Graph-Based vs. Error State Kalman Filter-Based Fusion Of 5G And Inertial Data For MAV Indoor Pose Estimation

0

Sign in to get full access
Overview
- This paper explores two approaches for fusing 5G and inertial data to estimate the indoor pose (position and orientation) of a Micro Aerial Vehicle (MAV): a graph-based method and an error state Kalman filter-based method.
- The researchers conducted experiments to compare the performance of these two fusion techniques in terms of accuracy, robustness, and computational efficiency.
- The findings suggest that the error state Kalman filter-based approach outperformed the graph-based method in most scenarios, particularly in terms of accuracy and computational cost.
Plain English Explanation
In this paper, the researchers investigated two different ways to combine information from 5G wireless signals and inertial sensors (like accelerometers and gyroscopes) to estimate the position and orientation of a small flying robot, called a Micro Aerial Vehicle (MAV), while it is moving indoors.
The first approach they tested is called a "graph-based" method. This involves creating a complex web of interconnected measurements and estimates, kind of like a spider's web, to try to figure out the MAV's location and orientation. The second approach they tried is an "error state Kalman filter," which is a mathematical tool that keeps track of how uncertain the MAV's position and orientation estimates are, and uses that information to make better guesses over time.
Through their experiments, the researchers found that the error state Kalman filter-based approach generally worked better than the graph-based method. It was able to estimate the MAV's pose (position and orientation) more accurately and did so more efficiently, using less computing power. This suggests the error state Kalman filter may be a better choice for real-world applications where you need to track a flying robot's location indoors using a combination of 5G signals and motion sensors.
Technical Explanation
The researchers evaluated two different techniques for fusing 5G wireless data and inertial measurements to estimate the indoor pose (position and orientation) of a Micro Aerial Vehicle (MAV):
-
Graph-Based Fusion: This approach represents the different sensor measurements and state estimates as a complex network of interconnected nodes and edges, forming a graph. The goal is to find the optimal set of estimates that best fit all the available measurements.
-
Error State Kalman Filter-Based Fusion: This method uses an error state Kalman filter to recursively update the MAV's pose estimate based on the 5G and inertial data. The Kalman filter explicitly models the uncertainty in the measurements and state estimates to improve the overall estimation accuracy.
The researchers conducted experiments in a realistic indoor environment, where the MAV was equipped with 5G radios and an inertial measurement unit (IMU). They compared the performance of the two fusion approaches in terms of pose estimation accuracy, robustness to sensor failures, and computational efficiency.
The results showed that the error state Kalman filter-based fusion outperformed the graph-based approach in most scenarios, particularly in terms of accuracy and computational cost. The Kalman filter-based method was able to better handle sensor uncertainties and efficiently fuse the 5G and inertial data to provide more reliable pose estimates for the MAV.
Critical Analysis
The paper provides a thorough evaluation of the two fusion techniques and offers valuable insights for practitioners working on indoor localization and navigation for Micro Aerial Vehicles. However, a few potential limitations and areas for further research are worth noting:
-
The experiments were conducted in a single indoor environment, which may limit the generalizability of the findings. Testing the methods in more diverse indoor settings could help validate the robustness of the approaches.
-
The paper does not explore the impact of different sensor modalities, such as visual or ultrasonic sensors, on the fusion performance. Incorporating additional sensing capabilities could further improve the overall pose estimation accuracy.
-
The computational efficiency analysis focuses on runtime, but does not consider the memory footprint or power consumption of the two fusion methods. These factors may be crucial for deploying the system on resource-constrained MAV platforms.
-
The paper does not provide a detailed sensitivity analysis of the fusion methods to different parameter settings or sensor noise characteristics. Understanding the impact of these factors could help guide the practical deployment of the system.
Conclusion
This research paper presents a comparative study of graph-based and error state Kalman filter-based techniques for fusing 5G and inertial data to estimate the indoor pose of a Micro Aerial Vehicle. The findings suggest that the error state Kalman filter-based approach outperforms the graph-based method in terms of accuracy, robustness, and computational efficiency.
