Through the Clutter: Exploring the Impact of Complex Environments on the Legibility of Robot Motion

0

Sign in to get full access
Overview
- This paper explores the impact of complex environments on the legibility of robot motion, which is the ability for humans to understand and anticipate a robot's actions.
- The researchers conducted experiments to assess how clutter and environmental complexity affect a human's ability to comprehend and predict a robot's movements.
- The findings provide insights into designing more intuitive and legible robot behaviors, especially for robots operating in crowded or cluttered spaces.
Plain English Explanation
When a robot moves around, it's important for humans to be able to understand and predict what the robot is going to do. This is called the "legibility" of the robot's motion. If a robot's movements are hard to read, it can be confusing and even unsafe for people interacting with the robot.
In this study, the researchers looked at how the complexity of the environment affects the legibility of a robot's movements. They conducted experiments where people watched a robot navigate through environments with varying levels of clutter and visual complexity. The goal was to see how well the human participants could understand and anticipate the robot's actions in these different settings.
The findings suggest that as the environment becomes more cluttered and visually complex, it becomes harder for people to follow and predict the robot's behavior. This is an important consideration for designing robots that need to operate in busy, crowded spaces, like service robots or assistive robots. By understanding how environmental complexity affects legibility, researchers can work on developing robot motion planning algorithms and behaviors that are more intuitive and easy for humans to understand, even in cluttered or 3D environments.
Technical Explanation
The researchers conducted a series of experiments to assess the impact of environmental complexity on the legibility of robot motion. Participants were shown videos of a robot navigating through different environments, ranging from simple, uncluttered spaces to complex, cluttered scenes. After each video, the participants were asked to predict the robot's future movements.
The results showed that as the environment became more visually complex and cluttered, participants had a harder time anticipating the robot's actions. This suggests that environmental complexity can significantly impact the legibility of robot motion, making it more challenging for humans to understand and interact with the robot.
The researchers also explored different motion planning strategies, including probabilistic trajectory planning, and found that some approaches were more legible than others, even in complex environments. This provides valuable insights for designing robot behaviors that are more intuitive and easy for humans to interpret.
Critical Analysis
The study provides important insights into the factors that influence the legibility of robot motion, but it also has some limitations. The experiments were conducted in controlled, simulated environments, and it's unclear how well the findings would translate to real-world, dynamic settings. Additionally, the study focused on visual complexity and clutter, but other environmental factors, such as lighting or acoustics, could also impact legibility.
It would be valuable for future research to explore the legibility of robot motion in more diverse and realistic scenarios, including interactive settings with humans and 3D environments. Investigating how different motion planning strategies and robot behaviors can be optimized for legibility in these complex environments would also be a fruitful area of study.
Conclusion
This paper provides valuable insights into the challenges of maintaining the legibility of robot motion in cluttered and visually complex environments. The findings highlight the importance of considering environmental factors when designing robot behaviors and motion planning algorithms, especially for robots intended to operate in busy, crowded spaces and interact with humans. By understanding the impact of environmental complexity on legibility, researchers can work towards developing more intuitive and predictable robot movements that can improve safety and facilitate better human-robot interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Through the Clutter: Exploring the Impact of Complex Environments on the Legibility of Robot Motion
Melanie Schmidt-Wolf, Tyler Becker, Denielle Oliva, Monica Nicolescu, David Feil-Seifer
The environments in which the collaboration of a robot would be the most helpful to a person are frequently uncontrolled and cluttered with many objects present. Legible robot arm motion is crucial in tasks like these in order to avoid possible collisions, improve the workflow and help ensure the safety of the person. Prior work in this area, however, focuses on solutions that are tested only in uncluttered environments and there are not many results taken from cluttered environments. In this research we present a measure for clutteredness based on an entropic measure of the environment, and a novel motion planner based on potential fields. Both our measures and the planner were tested in a cluttered environment meant to represent a more typical tool sorting task for which the person would collaborate with a robot. The in-person validation study with Baxter robots shows a significant improvement in legibility of our proposed legible motion planner compared to the current state-of-the-art legible motion planner in cluttered environments. Further, the results show a significant difference in the performance of the planners in cluttered and uncluttered environments, and the need to further explore legible motion in cluttered environments. We argue that the inconsistency of our results in cluttered environments with those obtained from uncluttered environments points out several important issues with the current research performed in the area of legible motion planners.
Read more6/4/2024

