MOTLEE: Collaborative Multi-Object Tracking Using Temporal Consistency for Neighboring Robot Frame Alignment

0
🎲
Sign in to get full access
Overview
- Accurately tracking nearby moving objects is crucial for mobile robots operating in dynamic environments
- Sharing observations of tracked objects among a team of robots can improve tracking performance
- But estimating the transformation between a robot's coordinate frame and its neighbors' frames is challenging due to odometry drift
- The paper presents "Multiple Object Tracking with Localization Error Elimination" (MOTLEE), a system that enables multi-robot teams to accurately estimate frame transformations and collaboratively track dynamic objects
Plain English Explanation
Robots navigating in busy, changing environments need to know where nearby moving things are, like people or other robots, to avoid collisions and operate safely. Sharing this information between robots on a team can improve how well they can track those moving objects. But it's hard for robots to figure out exactly how their coordinate systems line up with their teammates' coordinate systems, because small errors in measuring their own movements can add up over time.
The researchers developed a system called MOTLEE that solves this problem. First, the robots use advanced computer vision techniques to map the objects in their environments. They then have a way to align these maps between robots, even without knowing where the other robots are located. This lets them accurately estimate how their coordinate frames relate to each other. With that information, the team of robots can track moving objects collaboratively just as well as if they had perfect knowledge of their own and each other's positions.
Technical Explanation
The MOTLEE system has two main components. First, the robots use open-set image segmentation to build detailed maps of the objects in their environments. Then, they employ a Temporally Consistent Alignment of Frames Filter (TCAFF) to align these maps between robots and estimate the coordinate frame transformations, without any prior knowledge of the neighboring robot poses.
In experiments with four robots tracking six moving pedestrians, the MOTLEE system achieved tracking accuracy comparable to a system that had perfect knowledge of the robots' locations. This shows that the MOTLEE approach can effectively enable collaborative multi-robot object tracking in challenging real-world scenarios.
Critical Analysis
The paper provides a thorough explanation of the MOTLEE system and convincing experimental results. However, it does not address potential limitations or areas for future research in depth. For example, the system may struggle in scenarios with more complex or rapidly changing environments, or with a larger number of robots and tracked objects.
Additionally, the reliance on computer vision techniques like image segmentation means the system's performance could be affected by sensor limitations or environmental conditions that degrade visual information. Exploring ways to make the system more robust to these factors could be a valuable direction for future work.
Overall, the MOTLEE approach represents an impressive advance in multi-robot collaborative tracking, but there may be opportunities to further improve its capabilities and broaden its applicability in real-world settings.
Conclusion
The MOTLEE system enables a team of mobile robots to accurately track nearby moving objects, even without precisely knowing the locations of their teammates. By combining advanced mapping and frame alignment techniques, the robots can share observations and achieve collaborative tracking performance on par with a system with perfect localization knowledge.
This research represents an important step forward in enabling safe and effective robot navigation in dynamic environments. The ability for robots to work together to monitor their surroundings could have significant implications for applications like autonomous transportation, search and rescue operations, and surveillance. As the field of robotics continues to evolve, innovations like MOTLEE will be crucial for unlocking the full potential of multi-robot systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🎲
0
MOTLEE: Collaborative Multi-Object Tracking Using Temporal Consistency for Neighboring Robot Frame Alignment
Mason B. Peterson, Parker C. Lusk, Antonio Avila, Jonathan P. How
Knowing the locations of nearby moving objects is important for a mobile robot to operate safely in a dynamic environment. Dynamic object tracking performance can be improved if robots share observations of tracked objects with nearby team members in real-time. To share observations, a robot must make up-to-date estimates of the transformation from its coordinate frame to the frame of each neighbor, which can be challenging because of odometry drift. We present Multiple Object Tracking with Localization Error Elimination (MOTLEE), a complete system for a multi-robot team to accurately estimate frame transformations and collaboratively track dynamic objects. To accomplish this, robots use open-set image-segmentation methods to build object maps of their environment and then use our Temporally Consistent Alignment of Frames Filter (TCAFF) to align maps and estimate coordinate frame transformations without any initial knowledge of neighboring robot poses. We show that our method for aligning frames enables a team of four robots to collaboratively track six pedestrians with accuracy similar to that of a system with ground truth localization in a challenging hardware demonstration. The code and hardware dataset are available at https://github.com/mit-acl/motlee.