These results have important implications for the development of reliable indoor navigation systems for small flying robots, which could find applications in areas such as search and rescue operations, infrastructure inspection, and delivery services. The insights gained from this work can help guide the design of future multi-sensor fusion algorithms for MAV pose estimation in complex indoor environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Graph-Based vs. Error State Kalman Filter-Based Fusion Of 5G And Inertial Data For MAV Indoor Pose Estimation
Meisam Kabiri, Claudio Cimarelli, Hriday Bavle, Jose Luis Sanchez-Lopez, Holger Voos
5G New Radio Time of Arrival (ToA) data has the potential to revolutionize indoor localization for micro aerial vehicles (MAVs). However, its performance under varying network setups, especially when combined with IMU data for real-time localization, has not been fully explored so far. In this study, we develop an error state Kalman filter (ESKF) and a pose graph optimization (PGO) approach to address this gap. We systematically evaluate the performance of the derived approaches for real-time MAV localization in realistic scenarios with 5G base stations in Line-Of-Sight (LOS), demonstrating the potential of 5G technologies in this domain. In order to experimentally test and compare our localization approaches, we augment the EuRoC MAV benchmark dataset for visual-inertial odometry with simulated yet highly realistic 5G ToA measurements. Our experimental results comprehensively assess the impact of varying network setups, including varying base station numbers and network configurations, on ToA-based MAV localization performance. The findings show promising results for seamless and robust localization using 5G ToA measurements, achieving an accuracy of 15 cm throughout the entire trajectory within a graph-based framework with five 5G base stations, and an accuracy of up to 34 cm in the case of ESKF-based localization. Additionally, we measure the run time of both algorithms and show that they are both fast enough for real-time implementation.
Read more5/3/2024
🛸
0
Recursive Distributed Collaborative Aided Inertial Navigation
Roland Jung
In this dissertation, we investigate the issue of robust localization in swarms of heterogeneous mobile agents with multiple and time-varying sensing modalities. Our focus is the development of filter-based and decoupled estimators under the assumption that agents possess communication and processing capabilities. Based on the findings from Distributed Collaborative State Estimation and modular sensor fusion, we propose a novel Kalman filter decoupling paradigm, which is termed Isolated Kalman Filtering (IKF). This paradigm is formally discussed and the treatment of delayed measurement is studied. The impact of approximation made was investigated on different observation graphs and the filter credibility was evaluated on a linear system in a Monte Carlo simulation. Finally, we propose a multi-agent modular sensor fusion approach based on the IKF paradigm, in order to cooperatively estimate the global state of a multi-agent system in a distributed way and fuse information provided by different on-board sensors in a computationally efficient way. As a consequence, this approach can be performed distributed among agents, while (i) communication between agents is only required at the moment of inter-agent joint observations, (ii) one agent acts as interim master to process state corrections isolated, (iii) agents can be added and removed from the swarm, (iv) each agent's full state can vary during mission (each local sensor suite can be truly modular), and (v) delayed and multi-rate sensor updates are supported. Extensive evaluation on realistic simulated and real-world data sets show that the proposed Isolated Kalman Filtering (IKF) paradigm, is applicable for both, truly modular single agent estimation and distributed collaborative multi-agent estimation problems.
Read more8/23/2024
🛠️
0
GNSS/Multi-Sensor Fusion Using Continuous-Time Factor Graph Optimization for Robust Localization
Haoming Zhang, Chih-Chun Chen, Heike Vallery, Timothy D. Barfoot
Accurate and robust vehicle localization in highly urbanized areas is challenging. Sensors are often corrupted in those complicated and large-scale environments. This paper introduces GNSS-FGO, an online and global trajectory estimator that fuses GNSS observations alongside multiple sensor measurements for robust vehicle localization. In GNSS-FGO, we fuse asynchronous sensor measurements into the graph with a continuous-time trajectory representation using Gaussian process regression. This enables querying states at arbitrary timestamps so that sensor observations are fused without requiring strict state and measurement synchronization. Thus, the proposed method presents a generalized factor graph for multi-sensor fusion. To evaluate and study different GNSS fusion strategies, we fuse GNSS measurements in loose and tight coupling with a speed sensor, IMU, and lidar-odometry. We employed datasets from measurement campaigns in Aachen, Duesseldorf, and Cologne in experimental studies and presented comprehensive discussions on sensor observations, smoother types, and hyperparameter tuning. Our results show that the proposed approach enables robust trajectory estimation in dense urban areas, where the classic multi-sensor fusion method fails due to sensor degradation. In a test sequence containing a 17km route through Aachen, the proposed method results in a mean 2D positioning error of 0.48m while fusing raw GNSS observations with lidar odometry in a tight coupling.