0
Legibot: Generating Legible Motions for Service Robots Using Cost-Based Local Planners
Javad Amirian, Mouad Abrini, Mohamed Chetouani
With the increasing presence of social robots in various environments and applications, there is an increasing need for these robots to exhibit socially-compliant behaviors. Legible motion, characterized by the ability of a robot to clearly and quickly convey intentions and goals to the individuals in its vicinity, through its motion, holds significant importance in this context. This will improve the overall user experience and acceptance of robots in human environments. In this paper, we introduce a novel approach to incorporate legibility into local motion planning for mobile robots. This can enable robots to generate legible motions in real-time and dynamic environments. To demonstrate the effectiveness of our proposed methodology, we also provide a robotic stack designed for deploying legibility-aware motion planning in a social robot, by integrating perception and localization components.
Read more4/9/2024
🐍
0
Sensing environmental interaction physics to traverse cluttered obstacles
Yaqing Wang, Ling Xu, Chen Li
When legged robots physically interact with obstacles in applications such as search and rescue through rubble and planetary exploration across Martain rocks, even the most advanced ones struggle because they lack a fundamental framework to model the robot-obstacle physical interaction paralleling artificial potential fields for obstacle avoidance. To remedy this, recent studies established a novel framework - potential energy landscape modeling - that explains and predicts the destabilizing transitions across locomotor modes from the physical interaction between robots and obstacles, and governs a wide range of complex locomotion. However, this framework was confined to the laboratory because we lack methods to obtain the potential energy landscape in unknown environments. Here, we explore the feasibility of introducing this framework to such environments. We showed that a robot can reconstruct the potential energy landscape for unknown obstacles by measuring the obstacle contact forces and resulting torques. To elaborate, we developed a minimalistic robot capable of sensing contact forces and torques when propelled against a pair of grass-like obstacles. Despite the forces and torques not being fully conservative, they well-matched the potential energy landscape gradients, and the reconstructed landscape well-matched ground truth. In addition, we found that using normal forces and torques and head oscillation inspired by cockroach observations further improved the estimation of conservative ones. Our study will finally inspire free-running robots to achieve low-effort, zero-shot traversing clustered, large obstacles in real-world applications by sampling contact forces and torques and reconstructing the landscape around its neighboring states in real time.
Read more8/27/2024
0
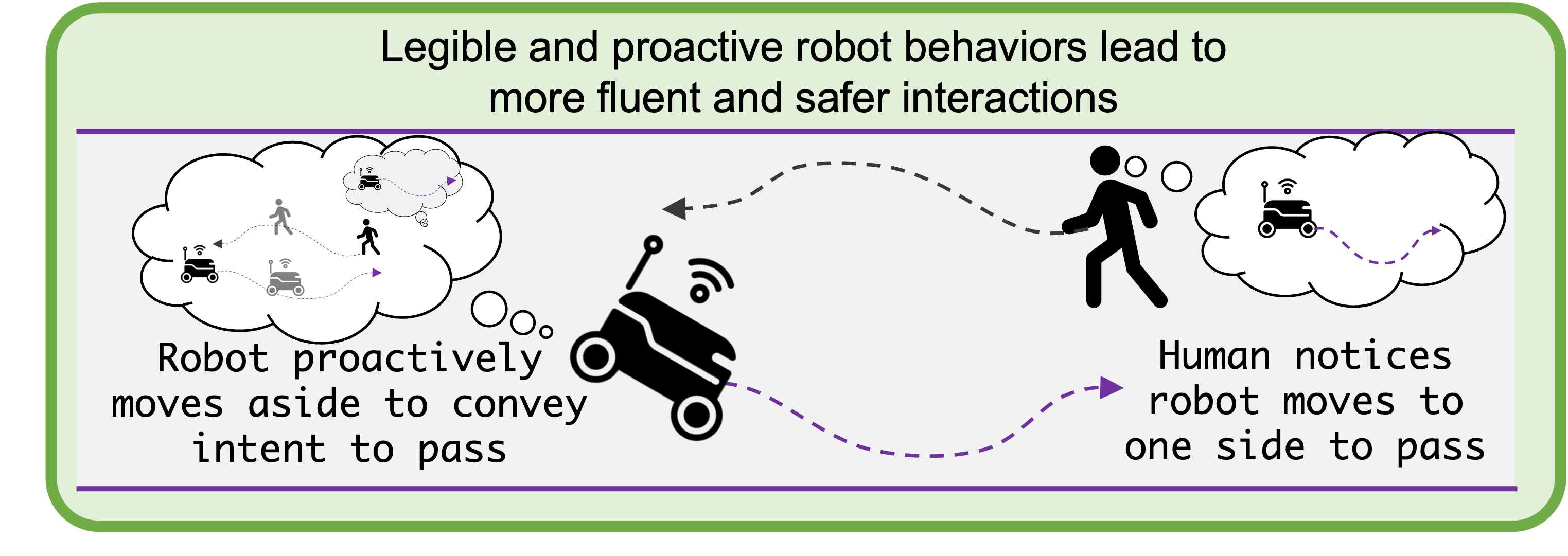
Legible and Proactive Robot Planning for Prosocial Human-Robot Interactions
Jasper Geldenbott, Karen Leung
Humans have a remarkable ability to fluently engage in joint collision avoidance in crowded navigation tasks despite the complexities and uncertainties inherent in human behavior. Underlying these interactions is a mutual understanding that (i) individuals are prosocial, that is, there is equitable responsibility in avoiding collisions, and (ii) individuals should behave legibly, that is, move in a way that clearly conveys their intent to reduce ambiguity in how they intend to avoid others. Toward building robots that can safely and seamlessly interact with humans, we propose a general robot trajectory planning framework for synthesizing legible and proactive behaviors and demonstrate that our robot planner naturally leads to prosocial interactions. Specifically, we introduce the notion of a markup factor to incentivize legible and proactive behaviors and an inconvenience budget constraint to ensure equitable collision avoidance responsibility. We evaluate our approach against well-established multi-agent planning algorithms and show that using our approach produces safe, fluent, and prosocial interactions. We demonstrate the real-time feasibility of our approach with human-in-the-loop simulations. Project page can be found at https://uw-ctrl.github.io/phri/.
Read more4/8/2024