Generalized Population-Based Training for Hyperparameter Optimization in Reinforcement Learning

0

Sign in to get full access
Overview
- This paper proposes a generalized population-based training (PBT) algorithm for hyperparameter optimization in reinforcement learning (RL) tasks.
- The algorithm allows for efficient exploration of the hyperparameter space by maintaining a population of RL agents and updating their hyperparameters based on performance.
- The researchers demonstrate the effectiveness of their approach on several RL benchmark tasks, showing improved sample efficiency and final performance compared to standard hyperparameter tuning methods.
Plain English Explanation
The paper describes a new way to tune the hyperparameters, or settings, of reinforcement learning (RL) algorithms. Hyperparameters are important knobs that need to be adjusted to get the best performance from RL algorithms, but finding the right values can be challenging.
The researchers' approach, called "generalized population-based training" (PBT), works by maintaining a group or "population" of RL agents, each with its own set of hyperparameters. The agents are trained in parallel, and the hyperparameters of the best-performing agents are then used to update the hyperparameters of the lower-performing agents. This allows the algorithm to efficiently explore different hyperparameter settings and "evolve" towards better performance.
By using this population-based approach, the researchers show that their method can achieve better results on standard RL benchmark tasks, compared to traditional hyperparameter tuning methods. The paper on scaling population-based reinforcement learning on GPUs provides further insights into how this approach can be scaled up using GPU acceleration.
The paper on sample efficiency abstractions for potential-based reward shaping and the paper on online continuous hyperparameter optimization with generalized linear contextual are also relevant, as they explore different techniques for improving the sample efficiency and hyperparameter optimization of RL algorithms.
Technical Explanation
The key innovation of this paper is the generalized population-based training (PBT) algorithm for hyperparameter optimization in RL. The algorithm maintains a population of RL agents, each with its own set of hyperparameters. These agents are trained in parallel, and their performance is evaluated periodically.
The best-performing agents are then used to "exploit" the hyperparameter space by transferring their hyperparameters to the lower-performing agents. This exploration-exploitation tradeoff allows the algorithm to efficiently search the hyperparameter space and converge to high-performing configurations.
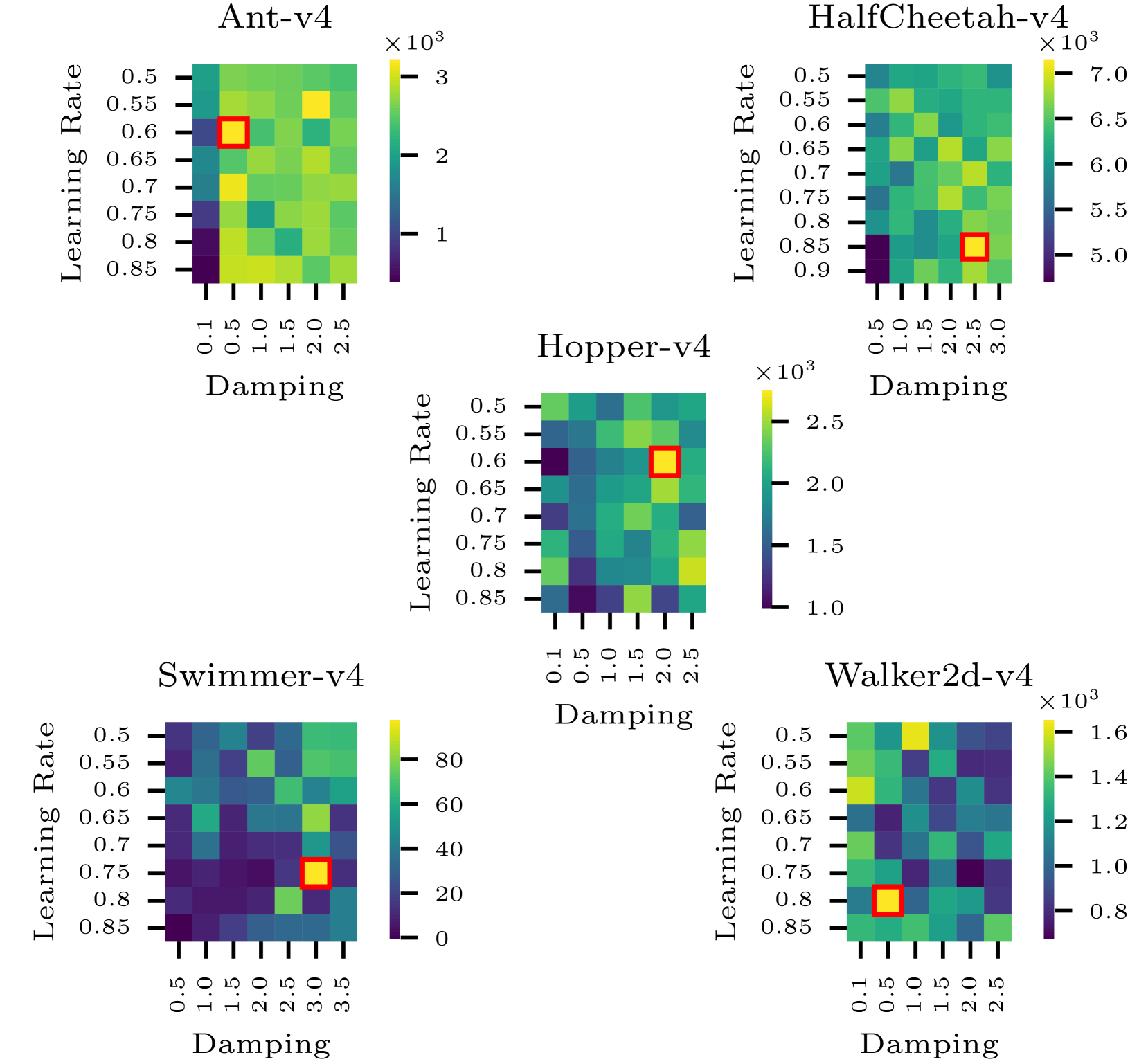
The researchers evaluate their approach on several RL benchmark tasks, including robotic control and game-playing environments. They show that their generalized PBT algorithm outperforms standard hyperparameter tuning methods in terms of both sample efficiency and final performance.
The paper on multi-AGV path planning via reinforcement learning and the paper on the "transform-then-explore" technique for exploration provide additional context on the use of RL techniques for solving complex optimization problems.
Critical Analysis
The researchers provide a thorough evaluation of their generalized PBT algorithm, demonstrating its effectiveness on a range of RL benchmark tasks. However, the paper does not address some potential limitations of the approach:
