LiCROcc: Teach Radar for Accurate Semantic Occupancy Prediction using LiDAR and Camera

0

Sign in to get full access
Overview
- This paper introduces LiCROcc, a model that uses LiDAR and camera data to accurately predict semantic occupancy in the 3D environment.
- LiCROcc employs a novel knowledge distillation approach to transfer the semantic prediction capabilities of a teacher model to a smaller radar-based student model.
- The radar-based student model can then be deployed on resource-constrained platforms for efficient 3D semantic occupancy prediction.
Plain English Explanation
LiCROcc: Teach Radar for Accurate Semantic Occupancy Prediction using LiDAR and Camera
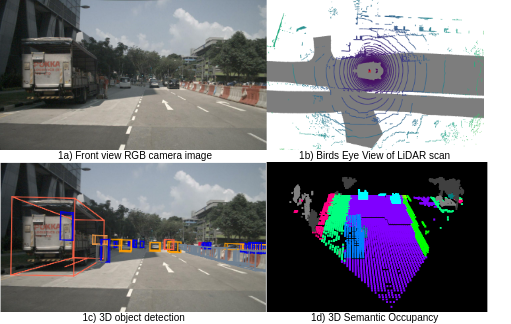
LiCROcc is a system that uses data from LiDAR (laser-based) sensors and cameras to accurately predict the semantic occupancy of a 3D environment. Semantic occupancy means identifying what types of objects (like cars, pedestrians, buildings, etc.) are present in the 3D space.
The key innovation in LiCROcc is how it trains a smaller, radar-based model to match the performance of a more powerful teacher model that uses LiDAR and camera data. This "knowledge distillation" approach allows the radar-based model to benefit from the semantic prediction capabilities of the teacher, while being more efficient and easier to deploy on resource-constrained platforms like self-driving cars or drones.
By using both LiDAR and camera data, LiCROcc is able to achieve highly accurate 3D semantic occupancy prediction, which is crucial for applications like autonomous navigation, robotic mapping, and augmented reality.
Technical Explanation
LiCROcc: Teach Radar for Accurate Semantic Occupancy Prediction using LiDAR and Camera
LiCROcc is a sensor fusion model that combines LiDAR and camera data to perform 3D semantic occupancy prediction. The system consists of a teacher model that uses the richer LiDAR and camera inputs, and a student model that is trained to mimic the teacher's predictions using only radar data.
The teacher model employs a multi-task learning framework to jointly predict semantic segmentation, instance segmentation, and occupancy from the LiDAR and camera inputs. The student model has a similar architecture but is designed to be more lightweight and efficient, using only radar data as input.
The key innovation in LiCROcc is the knowledge distillation process, where the student model is trained to match the outputs of the teacher model. This allows the student to benefit from the semantic prediction capabilities of the teacher, while being more suitable for deployment on resource-constrained platforms.
The authors evaluate LiCROcc on several benchmark datasets and demonstrate that the radar-based student model can achieve near-parity with the teacher model in terms of 3D semantic occupancy prediction accuracy, while being significantly more efficient.
Critical Analysis
LiCROcc: Teach Radar for Accurate Semantic Occupancy Prediction using LiDAR and Camera
One potential limitation of the LiCROcc approach is the reliance on the availability of high-quality LiDAR and camera data for training the teacher model. In real-world scenarios, sensor data may be noisy, incomplete, or subject to environmental conditions that degrade performance. The authors do not address how LiCROcc would handle such challenging sensor inputs.
Additionally, the paper does not provide a detailed analysis of the computational and memory footprint of the student model, which is an important consideration for deployment on resource-constrained platforms. The authors only mention that the student model is "more lightweight and efficient" than the teacher, but do not quantify the improvements.
Further research could explore ways to make the LiCROcc framework more robust to imperfect sensor data, as well as investigate techniques to further optimize the student model's efficiency without sacrificing too much accuracy.
Conclusion
LiCROcc: Teach Radar for Accurate Semantic Occupancy Prediction using LiDAR and Camera
LiCROcc presents a novel approach to 3D semantic occupancy prediction that leverages the strengths of both LiDAR and camera sensors. By employing a knowledge distillation technique, LiCROcc is able to train a radar-based student model to match the performance of a more powerful teacher model, enabling efficient deployment on resource-constrained platforms.
The ability to accurately predict the semantic occupancy of a 3D environment is crucial for a wide range of applications, including autonomous navigation, robotic mapping, and augmented reality. LiCROcc's innovative approach to sensor fusion and model optimization makes it a promising solution for these important real-world challenges.