Read more8/2/2024
0
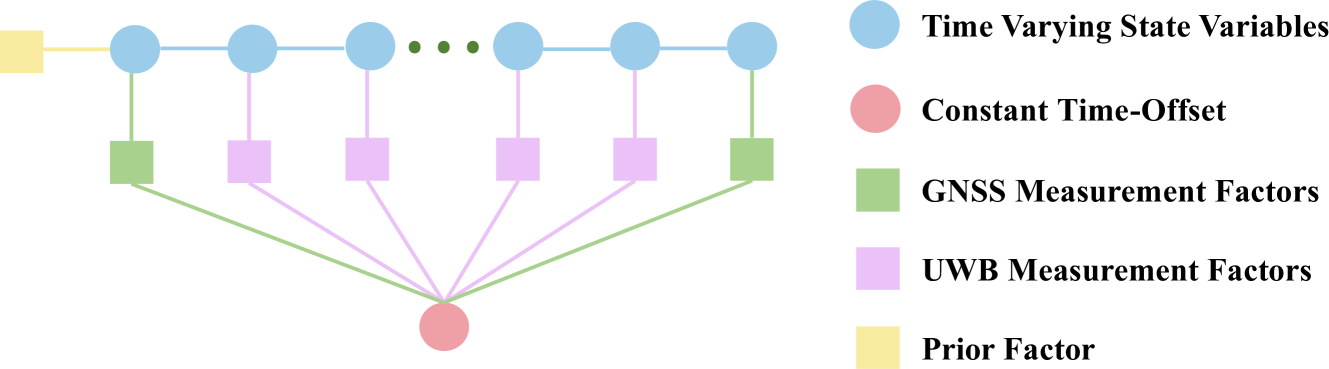
FE-GUT: Factor Graph Optimization hybrid with Extended Kalman Filter for tightly coupled GNSS/UWB Integration
Qijia Zhao, Shaolin Lu, Jianan Lou, Rong Zhang
Precise positioning and navigation information has been increasingly important with the development of the consumer electronics market. Due to some deficits of Global Navigation Satellite System (GNSS), such as susceptible to interferences, integrating of GNSS with additional alternative sensors is a promising approach to overcome the performance limitations of GNSS-based localization systems. Ultra-Wideband (UWB) can be used to enhance GNSS in constructing an integrated localization system. However, most low-cost UWB devices lack a hardware-level time synchronization feature, which necessitates the estimation and compensation of the time-offset in the tightly coupled GNSS/UWB integration. Given the flexibility of probabilistic graphical models, the time-offset can be modeled as an invariant constant in the discretization of the continuous model. This work proposes a novel architecture in which Factor Graph Optimization (FGO) is hybrid with Extend Kalman Filter (EKF) for tightly coupled GNSS/UWB integration with online Temporal calibration (FE-GUT). FGO is utilized to precisely estimate the time-offset, while EKF provides initailization for the new factors and performs time-offset compensation. Simulation-based experiments validate the integrated localization performance of FE-GUT. In a four-wheeled robot scenario, the results demonstrate that, compared to EKF, FE-GUT can improve horizontal and vertical localization accuracy by 58.59% and 34.80%, respectively, while the time-offset estimation accuracy is improved by 76.80%. All the source codes and datasets can be gotten via https://github.com/zhaoqj23/FE-GUT/.
Read more7/10/2024