Tightly Joined Positioning and Control Model for Unmanned Aerial Vehicles Based on Factor Graph Optimization

0
📈
Sign in to get full access
Overview
- Unmanned aerial vehicles (UAVs) rely on navigation to execute flight missions
- Traditional navigation pipelines separate positioning and control, which can struggle to adapt to uncertainties
- This research proposes a tightly joined positioning and control model (JPCM) based on factor graph optimization (FGO) to address these challenges
Plain English Explanation
Unmanned aerial vehicles, or drones, need to be able to navigate and control their flight path to complete their missions. Traditionally, the navigation system has been divided into two separate parts: one for figuring out the drone's position, and one for controlling the drone's movements to follow the desired path.
However, this traditional approach can have trouble dealing with all the different uncertainties that can come up during a flight, such as measurement errors, sudden changes in the environment, and the complex dynamics of the drone itself. For example, in a crowded urban area, the GPS signal used to track the drone's position can bounce off tall buildings, making it harder to know exactly where the drone is. And the unpredictable wind currents in urban canyons can make it challenging for the control system to keep the drone on the right path.
To address these challenges, the researchers in this study propose a new "tightly joined positioning and control model" (JPCM). This model combines the information from the positioning sensors and the control system into a single, unified mathematical framework called a factor graph. By solving this factor graph, the system can take advantage of the complementary strengths of the positioning and control components, leading to more reliable and resilient navigation performance.
The researchers test this JPCM approach using a simulated quadrotor drone system, and show that it can significantly improve the drone's ability to accurately follow a planned trajectory, even in the face of various uncertainties.
Technical Explanation
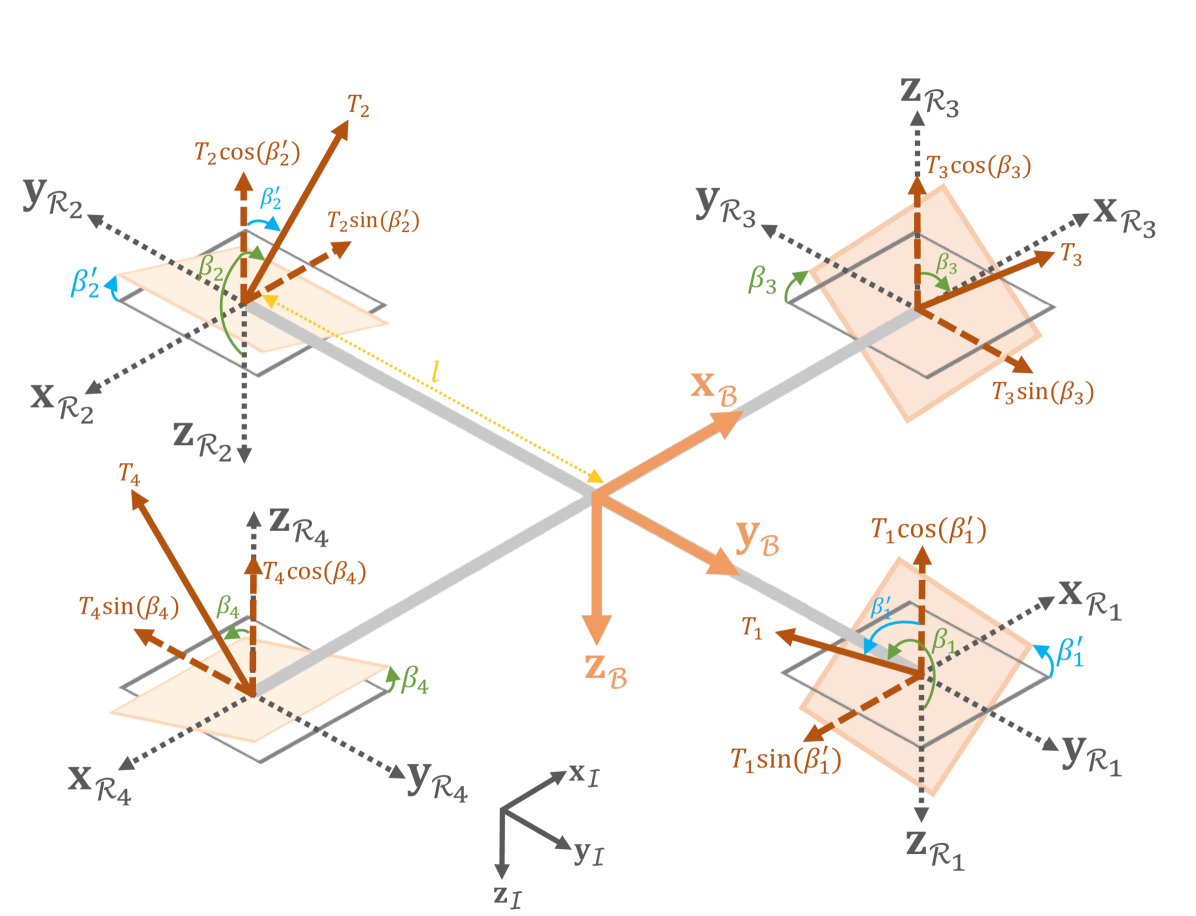
The proposed tightly joined positioning and control model (JPCM) is based on factor graph optimization (FGO). In this approach, the positioning measurements from sensors are formulated as factors in the factor graph, and the model predictive control (MPC) is also represented as additional factors.
By solving the factor graph that includes both the positioning-related factors and the MPC-based factors, the JPCM is able to deeply exploit the complementary strengths of the positioning and control components. This tight coupling allows the system to better adapt to the ubiquitous uncertainties, such as measurement noise, abrupt disturbances, and nonlinear dynamics, that can degrade the navigation performance of traditional decoupled approaches.
