LARM: Large Auto-Regressive Model for Long-Horizon Embodied Intelligence
2405.17424
0
0

Abstract
Due to the need to interact with the real world, embodied agents are required to possess comprehensive prior knowledge, long-horizon planning capability, and a swift response speed. Despite recent large language model (LLM) based agents achieving promising performance, they still exhibit several limitations. For instance, the output of LLMs is a descriptive sentence, which is ambiguous when determining specific actions. To address these limitations, we introduce the large auto-regressive model (LARM). LARM leverages both text and multi-view images as input and predicts subsequent actions in an auto-regressive manner. To train LARM, we develop a novel data format named auto-regressive node transmission structure and assemble a corresponding dataset. Adopting a two-phase training regimen, LARM successfully harvests enchanted equipment in Minecraft, which demands significantly more complex decision-making chains than the highest achievements of prior best methods. Besides, the speed of LARM is 6.8x faster.
Create account to get full access
Overview
- This paper presents a Large Auto-Regressive Model (LARM) for long-horizon embodied intelligence, addressing the challenges of learning general, task-agnostic behaviors from large-scale data.
- LARM aims to learn policies that can solve a wide range of tasks by leveraging the broad knowledge and reasoning capabilities of large language models.
- The model is trained on a diverse corpus of web data to acquire general skills and then fine-tuned on embodied environments to develop task-specific capabilities.
Plain English Explanation
The researchers have developed a large language model, called LARM, that can learn to perform a wide variety of tasks in virtual environments. Unlike specialized models that are trained for specific tasks, LARM is designed to be a more general-purpose agent that can adapt to different situations.
The key idea is to first train LARM on a vast amount of online data, which gives it broad knowledge and the ability to understand language and reason about the world. Then, the model is further trained on simulated environments, where it can learn to apply its skills to complete various tasks, such as navigating through a room, interacting with objects, or following instructions.
This approach aims to create an AI system that is versatile and can handle a range of challenges, rather than being limited to a narrow set of pre-defined tasks. By leveraging the power of large language models, the researchers hope to enable embodied AI agents that can be more flexible and adaptable in real-world situations.
Technical Explanation
The paper introduces the LARM: Large Auto-Regressive Model for Long-Horizon Embodied Intelligence framework, which builds on the success of large language models as generalizable policies for embodied intelligence and the use of large language models for automatic computer-assisted tasks.
The key components of LARM include:
- Pre-training on a large corpus of web data to acquire broad knowledge and general reasoning capabilities.
- Fine-tuning the model on embodied environments to develop task-specific skills and policies.
- Leveraging the autoregressive nature of the model to generate long-horizon plans and behaviors.
The paper presents experiments in a range of simulated environments, demonstrating LARM's ability to outperform specialized models on various tasks. The model's success is attributed to its capacity to rethink the usability and cognitive behaviors enabled by large language models and to leverage the multi-modal nature of large language models for embodied intelligence.
Critical Analysis
The paper presents a promising approach to developing versatile and adaptable embodied AI agents. However, some potential limitations and areas for further research are worth considering:
-
The extent to which LARM can truly generalize to novel, unseen tasks and environments remains to be fully explored. Additional studies may be needed to assess the model's flexibility and generalization capabilities.
-
The paper does not delve deeply into the interpretability and transparency of LARM's decision-making process. As these AI systems become more complex, understanding their inner workings and the rationale behind their actions is an important area for future research.
-
The computational and memory requirements of such large-scale models may limit their practical deployment, especially in resource-constrained environments. Investigating more efficient architectures or training approaches could help address this challenge.
-
The ethical implications of developing powerful, general-purpose embodied AI agents must be carefully considered, particularly regarding issues of safety, alignment, and potential misuse.
Conclusion
The LARM: Large Auto-Regressive Model for Long-Horizon Embodied Intelligence paper presents a novel approach to creating versatile and adaptable embodied AI agents. By leveraging the broad knowledge and reasoning capabilities of large language models, the researchers aim to enable AI systems that can tackle a wide range of tasks and adapt to various environments.
