Fast Generalizable Gaussian Splatting Reconstruction from Multi-View Stereo
2405.12218
0
0
Abstract
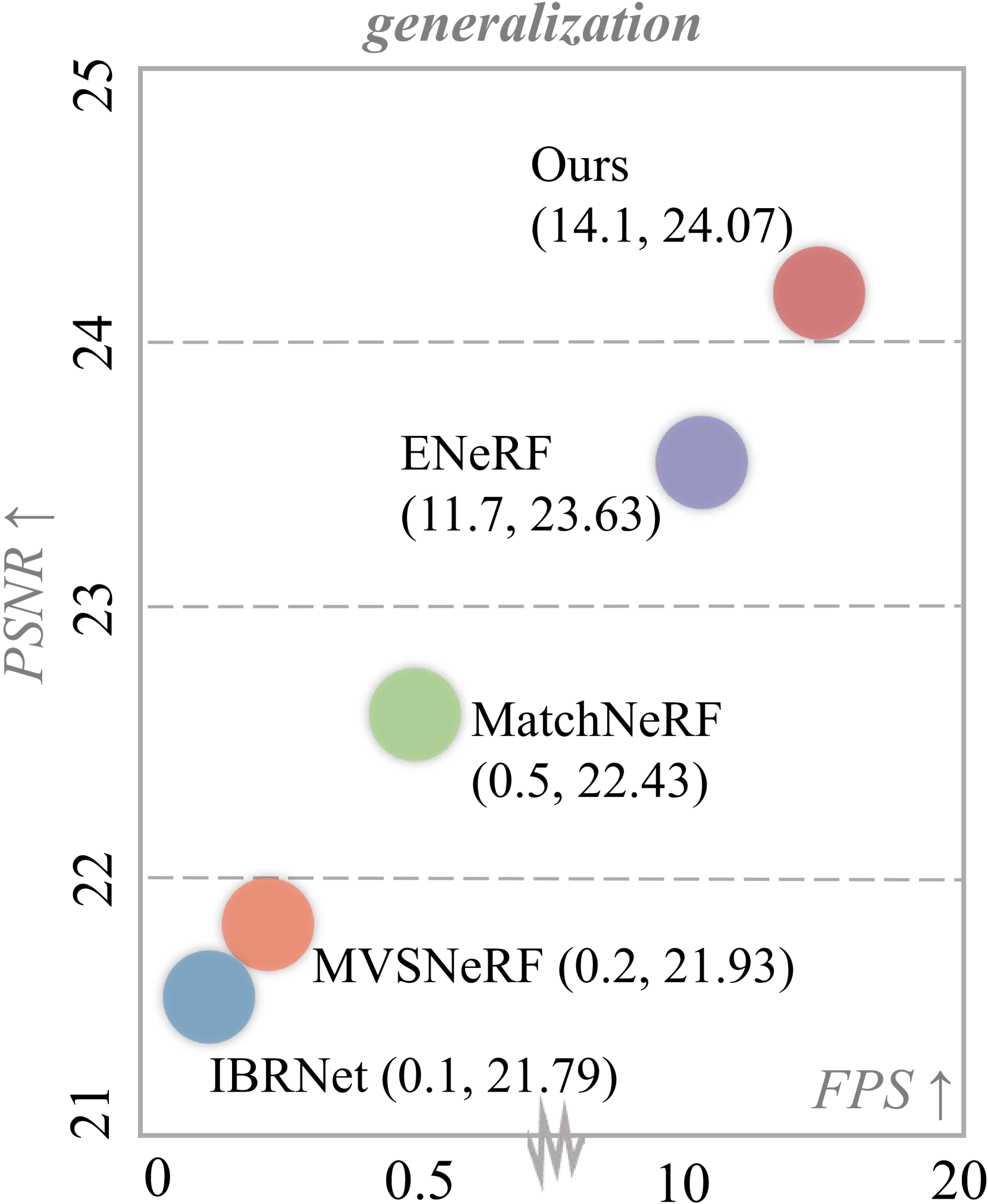
We present MVSGaussian, a new generalizable 3D Gaussian representation approach derived from Multi-View Stereo (MVS) that can efficiently reconstruct unseen scenes. Specifically, 1) we leverage MVS to encode geometry-aware Gaussian representations and decode them into Gaussian parameters. 2) To further enhance performance, we propose a hybrid Gaussian rendering that integrates an efficient volume rendering design for novel view synthesis. 3) To support fast fine-tuning for specific scenes, we introduce a multi-view geometric consistent aggregation strategy to effectively aggregate the point clouds generated by the generalizable model, serving as the initialization for per-scene optimization. Compared with previous generalizable NeRF-based methods, which typically require minutes of fine-tuning and seconds of rendering per image, MVSGaussian achieves real-time rendering with better synthesis quality for each scene. Compared with the vanilla 3D-GS, MVSGaussian achieves better view synthesis with less training computational cost. Extensive experiments on DTU, Real Forward-facing, NeRF Synthetic, and Tanks and Temples datasets validate that MVSGaussian attains state-of-the-art performance with convincing generalizability, real-time rendering speed, and fast per-scene optimization.