-
Scalability: While the researchers mention the ability to scale the population-based approach using GPU acceleration, the paper does not provide a detailed analysis of the computational and memory requirements of the algorithm.
-
Sensitivity to Hyperparameters: The performance of the generalized PBT algorithm may be sensitive to the choice of its own hyperparameters, such as the population size and update frequency. The paper does not explore the robustness of the algorithm to these design choices.
-
Applicability to Other Domains: The evaluation is limited to standard RL benchmark tasks, and the paper does not discuss the potential applicability of the generalized PBT approach to other machine learning domains, such as supervised learning or unsupervised learning.
Despite these limitations, the paper represents a significant contribution to the field of hyperparameter optimization for RL, and the generalized PBT algorithm has the potential to improve the sample efficiency and performance of a wide range of RL applications.
Conclusion
This paper presents a novel generalized population-based training (PBT) algorithm for efficient hyperparameter optimization in reinforcement learning (RL) tasks. By maintaining a population of RL agents and updating their hyperparameters based on performance, the algorithm is able to explore the hyperparameter space effectively and converge to high-performing configurations.
The researchers demonstrate the effectiveness of their approach on several RL benchmark tasks, showing improved sample efficiency and final performance compared to standard hyperparameter tuning methods. While the paper does not address all potential limitations of the approach, it represents an important contribution to the field of RL and provides a promising direction for further research and development in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Generalized Population-Based Training for Hyperparameter Optimization in Reinforcement Learning
Hui Bai, Ran Cheng
Hyperparameter optimization plays a key role in the machine learning domain. Its significance is especially pronounced in reinforcement learning (RL), where agents continuously interact with and adapt to their environments, requiring dynamic adjustments in their learning trajectories. To cater to this dynamicity, the Population-Based Training (PBT) was introduced, leveraging the collective intelligence of a population of agents learning simultaneously. However, PBT tends to favor high-performing agents, potentially neglecting the explorative potential of agents on the brink of significant advancements. To mitigate the limitations of PBT, we present the Generalized Population-Based Training (GPBT), a refined framework designed for enhanced granularity and flexibility in hyperparameter adaptation. Complementing GPBT, we further introduce Pairwise Learning (PL). Instead of merely focusing on elite agents, PL employs a comprehensive pairwise strategy to identify performance differentials and provide holistic guidance to underperforming agents. By integrating the capabilities of GPBT and PL, our approach significantly improves upon traditional PBT in terms of adaptability and computational efficiency. Rigorous empirical evaluations across a range of RL benchmarks confirm that our approach consistently outperforms not only the conventional PBT but also its Bayesian-optimized variant.