While the results are promising, further research is needed to address the potential limitations and ensure the safe and responsible development of these powerful AI systems. As the field of embodied intelligence continues to evolve, the insights and techniques presented in this paper could have significant implications for the future of AI and its real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
Large Language Models as Generalizable Policies for Embodied Tasks
Andrew Szot, Max Schwarzer, Harsh Agrawal, Bogdan Mazoure, Walter Talbott, Katherine Metcalf, Natalie Mackraz, Devon Hjelm, Alexander Toshev
0
0
We show that large language models (LLMs) can be adapted to be generalizable policies for embodied visual tasks. Our approach, called Large LAnguage model Reinforcement Learning Policy (LLaRP), adapts a pre-trained frozen LLM to take as input text instructions and visual egocentric observations and output actions directly in the environment. Using reinforcement learning, we train LLaRP to see and act solely through environmental interactions. We show that LLaRP is robust to complex paraphrasings of task instructions and can generalize to new tasks that require novel optimal behavior. In particular, on 1,000 unseen tasks it achieves 42% success rate, 1.7x the success rate of other common learned baselines or zero-shot applications of LLMs. Finally, to aid the community in studying language conditioned, massively multi-task, embodied AI problems we release a novel benchmark, Language Rearrangement, consisting of 150,000 training and 1,000 testing tasks for language-conditioned rearrangement. Video examples of LLaRP in unseen Language Rearrangement instructions are at https://llm-rl.github.io.
4/17/2024
💬
Large Language Model as a Policy Teacher for Training Reinforcement Learning Agents
Zihao Zhou, Bin Hu, Chenyang Zhao, Pu Zhang, Bin Liu
0
0
Recent studies have uncovered the potential of Large Language Models (LLMs) in addressing complex sequential decision-making tasks through the provision of high-level instructions. However, LLM-based agents lack specialization in tackling specific target problems, particularly in real-time dynamic environments. Additionally, deploying an LLM-based agent in practical scenarios can be both costly and time-consuming. On the other hand, reinforcement learning (RL) approaches train agents that specialize in the target task but often suffer from low sampling efficiency and high exploration costs. In this paper, we introduce a novel framework that addresses these challenges by training a smaller, specialized student RL agent using instructions from an LLM-based teacher agent. By incorporating the guidance from the teacher agent, the student agent can distill the prior knowledge of the LLM into its own model. Consequently, the student agent can be trained with significantly less data. Moreover, through further training with environment feedback, the student agent surpasses the capabilities of its teacher for completing the target task. We conducted experiments on challenging MiniGrid and Habitat environments, specifically designed for embodied AI research, to evaluate the effectiveness of our framework. The results clearly demonstrate that our approach achieves superior performance compared to strong baseline methods. Our code is available at https://github.com/ZJLAB-AMMI/LLM4Teach.
