Hyperparameter Optimization for Driving Strategies Based on Reinforcement Learning

0

Sign in to get full access
Overview
- Hyperparameter optimization is crucial for training effective reinforcement learning (RL) models, especially for complex tasks like autonomous driving.
- This paper explores using Efficient Global Optimization (EGO) to optimize hyperparameters for RL-based driving strategies.
- EGO is an advanced optimization technique that can efficiently navigate high-dimensional hyperparameter spaces.
- The authors apply EGO to tune hyperparameters for an RL-based autonomous driving agent and demonstrate improved performance compared to manual tuning.
Plain English Explanation
Reinforcement learning is a type of machine learning where an agent learns to make good decisions by trial and error, receiving rewards or penalties based on its actions. This is a powerful approach, but it often requires carefully tuning many different hyperparameters - settings that control how the learning process works.
Hyperparameter Optimization is the process of finding the best set of hyperparameters for a given task. This paper explores using a technique called Efficient Global Optimization (EGO) to optimize the hyperparameters for an RL-based autonomous driving agent.
EGO is an advanced optimization algorithm that can efficiently search through high-dimensional spaces of potential hyperparameter values. By intelligently exploring this space, it can find good hyperparameter settings more quickly than manual trial-and-error.
The authors apply EGO to tune the hyperparameters of their RL-based driving agent and show that it outperforms manually tuned versions of the agent. This suggests that EGO can be a powerful tool for Autonomous Algorithm Training of RL agents for complex tasks like autonomous driving.
Technical Explanation
The paper focuses on using Efficient Global Optimization (EGO) to optimize the hyperparameters of a reinforcement learning-based autonomous driving agent.
EGO is a Bayesian optimization technique that builds a probabilistic model of the objective function (in this case, the performance of the driving agent) and uses that model to intelligently explore the hyperparameter space. This allows EGO to find good hyperparameter settings more efficiently than approaches like grid search or random search.
The authors apply EGO to tune hyperparameters like the learning rate, discount factor, and exploration rate for their RL-based driving agent. They evaluate the agent's performance on a simulated driving task and compare the results to manually tuned versions of the agent.
The results show that the EGO-optimized agent significantly outperforms the manually tuned agents, suggesting that Adaptive Hyperparameter Optimization techniques like EGO can be very effective for Hyperparameter Optimization in complex RL domains like autonomous driving.
Critical Analysis
The paper provides a compelling demonstration of how Efficient Global Optimization can be used to optimize the hyperparameters of an RL-based autonomous driving agent. However, a few potential limitations or areas for further research are worth noting:
-
The experiments were conducted in a simulated environment, so it's unclear how well the EGO-optimized agent would perform in the real world. Generalized Population-Based Training techniques may be needed to ensure robust performance in diverse real-world conditions.
-
The paper only considers a single RL algorithm (PPO) and driving task. It would be valuable to evaluate the effectiveness of EGO-based hyperparameter optimization across a wider range of RL algorithms and driving scenarios.
-
The authors do not provide much insight into the specific hyperparameters that were optimized or the final values selected by EGO. A more detailed discussion of the optimized hyperparameters and their impact on agent performance could yield additional insights.
Overall, this paper demonstrates the promise of Efficient Global Optimization for Hyperparameter Optimization in complex RL domains, but further research is needed to fully understand its capabilities and limitations.
Conclusion
This paper explores the use of Efficient Global Optimization (EGO) to optimize the hyperparameters of a reinforcement learning-based autonomous driving agent. The results show that EGO can significantly outperform manual hyperparameter tuning, suggesting that advanced Adaptive Hyperparameter Optimization techniques can be valuable for Autonomous Algorithm Training of RL agents for complex tasks like self-driving cars.