Read more4/24/2024
0
Simultaneous Training of First- and Second-Order Optimizers in Population-Based Reinforcement Learning
Felix Pfeiffer, Shahram Eivazi
The tuning of hyperparameters in reinforcement learning (RL) is critical, as these parameters significantly impact an agent's performance and learning efficiency. Dynamic adjustment of hyperparameters during the training process can significantly enhance both the performance and stability of learning. Population-based training (PBT) provides a method to achieve this by continuously tuning hyperparameters throughout the training. This ongoing adjustment enables models to adapt to different learning stages, resulting in faster convergence and overall improved performance. In this paper, we propose an enhancement to PBT by simultaneously utilizing both first- and second-order optimizers within a single population. We conducted a series of experiments using the TD3 algorithm across various MuJoCo environments. Our results, for the first time, empirically demonstrate the potential of incorporating second-order optimizers within PBT-based RL. Specifically, the combination of the K-FAC optimizer with Adam led to up to a 10% improvement in overall performance compared to PBT using only Adam. Additionally, in environments where Adam occasionally fails, such as the Swimmer environment, the mixed population with K-FAC exhibited more reliable learning outcomes, offering a significant advantage in training stability without a substantial increase in computational time.
Read more9/5/2024
0
Scaling Population-Based Reinforcement Learning with GPU Accelerated Simulation
Asad Ali Shahid, Yashraj Narang, Vincenzo Petrone, Enrico Ferrentino, Ankur Handa, Dieter Fox, Marco Pavone, Loris Roveda
In recent years, deep reinforcement learning (RL) has shown its effectiveness in solving complex continuous control tasks like locomotion and dexterous manipulation. However, this comes at the cost of an enormous amount of experience required for training, exacerbated by the sensitivity of learning efficiency and the policy performance to hyperparameter selection, which often requires numerous trials of time-consuming experiments. This work introduces a Population-Based Reinforcement Learning (PBRL) approach that exploits a GPU-accelerated physics simulator to enhance the exploration capabilities of RL by concurrently training multiple policies in parallel. The PBRL framework is applied to three state-of-the-art RL algorithms - PPO, SAC, and DDPG - dynamically adjusting hyperparameters based on the performance of learning agents. The experiments are performed on four challenging tasks in Isaac Gym - Anymal Terrain, Shadow Hand, Humanoid, Franka Nut Pick - by analyzing the effect of population size and mutation mechanisms for hyperparameters. The results demonstrate that PBRL agents outperform non-evolutionary baseline agents across tasks essential for humanoid robots, such as bipedal locomotion, manipulation, and grasping in unstructured environments. The trained agents are finally deployed in the real world for the Franka Nut Pick manipulation task. To our knowledge, this is the first sim-to-real attempt for successfully deploying PBRL agents on real hardware. Code and videos of the learned policies are available on our project website (https://sites.google.com/view/pbrl).
Read more6/26/2024

0
Hyperparameter Optimization for Driving Strategies Based on Reinforcement Learning
Nihal Acharya Adde, Hanno Gottschalk, Andreas Ebert
This paper focuses on hyperparameter optimization for autonomous driving strategies based on Reinforcement Learning. We provide a detailed description of training the RL agent in a simulation environment. Subsequently, we employ Efficient Global Optimization algorithm that uses Gaussian Process fitting for hyperparameter optimization in RL. Before this optimization phase, Gaussian process interpolation is applied to fit the surrogate model, for which the hyperparameter set is generated using Latin hypercube sampling. To accelerate the evaluation, parallelization techniques are employed. Following the hyperparameter optimization procedure, a set of hyperparameters is identified, resulting in a noteworthy enhancement in overall driving performance. There is a substantial increase of 4% when compared to existing manually tuned parameters and the hyperparameters discovered during the initialization process using Latin hypercube sampling. After the optimization, we analyze the obtained results thoroughly and conduct a sensitivity analysis to assess the robustness and generalization capabilities of the learned autonomous driving strategies. The findings from this study contribute to the advancement of Gaussian process based Bayesian optimization to optimize the hyperparameters for autonomous driving in RL, providing valuable insights for the development of efficient and reliable autonomous driving systems.
Read more7/22/2024