Read more5/9/2024
0
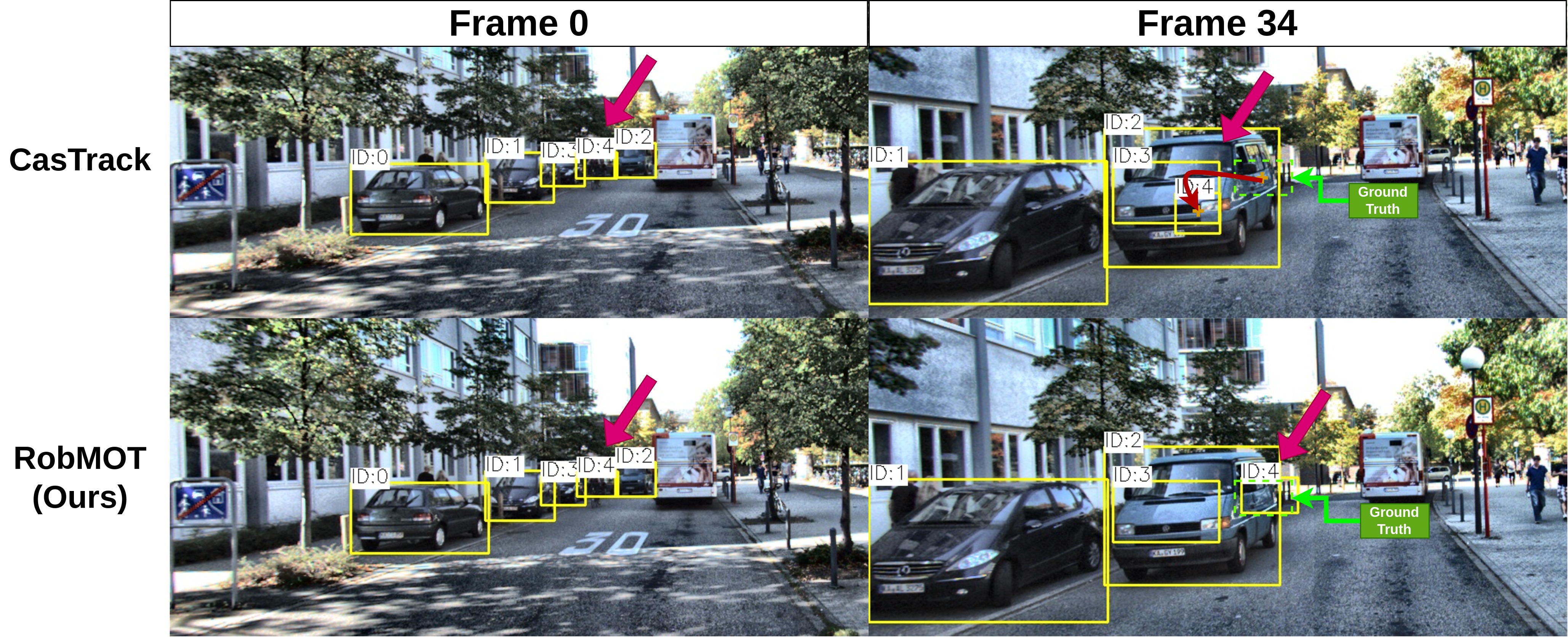
RobMOT: Robust 3D Multi-Object Tracking by Observational Noise and State Estimation Drift Mitigation on LiDAR PointCloud
Mohamed Nagy, Naoufel Werghi, Bilal Hassan, Jorge Dias, Majid Khonji
This work addresses limitations in recent 3D tracking-by-detection methods, focusing on identifying legitimate trajectories and addressing state estimation drift in Kalman filters. Current methods rely heavily on threshold-based filtering of false positive detections using detection scores to prevent ghost trajectories. However, this approach is inadequate for distant and partially occluded objects, where detection scores tend to drop, potentially leading to false positives exceeding the threshold. Additionally, the literature generally treats detections as precise localizations of objects. Our research reveals that noise in detections impacts localization information, causing trajectory drift for occluded objects and hindering recovery. To this end, we propose a novel online track validity mechanism that temporally distinguishes between legitimate and ghost tracks, along with a multi-stage observational gating process for incoming observations. This mechanism significantly improves tracking performance, with a $6.28%$ in HOTA and a $17.87%$ increase in MOTA. We also introduce a refinement to the Kalman filter that enhances noise mitigation in trajectory drift, leading to more robust state estimation for occluded objects. Our framework, RobMOT, outperforms state-of-the-art methods, including deep learning approaches, across various detectors, achieving up to a $4%$ margin in HOTA and $6%$ in MOTA. RobMOT excels under challenging conditions, such as prolonged occlusions and tracking distant objects, with up to a 59% improvement in processing latency.
Read more6/21/2024
0
STCMOT: Spatio-Temporal Cohesion Learning for UAV-Based Multiple Object Tracking
Jianbo Ma, Chuanming Tang, Fei Wu, Can Zhao, Jianlin Zhang, Zhiyong Xu
