Error Mitigation for TDoA UWB Indoor Localization using Unsupervised Machine Learning
2404.06824
0
0

Abstract
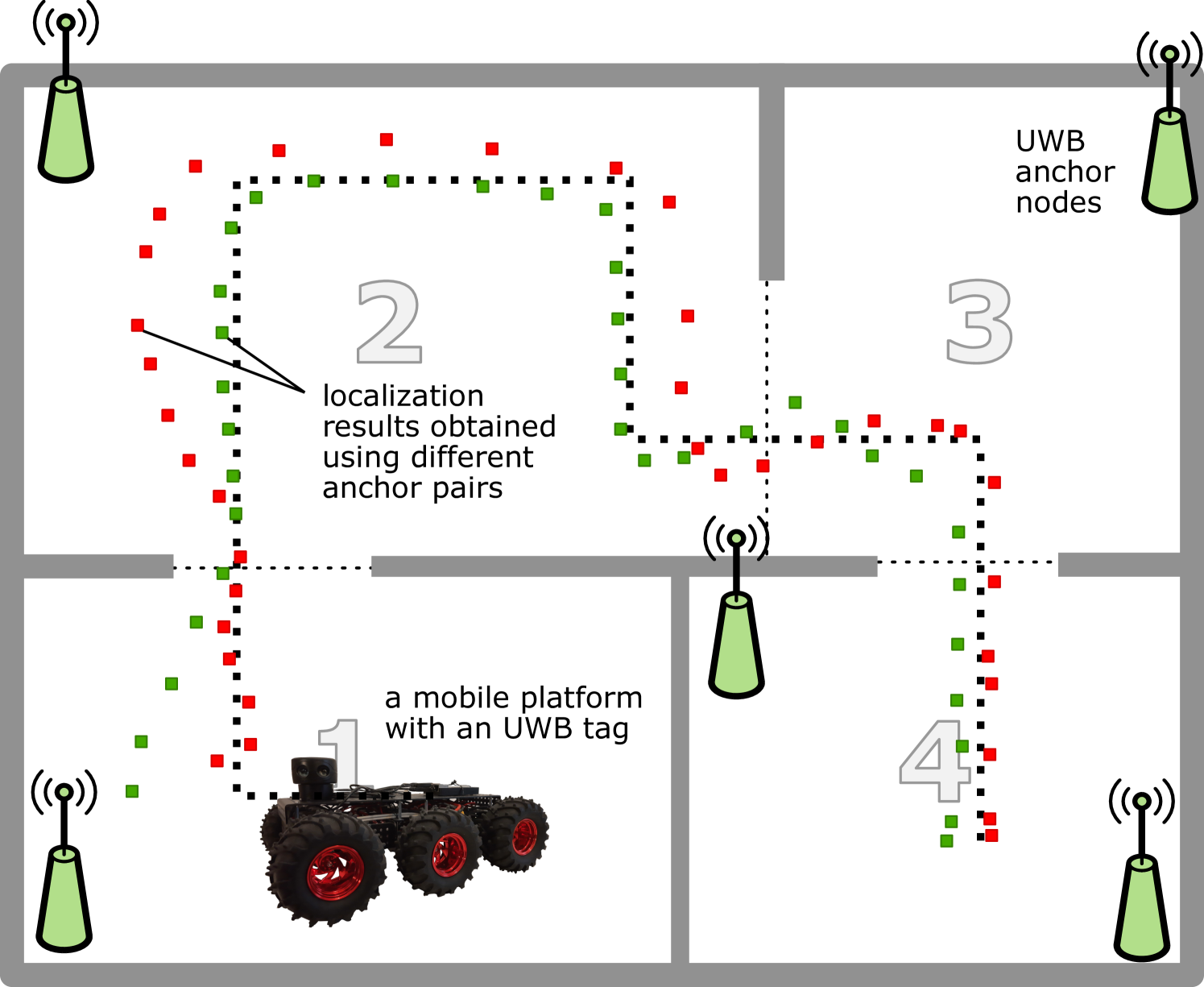
Indoor positioning systems based on Ultra-wideband (UWB) technology are gaining recognition for their ability to provide cm-level localization accuracy. However, these systems often encounter challenges caused by dense multi-path fading, leading to positioning errors. To address this issue, in this letter, we propose a novel methodology for unsupervised anchor node selection using deep embedded clustering (DEC). Our approach uses an Auto Encoder (AE) before clustering, thereby better separating UWB features into separable clusters of UWB input signals. We furthermore investigate how to rank these clusters based on their cluster quality, allowing us to remove untrustworthy signals. Experimental results show the efficiency of our proposed method, demonstrating a significant 23.1% reduction in mean absolute error (MAE) compared to without anchor exclusion. Especially in the dense multi-path area, our algorithm achieves even more significant enhancements, reducing the MAE by 26.6% and the 95th percentile error by 49.3% compared to without anchor exclusion.
