of neural network-based control systems in continuous-time. The combination of closed-loop verification and reachability analysis is a promising approach to addressing the challenges of using neural networks in safety-critical applications.
One potential limitation of the method is the computational complexity, as the reachability analysis and Lyapunov-based stability verification can be computationally intensive, especially for high-dimensional systems. The researchers mention that future work should focus on improving the scalability of the approach to make it more practical for real-world applications.
Additionally, the paper focuses on deterministic continuous-time systems, but many real-world control systems may involve stochastic or hybrid dynamics. Extending the proposed framework to handle these more general classes of systems could be an interesting area for future research.
Overall, the paper makes a valuable contribution to the field of neural network verification and control, providing a solid foundation for deploying safe and stable neural network controllers in safety-critical applications.
Conclusion
This paper presents a novel approach for verifying the safety and stability of neural network-based control systems in continuous-time. By combining closed-loop verification and reachability analysis, the researchers have developed a comprehensive framework that can provide formal guarantees on the system's behavior, even in the presence of a neural network controller.
The demonstrated results on a quadrotor control task highlight the effectiveness of the proposed method and its potential for real-world applications. As neural networks continue to be increasingly used in safety-critical systems, techniques like the one described in this paper will be essential for ensuring their reliable and predictable operation.
Overall, this work represents an important step forward in the field of neural network verification and control, paving the way for the safe and widespread deployment of these powerful machine learning models in a variety of industries and applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Verification of Neural Network Control Systems in Continuous Time
Ali ArjomandBigdeli, Andrew Mata, Stanley Bak
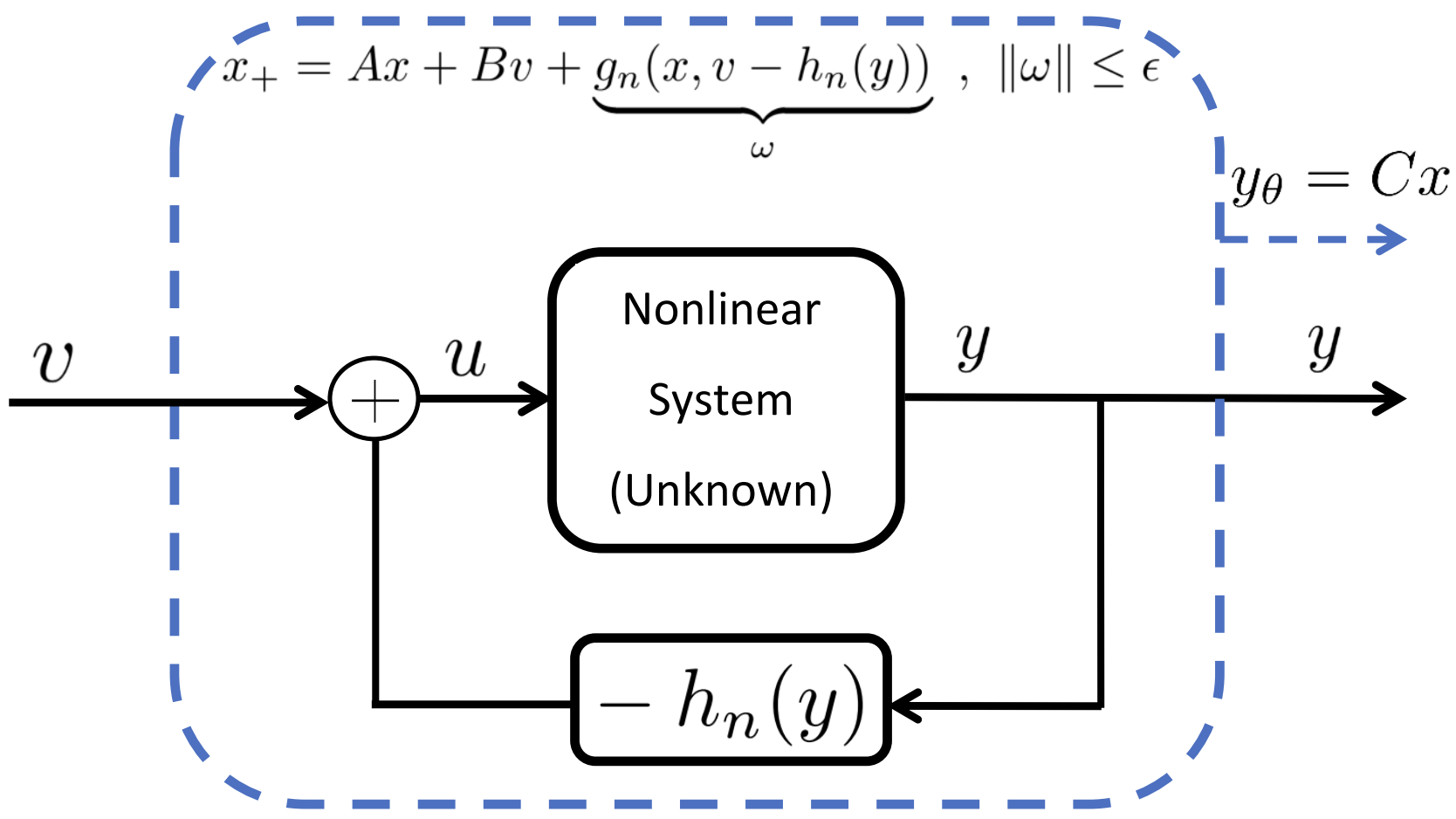
Neural network controllers are currently being proposed for use in many safety-critical tasks. Most analysis methods for neural network control systems assume a fixed control period. In control theory, higher frequency usually improves performance. However, for current analysis methods, increasing the frequency complicates verification. In the limit, when actuation is performed continuously, no existing neural network control systems verification methods are able to analyze the system. In this work, we develop the first verification method for continuously-actuated neural network control systems. We accomplish this by adding a level of abstraction to model the neural network controller. The abstraction is a piecewise linear model with added noise to account for local linearization error. The soundness of the abstraction can be checked using open-loop neural network verification tools, although we demonstrate bottlenecks in existing tools when handling the required specifications. We demonstrate the approach's efficacy by applying it to a vision-based autonomous airplane taxiing system and compare with a fixed frequency analysis baseline.