Multiple object tracking (MOT) in Unmanned Aerial Vehicle (UAV) videos is important for diverse applications in computer vision. Current MOT trackers rely on accurate object detection results and precise matching of target reidentification (ReID). These methods focus on optimizing target spatial attributes while overlooking temporal cues in modelling object relationships, especially for challenging tracking conditions such as object deformation and blurring, etc. To address the above-mentioned issues, we propose a novel Spatio-Temporal Cohesion Multiple Object Tracking framework (STCMOT), which utilizes historical embedding features to model the representation of ReID and detection features in a sequential order. Concretely, a temporal embedding boosting module is introduced to enhance the discriminability of individual embedding based on adjacent frame cooperation. While the trajectory embedding is then propagated by a temporal detection refinement module to mine salient target locations in the temporal field. Extensive experiments on the VisDrone2019 and UAVDT datasets demonstrate our STCMOT sets a new state-of-the-art performance in MOTA and IDF1 metrics. The source codes are released at https://github.com/ydhcg-BoBo/STCMOT.
Read more9/18/2024

0
ETTrack: Enhanced Temporal Motion Predictor for Multi-Object Tracking
Xudong Han, Nobuyuki Oishi, Yueying Tian, Elif Ucurum, Rupert Young, Chris Chatwin, Philip Birch
Many Multi-Object Tracking (MOT) approaches exploit motion information to associate all the detected objects across frames. However, many methods that rely on filtering-based algorithms, such as the Kalman Filter, often work well in linear motion scenarios but struggle to accurately predict the locations of objects undergoing complex and non-linear movements. To tackle these scenarios, we propose a motion-based MOT approach with an enhanced temporal motion predictor, ETTrack. Specifically, the motion predictor integrates a transformer model and a Temporal Convolutional Network (TCN) to capture short-term and long-term motion patterns, and it predicts the future motion of individual objects based on the historical motion information. Additionally, we propose a novel Momentum Correction Loss function that provides additional information regarding the motion direction of objects during training. This allows the motion predictor rapidly adapt to motion variations and more accurately predict future motion. Our experimental results demonstrate that ETTrack achieves a competitive performance compared with state-of-the-art trackers on DanceTrack and SportsMOT, scoring 56.4% and 74.4% in HOTA metrics, respectively.
Read more5/27/2024