Create account to get full access
Overview
- This paper introduces a new method for fast and generalizable 3D reconstruction from multi-view stereo data using Gaussian splatting.
- The proposed approach, called GPS-Gaussian, is able to produce high-quality 3D geometry and texture reconstructions in real-time.
- The method builds on previous work on 3D Geometry-Aware Deformable Gaussian Splatting and Structure-Aware 3D Gaussian Splatting, further improving speed and generalization.
- The novel Surface Reconstruction from Gaussian Splatting via Novel View Synthesis approach enables high-quality novel view synthesis from the reconstructed 3D geometry.
Plain English Explanation
The paper presents a new method for quickly and accurately creating 3D models from multiple camera views. The key innovation is the use of Gaussian "splats" or shapes to represent the 3D geometry, rather than a dense set of 3D points. This Gaussian splatting approach allows the 3D reconstruction to be generated very efficiently, while still capturing fine details.
The method builds on previous work that used Gaussian splats for 3D reconstruction, but improves on the speed and ability to generalize to new scenes. By representing the 3D geometry with Gaussian shapes instead of individual points, the algorithm can produce high-quality 3D models in real-time, without requiring expensive computation.
Additionally, the paper introduces a new technique for generating novel views of the 3D scene from the reconstructed Gaussian splats. This enables the creation of smooth, high-quality 3D visualizations from the original multi-view data.
Overall, this work advances the state-of-the-art in efficient and generalizable 3D reconstruction from multi-view stereo data, with applications in areas like virtual/augmented reality, robotics, and 3D content creation.
Technical Explanation
The GPS-Gaussian approach represents 3D geometry using a set of Gaussian splats, where each splat corresponds to a pixel in the input images. This allows the 3D reconstruction to be computed efficiently in a single forward pass, without the need for expensive 3D optimization or refinement.
The method builds on previous work on 3D Geometry-Aware Deformable Gaussian Splatting and Structure-Aware 3D Gaussian Splatting, but introduces several key innovations to improve speed and generalization. These include a novel neural network architecture, a differentiable Gaussian splatting operation, and a multi-scale loss function.
The novel Surface Reconstruction from Gaussian Splatting via Novel View Synthesis approach then uses the reconstructed Gaussian splats to generate high-quality novel views of the 3D scene. This is achieved by learning to warp and composite the Gaussian splats in the target view, enabling smooth and detailed novel view synthesis.
The paper evaluates the GPS-Gaussian method on several multi-view stereo benchmarks, demonstrating state-of-the-art performance in terms of reconstruction quality and runtime. The authors also show the generalization capabilities of their approach by testing on diverse real-world scenes.
Critical Analysis
The paper presents a compelling approach for fast and generalizable 3D reconstruction from multi-view stereo data. The use of Gaussian splatting is a clever way to balance efficiency and reconstruction quality, and the novel view synthesis technique is a valuable addition.
One potential limitation is that the method may struggle with very complex or occluded scenes, as the Gaussian splats may not be able to fully capture the intricate 3D geometry. The authors acknowledge this and suggest exploring hierarchical or adaptive splat representations as future work.
Another area for improvement could be the incorporation of additional cues, such as semantic segmentation or instance-level information, to further enhance the 3D reconstructions. This could be particularly useful for applications like augmented reality or robotics, where semantic understanding of the 3D environment is crucial.
Overall, the GPS-Gaussian method represents a significant advance in efficient and generalizable 3D reconstruction, with promising applications in various domains. The critical analysis encourages readers to think carefully about the method's strengths, limitations, and potential for future development.
Conclusion
The paper introduces a novel approach for fast and generalizable 3D reconstruction from multi-view stereo data, called GPS-Gaussian. By representing the 3D geometry using Gaussian splats, the method is able to produce high-quality reconstructions in real-time, while also demonstrating strong generalization capabilities across diverse scenes.
The key contributions of this work include the efficient Gaussian splatting representation, the novel neural network architecture, and the surface reconstruction via novel view synthesis. These advances enable the GPS-Gaussian method to outperform state-of-the-art approaches in terms of both reconstruction quality and runtime performance.