Create account to get full access
Overview
- Examines error mitigation for time difference of arrival (TDoA) ultra-wideband (UWB) indoor localization using unsupervised machine learning
- Focuses on improving accuracy and robustness of TDoA-based UWB localization systems
- Proposes an approach to identify and mitigate various error sources using clustering algorithms
Plain English Explanation
Indoor localization is an important technology with applications in areas like smart homes, asset tracking, and navigation. One common approach is to use ultra-wideband (UWB) radio signals and time difference of arrival (TDoA) measurements to estimate the position of a target device. However, these TDoA-based UWB systems can suffer from various errors that reduce their accuracy.
This paper explores using unsupervised machine learning techniques to help identify and mitigate these error sources. The key idea is to leverage clustering algorithms to analyze the UWB measurement data and automatically detect patterns or anomalies that indicate different types of errors. By identifying these error factors, the system can then apply appropriate mitigation strategies to improve the overall localization performance.
The researchers collected real-world UWB measurement data in an indoor environment and used unsupervised learning methods like k-means clustering to analyze the data. They were able to identify several error sources, such as multipath effects and sensor biases, and develop mitigation techniques to address them. The end result was a more robust and accurate TDoA-based UWB localization system compared to traditional approaches.
Technical Explanation
The paper begins by discussing the challenges of TDoA-based UWB indoor localization, including sensitivity to environmental factors and hardware imperfections that can introduce various errors. To address these issues, the authors propose an unsupervised learning approach to automatically identify and mitigate different error sources.
The data collection and preprocessing stage involved setting up a UWB sensor network in an indoor environment and recording TDoA measurements between various anchor nodes and a target device. The researchers then applied k-means clustering and other unsupervised techniques to analyze the TDoA data and detect patterns corresponding to different error factors, such as multipath interference, sensor biases, and synchronization errors.
Based on the insights gained from the clustering analysis, the authors developed corresponding mitigation strategies. For example, they used acceleration measurements to improve the Kalman filter used for position estimation, and leveraged edge detection neural networks to better identify and handle multipath effects.
The effectiveness of the proposed error mitigation approach was evaluated through experiments and comparisons to traditional TDoA-based localization methods. The results demonstrated improved accuracy and robustness, particularly in challenging indoor environments.
Critical Analysis
The paper presents a promising approach to enhancing the reliability of TDoA-based UWB indoor localization systems, which is an important practical problem. The use of unsupervised learning to automatically identify and mitigate various error sources is a novel and compelling idea.
One potential limitation is the reliance on specific sensor configurations and indoor environments for the data collection and evaluation. The authors acknowledge that the effectiveness of the error mitigation strategies may vary depending on the deployment scenario and hardware setup. Further research is needed to understand the generalizability of the approach and how it would perform in a wider range of real-world settings.
Additionally, the paper does not provide a comprehensive analysis of the computational complexity and resource requirements of the proposed methods. This information would be useful for assessing the practical feasibility of implementing the error mitigation techniques, especially in resource-constrained IoT or edge computing applications.
Overall, the research presented in this paper represents a valuable contribution to the field of UWB indoor localization. The combination of unsupervised learning and targeted error mitigation strategies offers an interesting and potentially impactful solution to a challenging problem. Further development and validation of the approach could lead to significant improvements in the reliability and applicability of TDoA-based UWB systems.
