Hypergraph-based Motion Generation with Multi-modal Interaction Relational Reasoning

0
Sign in to get full access
Overview
- Develops a hypergraph-based approach for generating motion trajectories with multi-modal interaction
- Introduces a relational reasoning module to capture complex interactions between agents
- Demonstrates improved performance on benchmark datasets for motion prediction and generation tasks
Plain English Explanation
This research paper presents a new technique for generating motion trajectories that can handle complex interactions between different agents or objects. The key idea is to use a hypergraph-based representation to model the relationships between agents, which allows the system to capture more nuanced interactions compared to standard pairwise relationships.
The system also includes a relational reasoning module that analyzes the interactions between agents and uses this information to predict their future motions. This allows the model to generate motion trajectories that account for how the agents are influencing each other, rather than considering them in isolation.
Overall, this approach aims to enable more realistic and natural motion generation, which could be useful for applications like autonomous driving, robotics, and animation. By modeling the complex relationships between agents, the system can produce motion trajectories that are more consistent with real-world behavior.
Technical Explanation
The paper introduces a hypergraph-based representation to model the interactions between agents. In this framework, each agent is represented as a node in the hypergraph, and the relationships between agents are captured by hyperedges that can connect multiple nodes. This allows the model to represent more complex interactions than traditional pairwise relationships.
The authors also propose a relational reasoning module that analyzes the structure of the hypergraph to predict the future motion of the agents. This module uses a transformer-based architecture to extract features from the hypergraph and reason about the interactions between agents. The outputs of this module are then used to generate the final motion trajectories.
The model is trained and evaluated on several benchmark datasets for motion prediction and generation tasks. The results show that the hypergraph-based approach with relational reasoning outperforms existing methods, demonstrating the benefits of explicitly modeling the complex interactions between agents.
Critical Analysis
The paper presents a novel and promising approach for motion generation that addresses some of the limitations of existing techniques. By using a hypergraph representation and relational reasoning, the model can capture more nuanced interactions between agents, which is a key challenge in this domain.
However, the paper does not discuss some potential limitations or areas for further research. For example, the computational complexity of the hypergraph representation and reasoning module could be a concern, especially for real-time applications. Additionally, the paper does not explore how the model would perform in more cluttered or dynamic environments, where the interactions between agents may be even more complex.
Further research could also investigate ways to make the model more interpretable, so that users can understand the reasoning behind the generated motion trajectories. This could be particularly important for safety-critical applications like autonomous driving.
Conclusion
This research presents a novel hypergraph-based approach for motion generation that can effectively model complex interactions between agents. By incorporating a relational reasoning module, the system is able to generate motion trajectories that are more consistent with real-world behavior, which could have important applications in areas like robotics, animation, and autonomous driving.
While the paper demonstrates promising results, there are still opportunities for further research to address potential limitations and expand the capabilities of the model. Overall, this work represents an important step forward in the field of motion generation and interaction modeling.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Hypergraph-based Motion Generation with Multi-modal Interaction Relational Reasoning
Keshu Wu, Yang Zhou, Haotian Shi, Dominique Lord, Bin Ran, Xinyue Ye
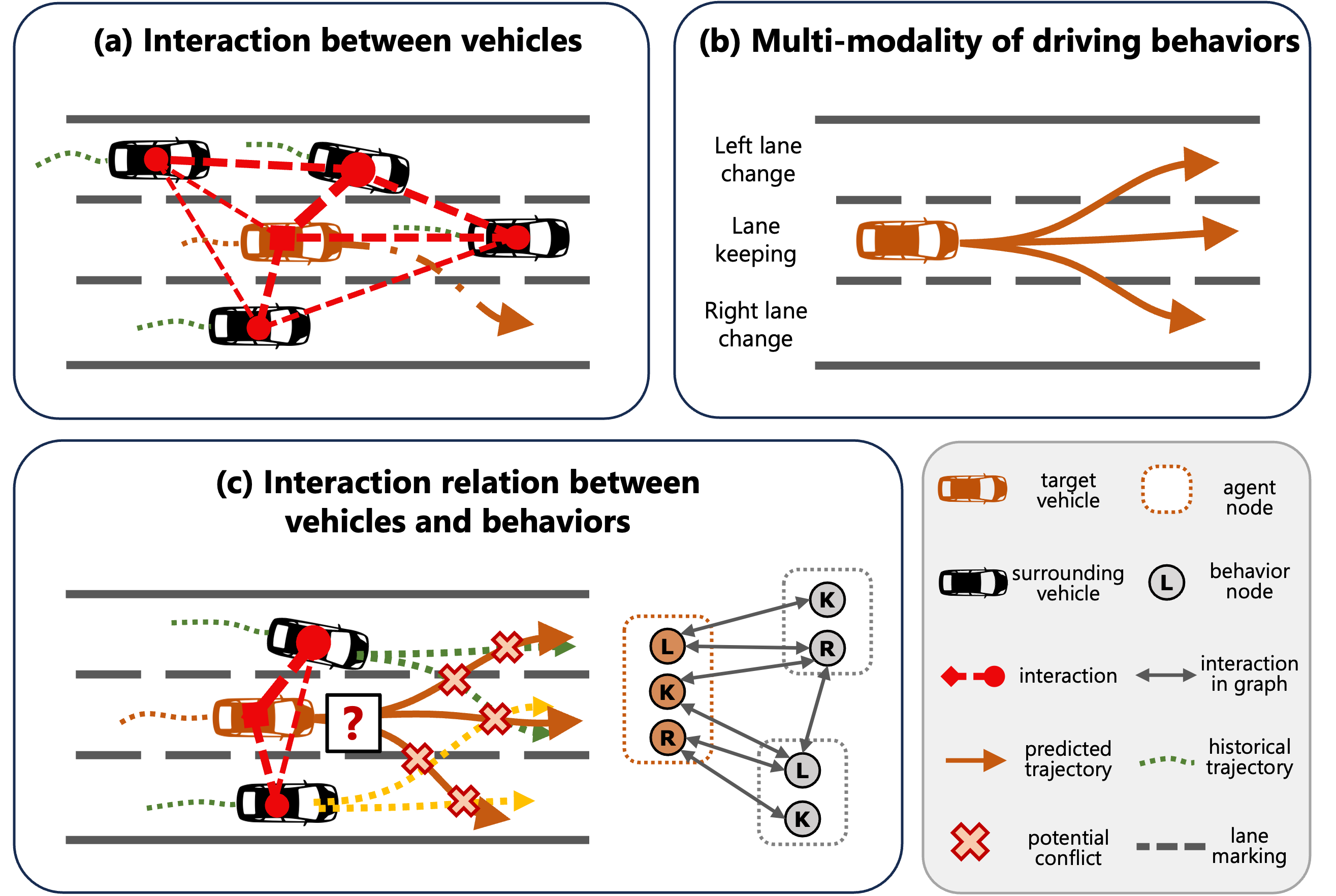
The intricate nature of real-world driving environments, characterized by dynamic and diverse interactions among multiple vehicles and their possible future states, presents considerable challenges in accurately predicting the motion states of vehicles and handling the uncertainty inherent in the predictions. Addressing these challenges requires comprehensive modeling and reasoning to capture the implicit relations among vehicles and the corresponding diverse behaviors. This research introduces an integrated framework for autonomous vehicles (AVs) motion prediction to address these complexities, utilizing a novel Relational Hypergraph Interaction-informed Neural mOtion generator (RHINO). RHINO leverages hypergraph-based relational reasoning by integrating a multi-scale hypergraph neural network to model group-wise interactions among multiple vehicles and their multi-modal driving behaviors, thereby enhancing motion prediction accuracy and reliability. Experimental validation using real-world datasets demonstrates the superior performance of this framework in improving predictive accuracy and fostering socially aware automated driving in dynamic traffic scenarios.
Read more9/19/2024
🗣️
0
Grounded Relational Inference: Domain Knowledge Driven Explainable Autonomous Driving
Chen Tang, Nishan Srishankar, Sujitha Martin, Masayoshi Tomizuka
Explainability is essential for autonomous vehicles and other robotics systems interacting with humans and other objects during operation. Humans need to understand and anticipate the actions taken by the machines for trustful and safe cooperation. In this work, we aim to develop an explainable model that generates explanations consistent with both human domain knowledge and the model's inherent causal relation. In particular, we focus on an essential building block of autonomous driving, multi-agent interaction modeling. We propose Grounded Relational Inference (GRI). It models an interactive system's underlying dynamics by inferring an interaction graph representing the agents' relations. We ensure a semantically meaningful interaction graph by grounding the relational latent space into semantic interactive behaviors defined with expert domain knowledge. We demonstrate that it can model interactive traffic scenarios under both simulation and real-world settings, and generate semantic graphs explaining the vehicle's behavior by their interactions.
Read more7/9/2024

