Intervention-Assisted Policy Gradient Methods for Online Stochastic Queuing Network Optimization: Technical Report
2404.04106
0
0

Abstract
Deep Reinforcement Learning (DRL) offers a powerful approach to training neural network control policies for stochastic queuing networks (SQN). However, traditional DRL methods rely on offline simulations or static datasets, limiting their real-world application in SQN control. This work proposes Online Deep Reinforcement Learning-based Controls (ODRLC) as an alternative, where an intelligent agent interacts directly with a real environment and learns an optimal control policy from these online interactions. SQNs present a challenge for ODRLC due to the unbounded nature of the queues within the network resulting in an unbounded state-space. An unbounded state-space is particularly challenging for neural network policies as neural networks are notoriously poor at extrapolating to unseen states. To address this challenge, we propose an intervention-assisted framework that leverages strategic interventions from known stable policies to ensure the queue sizes remain bounded. This framework combines the learning power of neural networks with the guaranteed stability of classical control policies for SQNs. We introduce a method to design these intervention-assisted policies to ensure strong stability of the network. Furthermore, we extend foundational DRL theorems for intervention-assisted policies and develop two practical algorithms specifically for ODRLC of SQNs. Finally, we demonstrate through experiments that our proposed algorithms outperform both classical control approaches and prior ODRLC algorithms.
Create account to get full access
Overview
- This technical paper presents a new reinforcement learning method called "Intervention-Assisted Policy Gradient" for optimizing online stochastic queuing network systems.
- The method combines policy gradient techniques with human intervention to improve the efficiency and performance of the optimization process.
- Key contributions include a formal problem formulation, the intervention-assisted policy gradient algorithm, and experimental results on simulated queuing networks.
Plain English Explanation
The paper describes a new way to optimize the operation of complex network systems, like transportation or logistics networks, in real-time. Traditional optimization methods can struggle with these types of "stochastic" systems that have a lot of unpredictable variability.
The researchers developed a reinforcement learning approach that combines automated policy optimization with occasional human guidance or "interventions." The idea is that the AI system can learn to make good decisions on its own, but a human expert can step in periodically to provide feedback or corrections when needed. This "intervention-assisted" approach aims to make the optimization process more efficient and effective compared to a fully automated system.
The authors tested their method on simulated queuing network problems, which are simplified models of real-world systems like airport security lines or package delivery networks. They showed that their intervention-assisted approach outperformed standard reinforcement learning techniques, suggesting it could be a useful tool for optimizing complex operational systems in practice.
Technical Explanation
The paper introduces the Online Stochastic Queuing Network Optimization problem, where the goal is to dynamically control the flows and service rates in a queuing network to minimize overall delay and cost. The authors formulate this as a Markov Decision Process and propose an Intervention-Assisted Policy Gradient (IAPG) method to solve it.
IAPG augments standard policy gradient reinforcement learning with occasional human interventions. The agent learns a policy to control the queuing network, but a human expert can occasionally provide corrections or guidance to the agent when it appears to be making suboptimal decisions. The authors derive the IAPG algorithm and show that it converges to a locally optimal policy under certain conditions.
The paper also includes experiments on simulated Continuous Control queuing network environments. The results demonstrate that IAPG outperforms standard policy gradient and other baselines, suggesting the human intervention can significantly improve the efficiency of the optimization process.
Critical Analysis
The key strength of this work is the innovative combination of automated reinforcement learning with human expertise to tackle a challenging control problem. The Inverse Reinforcement Learning technique of incorporating human interventions is an interesting approach that could have broader applicability.
However, the paper does not extensively explore the limitations or failure modes of the IAPG algorithm. For example, it is unclear how sensitive the method is to the frequency or quality of human interventions, or how it would scale to larger, more complex queuing network problems. Additionally, the experimental evaluation is limited to simulated environments, so further research is needed to validate the approach on real-world Electric Autonomous Mobility Demand systems.
Overall, this is a promising line of research that merits further investigation. Combining human expertise with automated optimization has the potential to yield more robust and practical solutions for complex operational problems.
