Inspection planning under execution uncertainty

0
➖
Sign in to get full access
Overview
- This paper presents a novel algorithm called IRIS-U^2 (Inspection-planning under Uncertainty) for autonomous inspection tasks in uncertain environments.
- The algorithm builds upon the existing IRIS framework for deterministic inspection planning, adding the ability to handle localization errors and execution uncertainty common in urban settings.
- IRIS-U^2 provides statistical guarantees on coverage, path length, and collision probability during the inspection process.
Plain English Explanation
When robots or drones perform autonomous inspection tasks, such as surveying bridges or other infrastructure, they need to navigate to specific points of interest (POIs) to gather observations. However, in urban environments, inaccuracies in the robot's localization (position tracking) can introduce uncertainty and make it challenging to reliably complete these inspection tasks.
The IRIS-U^2 algorithm addresses this issue by explicitly accounting for execution uncertainty. It builds on the existing IRIS framework for inspection planning, which is highly efficient and can find optimal paths. IRIS-U^2 extends this by using a refined search procedure and Monte Carlo sampling to estimate the probability of covering each POI and the likelihood of collisions along the path.
This allows the algorithm to provide statistical guarantees about the expected coverage, path length, and collision probability during the inspection task. The researchers demonstrate the effectiveness of IRIS-U^2 through a case study on inspecting bridges, showing that it can improve expected coverage, reduce collision risk, and yield more precise statistical guarantees as the number of samples increases.
Additionally, the paper explores the potential benefits of computing bounded sub-optimal solutions to reduce computation time while still maintaining the statistical guarantees.
Technical Explanation
The IRIS-U^2 algorithm builds upon the existing IRIS framework for deterministic inspection planning, which is known to be highly efficient and provably asymptotically-optimal. To handle the much more involved uncertain setting, the researchers introduce a refined search procedure that estimates the probability of covering each point of interest (POI) using Monte Carlo (MC) sampling.
This Monte Carlo-based approach allows IRIS-U^2 to compute statistical guarantees regarding the expected coverage, path length, and collision probability during the inspection task. The algorithm iteratively constructs a set of candidate inspection paths, evaluating the coverage and collision probability for each using the MC sampling process.
The researchers demonstrate the efficacy of IRIS-U^2 through a case study focused on structural inspections of bridges. The results show that their approach exhibits improved expected coverage, reduced collision probability, and yields increasingly precise statistical guarantees as the number of MC samples grows.
Furthermore, the paper explores the potential advantages of computing bounded sub-optimal solutions to reduce computation time while maintaining the statistical guarantees. This could be particularly useful in time-sensitive applications or when dealing with limited computational resources.
Critical Analysis
The paper presents a comprehensive and well-designed study, addressing an important challenge in autonomous inspection tasks. By incorporating execution uncertainty into the planning process, IRIS-U^2 represents a significant advancement over existing algorithms that do not explicitly account for localization errors.
However, the paper does acknowledge some potential limitations and areas for further research. For example, the authors note that the Monte Carlo sampling approach, while effective, can be computationally intensive as the number of samples increases. Exploring more efficient uncertainty quantification techniques could help to further improve the algorithm's scalability.
Additionally, the paper focuses primarily on a single case study involving bridge inspections. While this provides a useful demonstration, it would be valuable to see the algorithm evaluated on a broader range of inspection tasks and environments to assess its generalizability.
Furthermore, the paper does not discuss the potential impact of sensor accuracy or environmental factors (e.g., weather, lighting) on the algorithm's performance. Incorporating these considerations into the uncertainty modeling could enhance the realism and applicability of the approach.
Overall, the IRIS-U^2 algorithm represents a significant contribution to the field of autonomous inspection planning, and the researchers have done an excellent job of demonstrating its potential advantages. Addressing the aforementioned limitations and exploring additional real-world applications could further strengthen the impact of this work.
Conclusion
The IRIS-U^2 algorithm presented in this paper offers a novel approach to autonomous inspection planning that explicitly accounts for execution uncertainty, a crucial challenge in urban environments. By building upon the efficient and optimal IRIS framework and incorporating Monte Carlo sampling to estimate coverage and collision probabilities, IRIS-U^2 provides statistical guarantees that can improve the reliability and effectiveness of autonomous inspection tasks.
The case study on bridge inspections showcases the algorithm's ability to enhance expected coverage, reduce collision risk, and yield increasingly precise statistical guarantees as the number of samples increases. Additionally, the exploration of bounded sub-optimal solutions highlights the potential to balance computational efficiency and statistical guarantees, which could be valuable in time-sensitive or resource-constrained applications.