Conclusion
This paper explores the use of unsupervised machine learning techniques to improve the accuracy and robustness of time difference of arrival (TDoA) ultra-wideband (UWB) indoor localization systems. By leveraging clustering algorithms to automatically identify and mitigate various error sources, such as multipath effects and sensor biases, the proposed approach demonstrates enhanced localization performance compared to traditional TDoA-based methods.
The research highlights the potential of unsupervised learning to address the practical challenges faced by TDoA-UWB indoor localization systems, which have important applications in areas like smart homes, asset tracking, and navigation. The findings from this work could lead to more reliable and accurate indoor positioning technologies, enabling new and improved services and applications that rely on precise location information.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Semi-Supervised Novelty Detection for Precise Ultra-Wideband Error Signal Prediction
Umberto Albertin, Alessandro Navone, Mauro Martini, Marcello Chiaberge
0
0
Ultra-Wideband (UWB) technology is an emerging low-cost solution for localization in a generic environment. However, UWB signal can be affected by signal reflections and non-line-of-sight (NLoS) conditions between anchors; hence, in a broader sense, the specific geometry of the environment and the disposition of obstructing elements in the map may drastically hinder the reliability of UWB for precise robot localization. This work aims to mitigate this problem by learning a map-specific characterization of the UWB quality signal with a fingerprint semi-supervised novelty detection methodology. An unsupervised autoencoder neural network is trained on nominal UWB map conditions, and then it is used to predict errors derived from the introduction of perturbing novelties in the environment. This work poses a step change in the understanding of UWB localization and its reliability in evolving environmental conditions. The resulting performance of the proposed method is proved by fine-grained experiments obtained with a visual tracking ground truth.
4/9/2024
Adaptive Anchor Pairs Selection in a TDOA-based System Through Robot Localization Error Minimization
Marcin Kolakowski
0
0
The following paper presents an adaptive anchor pairs selection method for ultra-wideband (UWB) Time Difference of Arrival (TDOA) based positioning systems. The method divides the area covered by the system into several zones and assigns them anchor pair sets. The pair sets are determined during calibration based on localization root mean square error (RMSE). The calibration assumes driving a mobile platform equipped with a LiDAR sensor and a UWB tag through the specified zones. The robot is localized separately based on a large set of different TDOA pairs and using a LiDAR, which acts as the reference. For each zone, the TDOA pairs set for which the registered RMSE is lowest is selected and used for localization in the routine system work. The proposed method has been tested with simulations and experiments. The results for both simulated static and experimental dynamic scenarios have proven that the adaptive selection of the anchor nodes leads to an increase in localization accuracy. In the experiment, the median trajectory error for a moving person localization was at a level of 25 cm.
4/9/2024
❗
Utilizing acceleration measurements to improve TDOA based localization
Marcin Kolakowski
0
0
In this paper localization using UWB positioning system and an inertial unit containing a single accelerometer is considered. The main part of the paper describes a novel algorithm for person localization. The algorithm is based on modified Extended Kalman Filter and utilizes TDOA (Time Difference of Arrival) results obtained from UWB system and results of acceleration measurement performed by the localized tag device. The proposed algorithm has been experimentally investigated through simulation and experiments. The results are included in the paper.
4/1/2024

Multi-Robot Collaborative Localization and Planning with Inter-Ranging
Derek Knowles, Adam Dai, Grace Gao
0
0
Robots often use feature-based image tracking to identify their position in their surrounding environment; however, feature-based image tracking is prone to errors in low-textured and poorly lit environments. Specifically, we investigate a scenario where robots are tasked with exploring the surface of the Moon and are required to have an accurate estimate of their position to be able to correctly geotag scientific measurements. To reduce localization error, we complement traditional feature-based image tracking with ultra-wideband (UWB) distance measurements between the robots. The robots use an advanced mesh-ranging protocol that allows them to continuously share distance measurements amongst each other rather than relying on the common anchor and tag UWB architecture. We develop a decentralized multi-robot coordination algorithm that actively plans paths based on measurement line-of-sight vectors amongst all robots to minimize collective localization error. We then demonstrate the emergent behavior of the proposed multi-robot coordination algorithm both in simulation and hardware to lower a geometry-based uncertainty metric and reduce localization error.
6/26/2024