Conclusion
This paper presents a novel reinforcement learning method called Intervention-Assisted Policy Gradient (IAPG) for optimizing online stochastic queuing network systems. The key idea is to incorporate occasional human guidance or "interventions" into the policy optimization process, leveraging both automated learning and human expertise.
The authors demonstrate that IAPG outperforms standard policy gradient techniques on simulated queuing network problems, suggesting it could be a useful tool for real-world operational optimization tasks. While further research is needed to fully validate the approach, this work represents an interesting step towards blending human and machine intelligence to solve complex control problems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Strategically Conservative Q-Learning
Yutaka Shimizu, Joey Hong, Sergey Levine, Masayoshi Tomizuka
0
0
Offline reinforcement learning (RL) is a compelling paradigm to extend RL's practical utility by leveraging pre-collected, static datasets, thereby avoiding the limitations associated with collecting online interactions. The major difficulty in offline RL is mitigating the impact of approximation errors when encountering out-of-distribution (OOD) actions; doing so ineffectively will lead to policies that prefer OOD actions, which can lead to unexpected and potentially catastrophic results. Despite the variety of works proposed to address this issue, they tend to excessively suppress the value function in and around OOD regions, resulting in overly pessimistic value estimates. In this paper, we propose a novel framework called Strategically Conservative Q-Learning (SCQ) that distinguishes between OOD data that is easy and hard to estimate, ultimately resulting in less conservative value estimates. Our approach exploits the inherent strengths of neural networks to interpolate, while carefully navigating their limitations in extrapolation, to obtain pessimistic yet still property calibrated value estimates. Theoretical analysis also shows that the value function learned by SCQ is still conservative, but potentially much less so than that of Conservative Q-learning (CQL). Finally, extensive evaluation on the D4RL benchmark tasks shows our proposed method outperforms state-of-the-art methods. Our code is available through url{https://github.com/purewater0901/SCQ}.
6/10/2024
A Novel Joint DRL-Based Utility Optimization for UAV Data Services
Xuli Cai, Poonam Lohan, Burak Kantarci
0
0
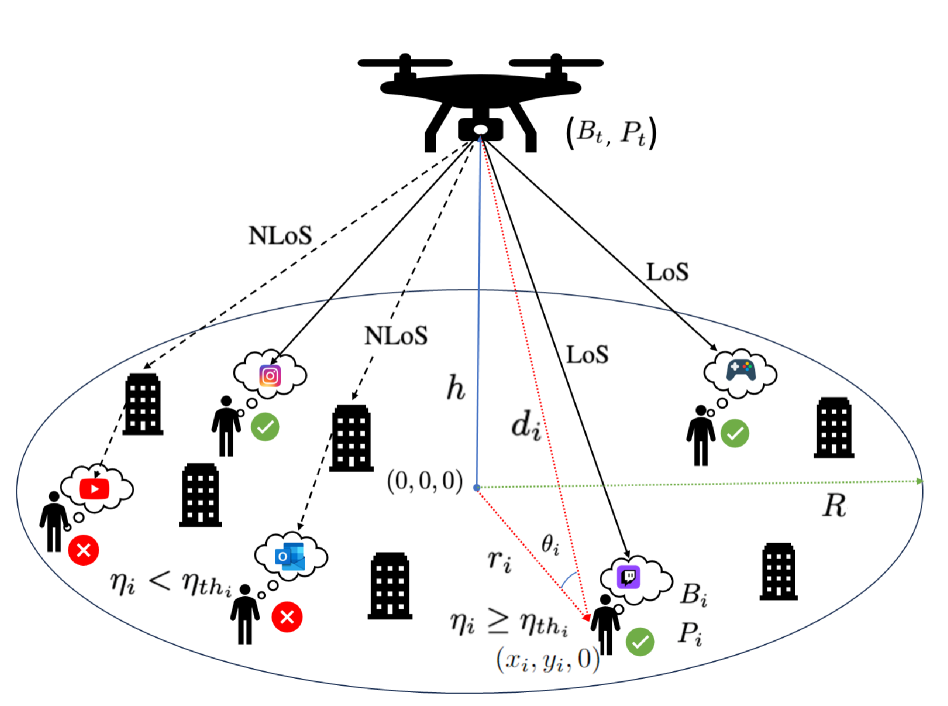
In this paper, we propose a novel joint deep reinforcement learning (DRL)-based solution to optimize the utility of an uncrewed aerial vehicle (UAV)-assisted communication network. To maximize the number of users served within the constraints of the UAV's limited bandwidth and power resources, we employ deep Q-Networks (DQN) and deep deterministic policy gradient (DDPG) algorithms for optimal resource allocation to ground users with heterogeneous data rate demands. The DQN algorithm dynamically allocates multiple bandwidth resource blocks to different users based on current demand and available resource states. Simultaneously, the DDPG algorithm manages power allocation, continuously adjusting power levels to adapt to varying distances and fading conditions, including Rayleigh fading for non-line-of-sight (NLoS) links and Rician fading for line-of-sight (LoS) links. Our joint DRL-based solution demonstrates an increase of up to 41% in the number of users served compared to scenarios with equal bandwidth and power allocation.