Overall, the IRIS-U^2 algorithm represents a significant advancement in the field of autonomous inspection planning, addressing a critical gap in existing approaches. Further research to address the identified limitations and explore a broader range of real-world applications could unlock even greater potential for this innovative technique.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
➖
0
Inspection planning under execution uncertainty
Shmuel David Alpert, Kiril Solovey, Itzik Klein, Oren Salzman
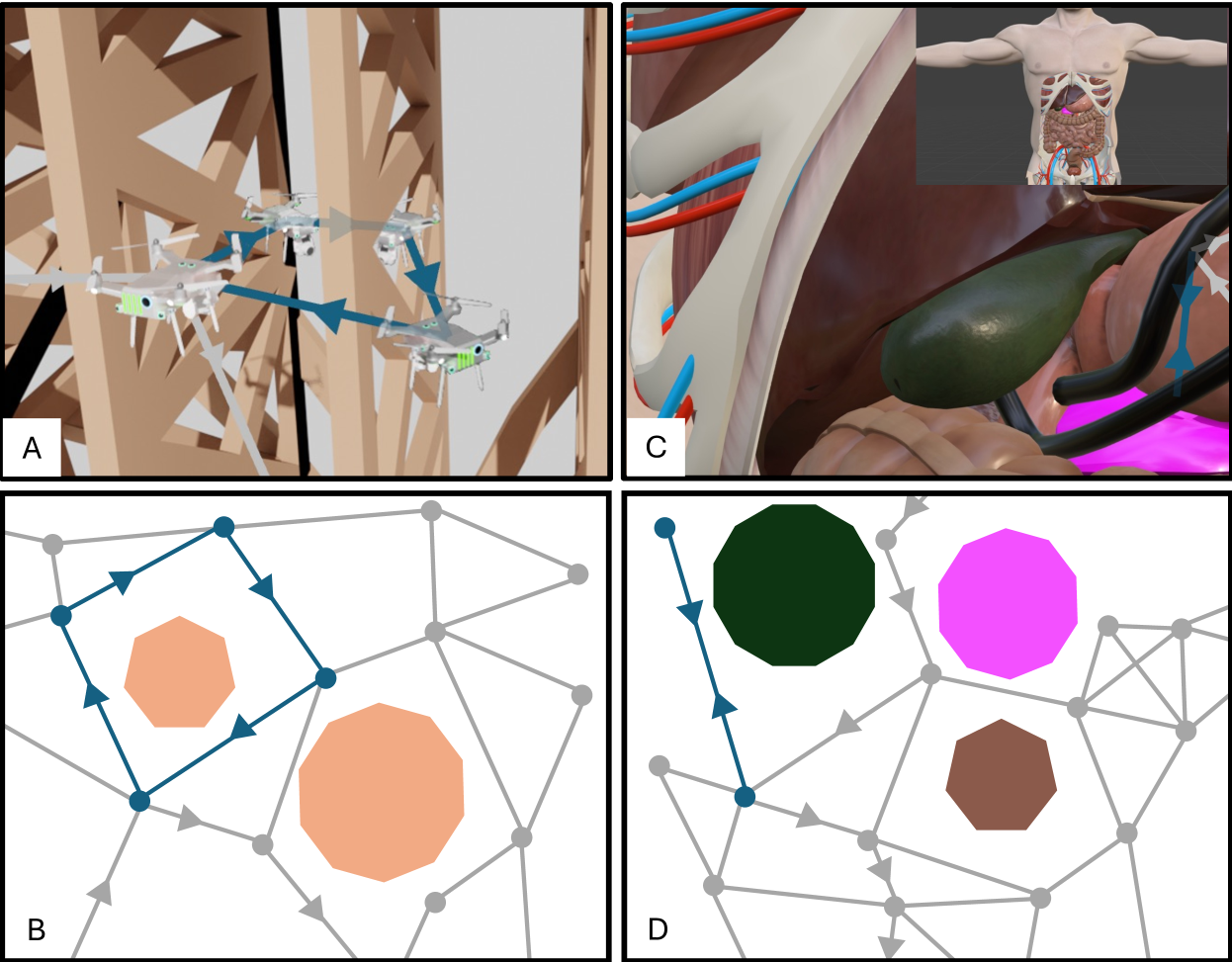
Autonomous inspection tasks necessitate path-planning algorithms to efficiently gather observations from points of interest (POI). However, localization errors commonly encountered in urban environments can introduce execution uncertainty, posing challenges to successfully completing such tasks. Unfortunately, existing algorithms for inspection planning do not explicitly account for execution uncertainty, which can hinder their performance. To bridge this gap, we present IRIS-under uncertainty (IRIS-U^2), the first inspection-planning algorithm that offers statistical guarantees regarding coverage, path length, and collision probability. Our approach builds upon IRIS -- our framework for deterministic inspection planning, which is highly efficient and provably asymptotically-optimal. The extension to the much more involved uncertain setting is achieved by a refined search procedure that estimates POI coverage probabilities using Monte Carlo (MC) sampling. The efficacy of IRIS-U^2 is demonstrated through a case study focusing on structural inspections of bridges. Our approach exhibits improved expected coverage, reduced collision probability, and yields increasingly precise statistical guarantees as the number of MC samples grows. Furthermore, we demonstrate the potential advantages of computing bounded sub-optimal solutions to reduce computation time while maintaining statistical guarantees.