4/23/2024
L2MAC: Large Language Model Automatic Computer for Extensive Code Generation
Samuel Holt, Max Ruiz Luyten, Mihaela van der Schaar
0
0
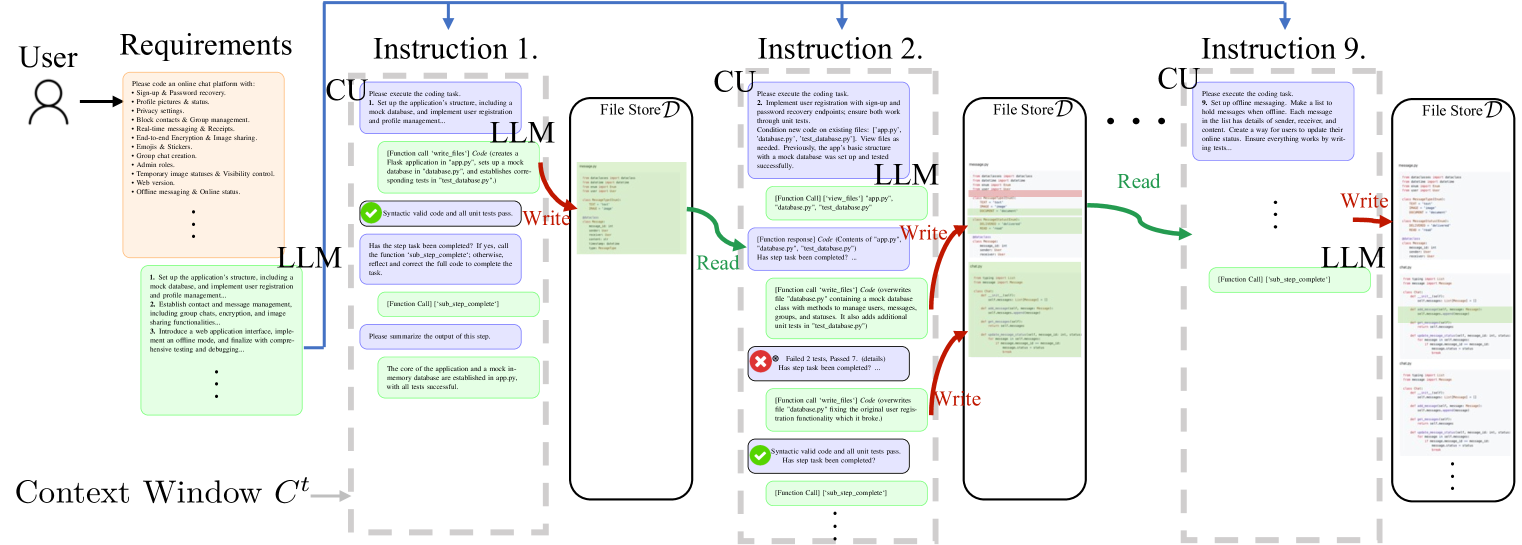
Transformer-based large language models (LLMs) are constrained by the fixed context window of the underlying transformer architecture, hindering their ability to produce long and coherent outputs. Memory-augmented LLMs are a promising solution, but current approaches cannot handle long output generation tasks since they (1) only focus on reading memory and reduce its evolution to the concatenation of new memories or (2) use very specialized memories that cannot adapt to other domains. This paper presents L2MAC, the first practical LLM-based general-purpose stored-program automatic computer (von Neumann architecture) framework, an LLM-based multi-agent system, for long and consistent output generation. Its memory has two components: the instruction registry, which is populated with a prompt program to solve the user-given task, and a file store, which will contain the final and intermediate outputs. Each instruction in turn is executed by a separate LLM agent, whose context is managed by a control unit capable of precise memory reading and writing to ensure effective interaction with the file store. These components enable L2MAC to generate extensive outputs, bypassing the constraints of the finite context window while producing outputs that fulfill a complex user-specified task. We empirically demonstrate that L2MAC achieves state-of-the-art performance in generating large codebases for system design tasks, significantly outperforming other coding methods in implementing the detailed user-specified task; we show that L2MAC works for general-purpose extensive text-based tasks, such as writing an entire book; and we provide valuable insights into L2MAC's performance improvement over existing methods.
4/11/2024
LaMI: Large Language Models for Multi-Modal Human-Robot Interaction
Chao Wang, Stephan Hasler, Daniel Tanneberg, Felix Ocker, Frank Joublin, Antonello Ceravola, Joerg Deigmoeller, Michael Gienger
0
0
This paper presents an innovative large language model (LLM)-based robotic system for enhancing multi-modal human-robot interaction (HRI). Traditional HRI systems relied on complex designs for intent estimation, reasoning, and behavior generation, which were resource-intensive. In contrast, our system empowers researchers and practitioners to regulate robot behavior through three key aspects: providing high-level linguistic guidance, creating atomic actions and expressions the robot can use, and offering a set of examples. Implemented on a physical robot, it demonstrates proficiency in adapting to multi-modal inputs and determining the appropriate manner of action to assist humans with its arms, following researchers' defined guidelines. Simultaneously, it coordinates the robot's lid, neck, and ear movements with speech output to produce dynamic, multi-modal expressions. This showcases the system's potential to revolutionize HRI by shifting from conventional, manual state-and-flow design methods to an intuitive, guidance-based, and example-driven approach. Supplementary material can be found at https://hri-eu.github.io/Lami/
4/12/2024