0
Hybrid Imitation-Learning Motion Planner for Urban Driving
Cristian Gariboldi, Matteo Corno, Beng Jin
With the release of open source datasets such as nuPlan and Argoverse, the research around learning-based planners has spread a lot in the last years. Existing systems have shown excellent capabilities in imitating the human driver behaviour, but they struggle to guarantee safe closed-loop driving. Conversely, optimization-based planners offer greater security in short-term planning scenarios. To confront this challenge, in this paper we propose a novel hybrid motion planner that integrates both learning-based and optimization-based techniques. Initially, a multilayer perceptron (MLP) generates a human-like trajectory, which is then refined by an optimization-based component. This component not only minimizes tracking errors but also computes a trajectory that is both kinematically feasible and collision-free with obstacles and road boundaries. Our model effectively balances safety and human-likeness, mitigating the trade-off inherent in these objectives. We validate our approach through simulation experiments and further demonstrate its efficacy by deploying it in real-world self-driving vehicles.
Read more9/5/2024

0
Multi-modal Integrated Prediction and Decision-making with Adaptive Interaction Modality Explorations
Tong Li, Lu Zhang, Sikang Liu, Shaojie Shen
Navigating dense and dynamic environments poses a significant challenge for autonomous driving systems, owing to the intricate nature of multimodal interaction, wherein the actions of various traffic participants and the autonomous vehicle are complex and implicitly coupled. In this paper, we propose a novel framework, Multi-modal Integrated predictioN and Decision-making (MIND), which addresses the challenges by efficiently generating joint predictions and decisions covering multiple distinctive interaction modalities. Specifically, MIND leverages learning-based scenario predictions to obtain integrated predictions and decisions with social-consistent interaction modality and utilizes a modality-aware dynamic branching mechanism to generate scenario trees that efficiently capture the evolutions of distinctive interaction modalities with low variation of interaction uncertainty along the planning horizon. The scenario trees are seamlessly utilized by the contingency planning under interaction uncertainty to obtain clear and considerate maneuvers accounting for multi-modal evolutions. Comprehensive experimental results in the closed-loop simulation based on the real-world driving dataset showcase superior performance to other strong baselines under various driving contexts.
Read more8/29/2024