Generating Synthetic Ground Truth Distributions for Multi-step Trajectory Prediction using Probabilistic Composite B'ezier Curves

0
Sign in to get full access
Overview
- This paper proposes a method for generating synthetic ground truth distributions for multi-step trajectory prediction using probabilistic composite Bézier curves.
- The approach aims to create realistic and diverse synthetic data to train and evaluate trajectory prediction models.
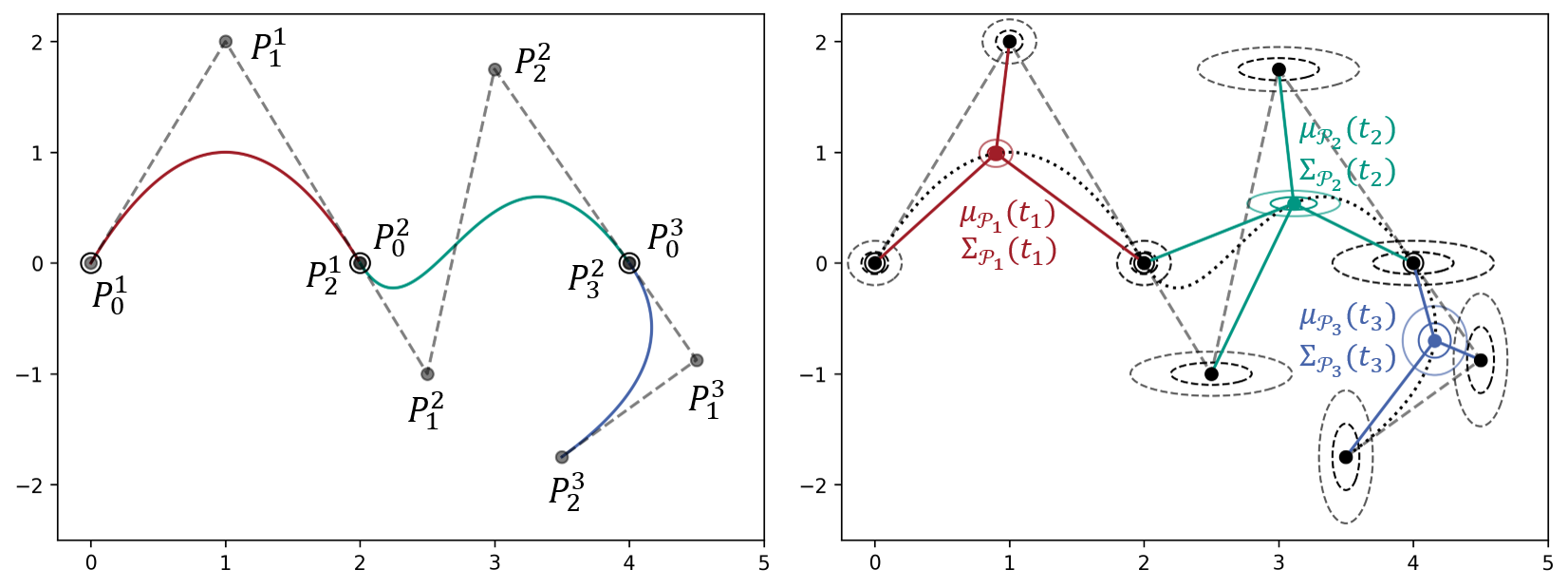
- The key idea is to model trajectories as probabilistic composite Bézier curves, which can capture the inherent uncertainty and variability in real-world trajectories.
Plain English Explanation
The paper addresses the challenge of generating realistic and diverse synthetic data for training and evaluating multi-step trajectory prediction models. Trajectory prediction is an important task in applications like autonomous vehicles, robotics, and sports analytics, where accurately forecasting the future positions of moving objects is crucial.
However, collecting large, diverse datasets of real-world trajectories can be difficult and time-consuming. To overcome this, the researchers propose a method to generate synthetic ground truth trajectory distributions using probabilistic composite Bézier curves. Bézier curves are a type of parametric curve that can be used to model complex, smooth trajectories.