Read more6/4/2024
🧠
0
Provably Safe Neural Network Controllers via Differential Dynamic Logic
Samuel Teuber, Stefan Mitsch, Andr'e Platzer
While neural networks (NNs) have potential as autonomous controllers for Cyber-Physical Systems, verifying the safety of NN based control systems (NNCSs) poses significant challenges for the practical use of NNs, especially when safety is needed for unbounded time horizons. One reason is the intractability of analyzing NNs, ODEs and hybrid systems. To this end, we introduce VerSAILLE (Verifiably Safe AI via Logically Linked Envelopes): The first general approach that allows reusing control theory results for NNCS verification. By joining forces, we exploit the efficiency of NN verification tools while retaining the rigor of differential dynamic logic (dL). Based on provably safe control envelopes in dL, we derive specifications for the NN which is proven via NN verification. We show that a proof of the NN adhering to the specification is mirrored by a dL proof on the infinite-time safety of the NNCS. The NN verification properties resulting from hybrid systems typically contain nonlinear arithmetic and arbitrary logical structures while efficient NN verification merely supports linear constraints. To overcome this divide, we present Mosaic: An efficient, sound and complete verification approach for polynomial real arithmetic properties on piece-wise linear NNs. Mosaic partitions complex verification queries into simple queries and lifts off-the-shelf linear constraint tools to the nonlinear setting in a completeness-preserving manner by combining approximation with exact reasoning for counterexample regions. Our evaluation demonstrates the versatility of VerSAILLE and Mosaic: We prove infinite-time safety on the classical Vertical Airborne Collision Avoidance NNCS verification benchmark for two scenarios while (exhaustively) enumerating counterexample regions in unsafe scenarios. We also show that our approach significantly outperforms State-of-the-Art tools in closed-loop NNV.
Read more6/17/2024
0
Identification For Control Based on Neural Networks: Approximately Linearizable Models
Maxime Thieffry, Alexandre Hache, Mohamed Yagoubi, Philippe Chevrel
This work presents a control-oriented identification scheme for efficient control design and stability analysis of nonlinear systems. Neural networks are used to identify a discrete-time nonlinear state- space model to approximate time-domain input-output behavior of a nonlinear system. The network is constructed such that the identified model is approximately linearizable by feedback, ensuring that the control law trivially follows from the learning stage. After the identification and quasi-linearization procedures, linear control theory comes at hand to design robust controllers and study stability of the closed-loop system. The effectiveness and interest of the methodology are illustrated throughout the paper on popular benchmarks for system identification.
Read more9/25/2024
✅
0
Unifying Qualitative and Quantitative Safety Verification of DNN-Controlled Systems
Dapeng Zhi, Peixin Wang, Si Liu, Luke Ong, Min Zhang
The rapid advance of deep reinforcement learning techniques enables the oversight of safety-critical systems through the utilization of Deep Neural Networks (DNNs). This underscores the pressing need to promptly establish certified safety guarantees for such DNN-controlled systems. Most of the existing verification approaches rely on qualitative approaches, predominantly employing reachability analysis. However, qualitative verification proves inadequate for DNN-controlled systems as their behaviors exhibit stochastic tendencies when operating in open and adversarial environments. In this paper, we propose a novel framework for unifying both qualitative and quantitative safety verification problems of DNN-controlled systems. This is achieved by formulating the verification tasks as the synthesis of valid neural barrier certificates (NBCs). Initially, the framework seeks to establish almost-sure safety guarantees through qualitative verification. In cases where qualitative verification fails, our quantitative verification method is invoked, yielding precise lower and upper bounds on probabilistic safety across both infinite and finite time horizons. To facilitate the synthesis of NBCs, we introduce their $k$-inductive variants. We also devise a simulation-guided approach for training NBCs, aiming to achieve tightness in computing precise certified lower and upper bounds. We prototype our approach into a tool called $textsf{UniQQ}$ and showcase its efficacy on four classic DNN-controlled systems.
Read more4/3/2024