Read more4/12/2024
0
Leveraging Fixed-Parameter Tractability for Robot Inspection Planning
Yosuke Mizutani, Daniel Coimbra Salomao, Alex Crane, Matthias Bentert, P{aa}l Gr{o}n{aa}s Drange, Felix Reidl, Alan Kuntz, Blair D. Sullivan
Autonomous robotic inspection, where a robot moves through its environment and inspects points of interest, has applications in industrial settings, structural health monitoring, and medicine. Planning the paths for a robot to safely and efficiently perform such an inspection is an extremely difficult algorithmic challenge. In this work we consider an abstraction of the inspection planning problem which we term Graph Inspection. We give two exact algorithms for this problem, using dynamic programming and integer linear programming. We analyze the performance of these methods, and present multiple approaches to achieve scalability. We demonstrate significant improvement both in path weight and inspection coverage over a state-of-the-art approach on two robotics tasks in simulation, a bridge inspection task by a UAV and a surgical inspection task using a medical robot.
Read more7/2/2024

0
Introspective Planning: Aligning Robots' Uncertainty with Inherent Task Ambiguity
Kaiqu Liang, Zixu Zhang, Jaime Fern'andez Fisac
Large language models (LLMs) exhibit advanced reasoning skills, enabling robots to comprehend natural language instructions and strategically plan high-level actions through proper grounding. However, LLM hallucination may result in robots confidently executing plans that are misaligned with user goals or, in extreme cases, unsafe. Additionally, inherent ambiguity in natural language instructions can induce task uncertainty, particularly in situations where multiple valid options exist. To address this issue, LLMs must identify such uncertainty and proactively seek clarification. This paper explores the concept of introspective planning as a systematic method for guiding LLMs in forming uncertainty--aware plans for robotic task execution without the need for fine-tuning. We investigate uncertainty quantification in task-level robot planning and demonstrate that introspection significantly improves both success rates and safety compared to state-of-the-art LLM-based planning approaches. Furthermore, we assess the effectiveness of introspective planning in conjunction with conformal prediction, revealing that this combination yields tighter confidence bounds, thereby maintaining statistical success guarantees with fewer superfluous user clarification queries. Code is available at https://github.com/kevinliang888/IntroPlan.
Read more6/5/2024
🔮
0
Probabilistic Uncertainty Quantification of Prediction Models with Application to Visual Localization
Junan Chen, Josephine Monica, Wei-Lun Chao, Mark Campbell
The uncertainty quantification of prediction models (e.g., neural networks) is crucial for their adoption in many robotics applications. This is arguably as important as making accurate predictions, especially for safety-critical applications such as self-driving cars. This paper proposes our approach to uncertainty quantification in the context of visual localization for autonomous driving, where we predict locations from images. Our proposed framework estimates probabilistic uncertainty by creating a sensor error model that maps an internal output of the prediction model to the uncertainty. The sensor error model is created using multiple image databases of visual localization, each with ground-truth location. We demonstrate the accuracy of our uncertainty prediction framework using the Ithaca365 dataset, which includes variations in lighting, weather (sunny, snowy, night), and alignment errors between databases. We analyze both the predicted uncertainty and its incorporation into a Kalman-based localization filter. Our results show that prediction error variations increase with poor weather and lighting condition, leading to greater uncertainty and outliers, which can be predicted by our proposed uncertainty model. Additionally, our probabilistic error model enables the filter to remove ad hoc sensor gating, as the uncertainty automatically adjusts the model to the input data
Read more4/9/2024