The key innovation is to model trajectories as probabilistic composite Bézier curves, which can capture the inherent uncertainty and variability in real-world trajectories. By sampling from these probabilistic curves, the researchers can generate diverse synthetic trajectories that resemble real-world data. This synthetic data can then be used to train and evaluate trajectory prediction models, such as those used for autonomous aerial search or pedestrian trajectory prediction.
The ability to generate realistic synthetic data is valuable because it can help address the challenges of limited real-world data availability and diversity, which are common in many trajectory prediction applications.
Technical Explanation
The paper presents a method for generating synthetic ground truth trajectory distributions using probabilistic composite Bézier curves. The key steps are as follows:
-
Bézier Curve Parameterization: The researchers model each trajectory as a composite Bézier curve, where the curve is defined by a set of control points. These control points are sampled from a probabilistic distribution to capture the inherent uncertainty in real-world trajectories.
-
Probabilistic Composite Bézier Curves: The researchers then combine multiple Bézier curves into a probabilistic composite Bézier curve, which represents a distribution of possible trajectories. This allows the synthetic data to capture the multi-modal and stochastic nature of real-world trajectory data.
-
Synthetic Dataset Generation: By sampling from the probabilistic composite Bézier curves, the researchers can generate diverse synthetic trajectory datasets. These datasets can then be used to train and evaluate trajectory prediction models, as demonstrated in related work on learning collective variables for data augmentation.
The experimental results show that the proposed approach can generate realistic and diverse synthetic trajectory datasets that closely resemble real-world data. The authors also demonstrate how these synthetic datasets can be used to train and evaluate trajectory prediction models, including methods that leverage differentiable optimization for uneven terrains.
Critical Analysis
The paper presents a promising approach for generating synthetic ground truth trajectory distributions, but it also acknowledges several limitations and areas for future research:
- The method assumes that trajectories can be accurately modeled as composite Bézier curves, which may not always be the case, especially for more complex, irregular trajectories.
- The probabilistic modeling of the control points may not fully capture all the nuances and correlations present in real-world trajectory data.
- The paper only evaluates the approach on a single dataset and does not explore the generalization of the method to other domains or applications.
Additionally, while the paper demonstrates the utility of the synthetic data for training and evaluating trajectory prediction models, it does not provide a comprehensive analysis of the performance of these models on real-world data. Further research is needed to understand the limitations and potential biases introduced by the synthetic data generation process.
Conclusion
This paper presents a novel approach for generating synthetic ground truth distributions for multi-step trajectory prediction using probabilistic composite Bézier curves. The key idea is to model trajectories as probabilistic composite Bézier curves, which can capture the inherent uncertainty and variability in real-world trajectories.
The proposed method enables the creation of diverse synthetic trajectory datasets that can be used to train and evaluate trajectory prediction models. This is particularly valuable in applications where real-world trajectory data is limited or difficult to obtain, such as in autonomous vehicle development, robotics, and sports analytics.
While the paper acknowledges several limitations and areas for future research, the findings demonstrate the potential of this approach to advance the state of the art in trajectory prediction and contribute to the development of more robust and reliable systems in a variety of domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Generating Synthetic Ground Truth Distributions for Multi-step Trajectory Prediction using Probabilistic Composite B'ezier Curves
Ronny Hug, Stefan Becker, Wolfgang Hubner, Michael Arens
An appropriate data basis grants one of the most important aspects for training and evaluating probabilistic trajectory prediction models based on neural networks. In this regard, a common shortcoming of current benchmark datasets is their limitation to sets of sample trajectories and a lack of actual ground truth distributions, which prevents the use of more expressive error metrics, such as the Wasserstein distance for model evaluation. Towards this end, this paper proposes a novel approach to synthetic dataset generation based on composite probabilistic B'ezier curves, which is capable of generating ground truth data in terms of probability distributions over full trajectories. This allows the calculation of arbitrary posterior distributions. The paper showcases an exemplary trajectory prediction model evaluation using generated ground truth distribution data.