The effectiveness and resilience of the proposed JPCM method is validated using a simulated quadrotor system. The results show that the JPCM can significantly improve the trajectory following performance compared to traditional approaches, even in complex dynamic environments like urban areas. This improvement is achieved by the JPCM's ability to jointly optimize the positioning and control, as opposed to the sequential and decoupled nature of traditional navigation pipelines.
Critical Analysis
The paper provides a compelling approach to improving the navigation reliability of UAVs by tightly coupling the positioning and control components. The JPCM framework based on factor graph optimization is a promising solution to address the challenges posed by ubiquitous uncertainties in real-world flight environments.
However, the paper does not provide much detail on the specific factor graph formulation and the underlying optimization process. Additionally, the validation is limited to a simulated quadrotor system, and it would be valuable to see how the JPCM performs on real-world UAV platforms and in more diverse environmental conditions.
It would also be interesting to explore the computational complexity and runtime performance of the JPCM, as real-time implementation on embedded systems is a key requirement for practical UAV applications. Closed-loop model identification for MPC-based navigation and radial basis function neural networks for formation control are related approaches that could provide useful insights for further developing and optimizing the JPCM.
Additionally, the paper does not discuss the potential limitations or failure modes of the JPCM, such as how it might handle sensor failures or extreme environmental conditions. Supply-sustainable multi-UAV performance-aware placement is an example of research that considers such practical deployment challenges for UAV systems.
Overall, the JPCM is a promising step towards more robust and reliable UAV navigation, but further research and real-world validation would be necessary to fully understand its capabilities and limitations.
Conclusion
This research proposes a tightly joined positioning and control model (JPCM) based on factor graph optimization to address the navigation challenges faced by unmanned aerial vehicles (UAVs) in complex, dynamic environments. The JPCM integrates positioning measurements and model predictive control into a unified probabilistic framework, allowing it to better adapt to uncertainties and improve trajectory following performance.