LiCROcc: Teach Radar for Accurate Semantic Occupancy Prediction using LiDAR and Camera
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LiCROcc: Teach Radar for Accurate Semantic Occupancy Prediction using LiDAR and Camera
Yukai Ma, Jianbiao Mei, Xuemeng Yang, Licheng Wen, Weihua Xu, Jiangning Zhang, Botian Shi, Yong Liu, Xingxing Zuo
Semantic Scene Completion (SSC) is pivotal in autonomous driving perception, frequently confronted with the complexities of weather and illumination changes. The long-term strategy involves fusing multi-modal information to bolster the system's robustness. Radar, increasingly utilized for 3D target detection, is gradually replacing LiDAR in autonomous driving applications, offering a robust sensing alternative. In this paper, we focus on the potential of 3D radar in semantic scene completion, pioneering cross-modal refinement techniques for improved robustness against weather and illumination changes, and enhancing SSC performance.Regarding model architecture, we propose a three-stage tight fusion approach on BEV to realize a fusion framework for point clouds and images. Based on this foundation, we designed three cross-modal distillation modules-CMRD, BRD, and PDD. Our approach enhances the performance in both radar-only (R-LiCROcc) and radar-camera (RC-LiCROcc) settings by distilling to them the rich semantic and structural information of the fused features of LiDAR and camera. Finally, our LC-Fusion (teacher model), R-LiCROcc and RC-LiCROcc achieve the best performance on the nuScenes-Occupancy dataset, with mIOU exceeding the baseline by 22.9%, 44.1%, and 15.5%, respectively. The project page is available at https://hr-zju.github.io/LiCROcc/.
Read more7/24/2024
🔮
0
RadarOcc: Robust 3D Occupancy Prediction with 4D Imaging Radar
Fangqiang Ding, Xiangyu Wen, Lawrence Zhu, Yiming Li, Chris Xiaoxuan Lu
3D occupancy-based perception pipeline has significantly advanced autonomous driving by capturing detailed scene descriptions and demonstrating strong generalizability across various object categories and shapes. Current methods predominantly rely on LiDAR or camera inputs for 3D occupancy prediction. These methods are susceptible to adverse weather conditions, limiting the all-weather deployment of self-driving cars. To improve perception robustness, we leverage the recent advances in automotive radars and introduce a novel approach that utilizes 4D imaging radar sensors for 3D occupancy prediction. Our method, RadarOcc, circumvents the limitations of sparse radar point clouds by directly processing the 4D radar tensor, thus preserving essential scene details. RadarOcc innovatively addresses the challenges associated with the voluminous and noisy 4D radar data by employing Doppler bins descriptors, sidelobe-aware spatial sparsification, and range-wise self-attention mechanisms. To minimize the interpolation errors associated with direct coordinate transformations, we also devise a spherical-based feature encoding followed by spherical-to-Cartesian feature aggregation. We benchmark various baseline methods based on distinct modalities on the public K-Radar dataset. The results demonstrate RadarOcc's state-of-the-art performance in radar-based 3D occupancy prediction and promising results even when compared with LiDAR- or camera-based methods. Additionally, we present qualitative evidence of the superior performance of 4D radar in adverse weather conditions and explore the impact of key pipeline components through ablation studies.
Read more6/14/2024
0
Real-time 3D semantic occupancy prediction for autonomous vehicles using memory-efficient sparse convolution
Samuel Sze, Lars Kunze
In autonomous vehicles, understanding the surrounding 3D environment of the ego vehicle in real-time is essential. A compact way to represent scenes while encoding geometric distances and semantic object information is via 3D semantic occupancy maps. State of the art 3D mapping methods leverage transformers with cross-attention mechanisms to elevate 2D vision-centric camera features into the 3D domain. However, these methods encounter significant challenges in real-time applications due to their high computational demands during inference. This limitation is particularly problematic in autonomous vehicles, where GPU resources must be shared with other tasks such as localization and planning. In this paper, we introduce an approach that extracts features from front-view 2D camera images and LiDAR scans, then employs a sparse convolution network (Minkowski Engine), for 3D semantic occupancy prediction. Given that outdoor scenes in autonomous driving scenarios are inherently sparse, the utilization of sparse convolution is particularly apt. By jointly solving the problems of 3D scene completion of sparse scenes and 3D semantic segmentation, we provide a more efficient learning framework suitable for real-time applications in autonomous vehicles. We also demonstrate competitive accuracy on the nuScenes dataset.
Read more5/21/2024
🔎
0
LEROjD: Lidar Extended Radar-Only Object Detection
Patrick Palmer, Martin Kruger, Stefan Schutte, Richard Altendorfer, Ganesh Adam, Torsten Bertram
Accurate 3D object detection is vital for automated driving. While lidar sensors are well suited for this task, they are expensive and have limitations in adverse weather conditions. 3+1D imaging radar sensors offer a cost-effective, robust alternative but face challenges due to their low resolution and high measurement noise. Existing 3+1D imaging radar datasets include radar and lidar data, enabling cross-modal model improvements. Although lidar should not be used during inference, it can aid the training of radar-only object detectors. We explore two strategies to transfer knowledge from the lidar to the radar domain and radar-only object detectors: 1. multi-stage training with sequential lidar point cloud thin-out, and 2. cross-modal knowledge distillation. In the multi-stage process, three thin-out methods are examined. Our results show significant performance gains of up to 4.2 percentage points in mean Average Precision with multi-stage training and up to 3.9 percentage points with knowledge distillation by initializing the student with the teacher's weights. The main benefit of these approaches is their applicability to other 3D object detection networks without altering their architecture, as we show by analyzing it on two different object detectors. Our code is available at https://github.com/rst-tu-dortmund/lerojd
Read more9/10/2024