Read more4/9/2024

0
Pre-training on Synthetic Driving Data for Trajectory Prediction
Yiheng Li, Seth Z. Zhao, Chenfeng Xu, Chen Tang, Chenran Li, Mingyu Ding, Masayoshi Tomizuka, Wei Zhan
Accumulating substantial volumes of real-world driving data proves pivotal in the realm of trajectory forecasting for autonomous driving. Given the heavy reliance of current trajectory forecasting models on data-driven methodologies, we aim to tackle the challenge of learning general trajectory forecasting representations under limited data availability. We propose a pipeline-level solution to mitigate the issue of data scarcity in trajectory forecasting. The solution is composed of two parts: firstly, we adopt HD map augmentation and trajectory synthesis for generating driving data, and then we learn representations by pre-training on them. Specifically, we apply vector transformations to reshape the maps, and then employ a rule-based model to generate trajectories on both original and augmented scenes; thus enlarging the driving data without collecting additional real ones. To foster the learning of general representations within this augmented dataset, we comprehensively explore the different pre-training strategies, including extending the concept of a Masked AutoEncoder (MAE) for trajectory forecasting. Without bells and whistles, our proposed pipeline-level solution is general, simple, yet effective: we conduct extensive experiments to demonstrate the effectiveness of our data expansion and pre-training strategies, which outperform the baseline prediction model by large margins, e.g. 5.04%, 3.84% and 8.30% in terms of $MR_6$, $minADE_6$ and $minFDE_6$. The pre-training dataset and the codes for pre-training and fine-tuning are released at https://github.com/yhli123/Pretraining_on_Synthetic_Driving_Data_for_Trajectory_Prediction.
Read more8/30/2024

0
Efficient Trajectory Inference in Wasserstein Space Using Consecutive Averaging
Amartya Banerjee, Harlin Lee, Nir Sharon, Caroline Moosmuller
Capturing data from dynamic processes through cross-sectional measurements is seen in many fields such as computational biology. Trajectory inference deals with the challenge of reconstructing continuous processes from such observations. In this work, we propose methods for B-spline approximation and interpolation of point clouds through consecutive averaging that is instrinsic to the Wasserstein space. Combining subdivision schemes with optimal transport-based geodesic, our methods carry out trajectory inference at a chosen level of precision and smoothness, and can automatically handle scenarios where particles undergo division over time. We rigorously evaluate our method by providing convergence guarantees and testing it on simulated cell data characterized by bifurcations and merges, comparing its performance against state-of-the-art trajectory inference and interpolation methods. The results not only underscore the effectiveness of our method in inferring trajectories, but also highlight the benefit of performing interpolation and approximation that respect the inherent geometric properties of the data.
Read more5/31/2024
🔮
0
Uncertainty-Aware Pedestrian Trajectory Prediction via Distributional Diffusion
Yao Liu, Zesheng Ye, Rui Wang, Binghao Li, Quan Z. Sheng, Lina Yao
Tremendous efforts have been put forth on predicting pedestrian trajectory with generative models to accommodate uncertainty and multi-modality in human behaviors. An individual's inherent uncertainty, e.g., change of destination, can be masked by complex patterns resulting from the movements of interacting pedestrians. However, latent variable-based generative models often entangle such uncertainty with complexity, leading to limited either latent expressivity or predictive diversity. In this work, we propose to separately model these two factors by implicitly deriving a flexible latent representation to capture intricate pedestrian movements, while integrating predictive uncertainty of individuals with explicit bivariate Gaussian mixture densities over their future locations. More specifically, we present a model-agnostic uncertainty-aware pedestrian trajectory prediction framework, parameterizing sufficient statistics for the mixture of Gaussians that jointly comprise the multi-modal trajectories. We further estimate these parameters of interest by approximating a denoising process that progressively recovers pedestrian movements from noise. Unlike previous studies, we translate the predictive stochasticity to explicit distributions, allowing it to readily generate plausible future trajectories indicating individuals' self-uncertainty. Moreover, our framework is compatible with different neural net architectures. We empirically show the performance gains over state-of-the-art even with lighter backbones, across most scenes on two public benchmarks.
Read more5/14/2024