The potential applications of this research are wide-ranging, from virtual/augmented reality and 3D content creation to robotics and autonomous systems. As the field of 3D reconstruction continues to evolve, the ideas presented in this paper could have a significant impact on the development of fast, accurate, and generalizable 3D modeling techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

FreeSplat: Generalizable 3D Gaussian Splatting Towards Free-View Synthesis of Indoor Scenes
Yunsong Wang, Tianxin Huang, Hanlin Chen, Gim Hee Lee
0
0
Empowering 3D Gaussian Splatting with generalization ability is appealing. However, existing generalizable 3D Gaussian Splatting methods are largely confined to narrow-range interpolation between stereo images due to their heavy backbones, thus lacking the ability to accurately localize 3D Gaussian and support free-view synthesis across wide view range. In this paper, we present a novel framework FreeSplat that is capable of reconstructing geometrically consistent 3D scenes from long sequence input towards free-view synthesis.Specifically, we firstly introduce Low-cost Cross-View Aggregation achieved by constructing adaptive cost volumes among nearby views and aggregating features using a multi-scale structure. Subsequently, we present the Pixel-wise Triplet Fusion to eliminate redundancy of 3D Gaussians in overlapping view regions and to aggregate features observed across multiple views. Additionally, we propose a simple but effective free-view training strategy that ensures robust view synthesis across broader view range regardless of the number of views. Our empirical results demonstrate state-of-the-art novel view synthesis peformances in both novel view rendered color maps quality and depth maps accuracy across different numbers of input views. We also show that FreeSplat performs inference more efficiently and can effectively reduce redundant Gaussians, offering the possibility of feed-forward large scene reconstruction without depth priors.
6/11/2024
WE-GS: An In-the-wild Efficient 3D Gaussian Representation for Unconstrained Photo Collections
Yuze Wang, Junyi Wang, Yue Qi
0
0
Novel View Synthesis (NVS) from unconstrained photo collections is challenging in computer graphics. Recently, 3D Gaussian Splatting (3DGS) has shown promise for photorealistic and real-time NVS of static scenes. Building on 3DGS, we propose an efficient point-based differentiable rendering framework for scene reconstruction from photo collections. Our key innovation is a residual-based spherical harmonic coefficients transfer module that adapts 3DGS to varying lighting conditions and photometric post-processing. This lightweight module can be pre-computed and ensures efficient gradient propagation from rendered images to 3D Gaussian attributes. Additionally, we observe that the appearance encoder and the transient mask predictor, the two most critical parts of NVS from unconstrained photo collections, can be mutually beneficial. We introduce a plug-and-play lightweight spatial attention module to simultaneously predict transient occluders and latent appearance representation for each image. After training and preprocessing, our method aligns with the standard 3DGS format and rendering pipeline, facilitating seamlessly integration into various 3DGS applications. Extensive experiments on diverse datasets show our approach outperforms existing approaches on the rendering quality of novel view and appearance synthesis with high converge and rendering speed.
6/5/2024
FSGS: Real-Time Few-shot View Synthesis using Gaussian Splatting
Zehao Zhu, Zhiwen Fan, Yifan Jiang, Zhangyang Wang
0
0
Novel view synthesis from limited observations remains an important and persistent task. However, high efficiency in existing NeRF-based few-shot view synthesis is often compromised to obtain an accurate 3D representation. To address this challenge, we propose a few-shot view synthesis framework based on 3D Gaussian Splatting that enables real-time and photo-realistic view synthesis with as few as three training views. The proposed method, dubbed FSGS, handles the extremely sparse initialized SfM points with a thoughtfully designed Gaussian Unpooling process. Our method iteratively distributes new Gaussians around the most representative locations, subsequently infilling local details in vacant areas. We also integrate a large-scale pre-trained monocular depth estimator within the Gaussians optimization process, leveraging online augmented views to guide the geometric optimization towards an optimal solution. Starting from sparse points observed from limited input viewpoints, our FSGS can accurately grow into unseen regions, comprehensively covering the scene and boosting the rendering quality of novel views. Overall, FSGS achieves state-of-the-art performance in both accuracy and rendering efficiency across diverse datasets, including LLFF, Mip-NeRF360, and Blender. Project website: https://zehaozhu.github.io/FSGS/.
6/18/2024

Superpoint Gaussian Splatting for Real-Time High-Fidelity Dynamic Scene Reconstruction
Diwen Wan, Ruijie Lu, Gang Zeng
0
0
Rendering novel view images in dynamic scenes is a crucial yet challenging task. Current methods mainly utilize NeRF-based methods to represent the static scene and an additional time-variant MLP to model scene deformations, resulting in relatively low rendering quality as well as slow inference speed. To tackle these challenges, we propose a novel framework named Superpoint Gaussian Splatting (SP-GS). Specifically, our framework first employs explicit 3D Gaussians to reconstruct the scene and then clusters Gaussians with similar properties (e.g., rotation, translation, and location) into superpoints. Empowered by these superpoints, our method manages to extend 3D Gaussian splatting to dynamic scenes with only a slight increase in computational expense. Apart from achieving state-of-the-art visual quality and real-time rendering under high resolutions, the superpoint representation provides a stronger manipulation capability. Extensive experiments demonstrate the practicality and effectiveness of our approach on both synthetic and real-world datasets. Please see our project page at https://dnvtmf.github.io/SP_GS.github.io.
6/7/2024