6/18/2024
🤿
Quantum Deep Reinforcement Learning for Robot Navigation Tasks
Hans Hohenfeld, Dirk Heimann, Felix Wiebe, Frank Kirchner
0
0
We utilize hybrid quantum deep reinforcement learning to learn navigation tasks for a simple, wheeled robot in simulated environments of increasing complexity. For this, we train parameterized quantum circuits (PQCs) with two different encoding strategies in a hybrid quantum-classical setup as well as a classical neural network baseline with the double deep Q network (DDQN) reinforcement learning algorithm. Quantum deep reinforcement learning (QDRL) has previously been studied in several relatively simple benchmark environments, mainly from the OpenAI gym suite. However, scaling behavior and applicability of QDRL to more demanding tasks closer to real-world problems e. g., from the robotics domain, have not been studied previously. Here, we show that quantum circuits in hybrid quantum-classic reinforcement learning setups are capable of learning optimal policies in multiple robotic navigation scenarios with notably fewer trainable parameters compared to a classical baseline. Across a large number of experimental configurations, we find that the employed quantum circuits outperform the classical neural network baselines when equating for the number of trainable parameters. Yet, the classical neural network consistently showed better results concerning training times and stability, with at least one order of magnitude of trainable parameters more than the best-performing quantum circuits. However, validating the robustness of the learning methods in a large and dynamic environment, we find that the classical baseline produces more stable and better performing policies overall.
6/26/2024
🏅
Learning to Stabilize Online Reinforcement Learning in Unbounded State Spaces
Brahma S. Pavse, Matthew Zurek, Yudong Chen, Qiaomin Xie, Josiah P. Hanna
0
0
In many reinforcement learning (RL) applications, we want policies that reach desired states and then keep the controlled system within an acceptable region around the desired states over an indefinite period of time. This latter objective is called stability and is especially important when the state space is unbounded, such that the states can be arbitrarily far from each other and the agent can drift far away from the desired states. For example, in stochastic queuing networks, where queues of waiting jobs can grow without bound, the desired state is all-zero queue lengths. Here, a stable policy ensures queue lengths are finite while an optimal policy minimizes queue lengths. Since an optimal policy is also stable, one would expect that RL algorithms would implicitly give us stable policies. However, in this work, we find that deep RL algorithms that directly minimize the distance to the desired state during online training often result in unstable policies, i.e., policies that drift far away from the desired state. We attribute this instability to poor credit-assignment for destabilizing actions. We then introduce an approach based on two ideas: 1) a Lyapunov-based cost-shaping technique and 2) state transformations to the unbounded state space. We conduct an empirical study on various queueing networks and traffic signal control problems and find that our approach performs competitively against strong baselines with knowledge of the transition dynamics. Our code is available here: https://github.com/Badger-RL/STOP.
5/28/2024