The simulation results demonstrate the effectiveness of the JPCM approach, suggesting that the tight coupling of positioning and control can lead to significant improvements in UAV navigation reliability. This research represents an important step towards more robust and resilient UAV navigation systems, which will be crucial for the widespread adoption and safe operation of these technologies in real-world applications, such as aerial surveying, package delivery, and search and rescue operations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
Tightly Joined Positioning and Control Model for Unmanned Aerial Vehicles Based on Factor Graph Optimization
Peiwen Yang, Weisong Wen, Shiyu Bai, Li-Ta Hsu
The execution of flight missions by unmanned aerial vehicles (UAV) primarily relies on navigation. In particular, the navigation pipeline has traditionally been divided into positioning and control, operating in a sequential loop. However, the existing navigation pipeline, where the positioning and control are decoupled, struggles to adapt to ubiquitous uncertainties arising from measurement noise, abrupt disturbances, and nonlinear dynamics. As a result, the navigation reliability of the UAV is significantly challenged in complex dynamic areas. For example, the ubiquitous global navigation satellite system (GNSS) positioning can be degraded by the signal reflections from surrounding high-rising buildings in complex urban areas, leading to significantly increased positioning uncertainty. An additional challenge is introduced to the control algorithm due to the complex wind disturbances in urban canyons. Given the fact that the system positioning and control are highly correlated with each other, this research proposes a **tightly joined positioning and control model (JPCM) based on factor graph optimization (FGO)**. In particular, the proposed JPCM combines sensor measurements from positioning and control constraints into a unified probabilistic factor graph. Specifically, the positioning measurements are formulated as the factors in the factor graph. In addition, the model predictive control (MPC) is also formulated as the additional factors in the factor graph. By solving the factor graph contributed by both the positioning-related factors and the MPC-based factors, the complementariness of positioning and control can be deeply exploited. Finally, we validate the effectiveness and resilience of the proposed method using a simulated quadrotor system which shows significantly improved trajectory following performance.
Read more4/24/2024

0
Model Predictive Path Integral Control for Agile Unmanned Aerial Vehicles
Michal Minarik, Robert Penicka, Vojtech Vonasek, Martin Saska
This paper introduces a control architecture for real-time and onboard control of Unmanned Aerial Vehicles (UAVs) in environments with obstacles using the Model Predictive Path Integral (MPPI) methodology. MPPI allows the use of the full nonlinear model of UAV dynamics and a more general cost function at the cost of a high computational demand. To run the controller in real-time, the sampling-based optimization is performed in parallel on a graphics processing unit onboard the UAV. We propose an approach to the simulation of the nonlinear system which respects low-level constraints, while also able to dynamically handle obstacle avoidance, and prove that our methods are able to run in real-time without the need for external computers. The MPPI controller is compared to MPC and SE(3) controllers on the reference tracking task, showing a comparable performance. We demonstrate the viability of the proposed method in multiple simulation and real-world experiments, tracking a reference at up to 44 km/h and acceleration close to 20 m/s^2, while still being able to avoid obstacles. To the best of our knowledge, this is the first method to demonstrate an MPPI-based approach in real flight.
Read more7/16/2024
0
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
Read more6/26/2024
0
Model-Predictive Trajectory Generation for Autonomous Aerial Search and Coverage
Hugo Matias, Daniel Silvestre
This paper addresses the trajectory planning problem for search and coverage missions with an Unmanned Aerial Vehicle (UAV). The objective is to devise optimal coverage trajectories based on a utility map describing prior region information, assumed to be effectively approximated by a Gaussian Mixture Model (GMM). We introduce a Model Predictive Control (MPC) algorithm employing a relaxed formulation that promotes the exploration of the map by preventing the UAV from revisiting previously covered areas. This is achieved by penalizing intersections between the UAV's visibility regions along its trajectory. The algorithm is assessed in MATLAB and validated in Gazebo, as well as in outdoor experimental tests. The results show that the proposed strategy can generate efficient and smooth trajectories for search and coverage missions.
Read more4/8/2024