While the paper demonstrates the potential of EGO-based hyperparameter optimization, further research is needed to fully understand its capabilities and limitations, especially when deployed in real-world autonomous driving scenarios. Nonetheless, this work represents an important step forward in the development of Generalized Population-Based Training techniques for RL-based autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Hyperparameter Optimization for Driving Strategies Based on Reinforcement Learning
Nihal Acharya Adde, Hanno Gottschalk, Andreas Ebert
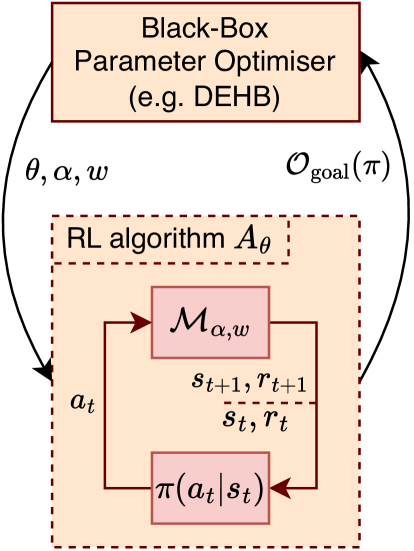
This paper focuses on hyperparameter optimization for autonomous driving strategies based on Reinforcement Learning. We provide a detailed description of training the RL agent in a simulation environment. Subsequently, we employ Efficient Global Optimization algorithm that uses Gaussian Process fitting for hyperparameter optimization in RL. Before this optimization phase, Gaussian process interpolation is applied to fit the surrogate model, for which the hyperparameter set is generated using Latin hypercube sampling. To accelerate the evaluation, parallelization techniques are employed. Following the hyperparameter optimization procedure, a set of hyperparameters is identified, resulting in a noteworthy enhancement in overall driving performance. There is a substantial increase of 4% when compared to existing manually tuned parameters and the hyperparameters discovered during the initialization process using Latin hypercube sampling. After the optimization, we analyze the obtained results thoroughly and conduct a sensitivity analysis to assess the robustness and generalization capabilities of the learned autonomous driving strategies. The findings from this study contribute to the advancement of Gaussian process based Bayesian optimization to optimize the hyperparameters for autonomous driving in RL, providing valuable insights for the development of efficient and reliable autonomous driving systems.
Read more7/22/2024
➖
0
Automatic Parameter Tuning of Self-Driving Vehicles
Hung-Ju Wu, Vladislav Nenchev, Christian Rathgeber
Modern automated driving solutions utilize trajectory planning and control components with numerous parameters that need to be tuned for different driving situations and vehicle types to achieve optimal performance. This paper proposes a method to automatically tune such parameters to resemble expert demonstrations. We utilize a cost function which captures deviations of the closed-loop operation of the controller from the recorded desired driving behavior. Parameter tuning is then accomplished by using local optimization techniques. Three optimization alternatives are compared in a case study, where a trajectory planner is tuned for lane following in a real-world driving scenario. The results suggest that the proposed approach improves manually tuned initial parameters significantly even with respect to noisy demonstration data.
Read more6/26/2024
0
Combining Automated Optimisation of Hyperparameters and Reward Shape
Julian Dierkes, Emma Cramer, Holger H. Hoos, Sebastian Trimpe
There has been significant progress in deep reinforcement learning (RL) in recent years. Nevertheless, finding suitable hyperparameter configurations and reward functions remains challenging even for experts, and performance heavily relies on these design choices. Also, most RL research is conducted on known benchmarks where knowledge about these choices already exists. However, novel practical applications often pose complex tasks for which no prior knowledge about good hyperparameters and reward functions is available, thus necessitating their derivation from scratch. Prior work has examined automatically tuning either hyperparameters or reward functions individually. We demonstrate empirically that an RL algorithm's hyperparameter configurations and reward function are often mutually dependent, meaning neither can be fully optimised without appropriate values for the other. We then propose a methodology for the combined optimisation of hyperparameters and the reward function. Furthermore, we include a variance penalty as an optimisation objective to improve the stability of learned policies. We conducted extensive experiments using Proximal Policy Optimisation and Soft Actor-Critic on four environments. Our results show that combined optimisation significantly improves over baseline performance in half of the environments and achieves competitive performance in the others, with only a minor increase in computational costs. This suggests that combined optimisation should be best practice.
Read more6/27/2024
🤿
0
Research on Autonomous Driving Decision-making Strategies based Deep Reinforcement Learning
Zixiang Wang, Hao Yan, Changsong Wei, Junyu Wang, Shi Bo, Minheng Xiao
The behavior decision-making subsystem is a key component of the autonomous driving system, which reflects the decision-making ability of the vehicle and the driver, and is an important symbol of the high-level intelligence of the vehicle. However, the existing rule-based decision-making schemes are limited by the prior knowledge of designers, and it is difficult to cope with complex and changeable traffic scenarios. In this work, an advanced deep reinforcement learning model is adopted, which can autonomously learn and optimize driving strategies in a complex and changeable traffic environment by modeling the driving decision-making process as a reinforcement learning problem. Specifically, we used Deep Q-Network (DQN) and Proximal Policy Optimization (PPO) for comparative experiments. DQN guides the agent to choose the best action by approximating the state-action value function, while PPO improves the decision-making quality by optimizing the policy function. We also introduce improvements in the design of the reward function to promote the robustness and adaptability of the model in real-world driving situations. Experimental results show that the decision-making strategy based on deep reinforcement learning has better performance than the traditional rule-based method in a variety of driving tasks.
Read more8/7/2024