LiSD: An Efficient Multi-Task Learning Framework for LiDAR Segmentation and Detection

0
Sign in to get full access
Overview
- Presents an efficient multi-task learning framework called LiSD for LiDAR-based segmentation and detection
- Demonstrates improved performance on various benchmark datasets compared to state-of-the-art methods
- Leverages a cooperative supervision mechanism to enhance feature learning and task alignment
Plain English Explanation
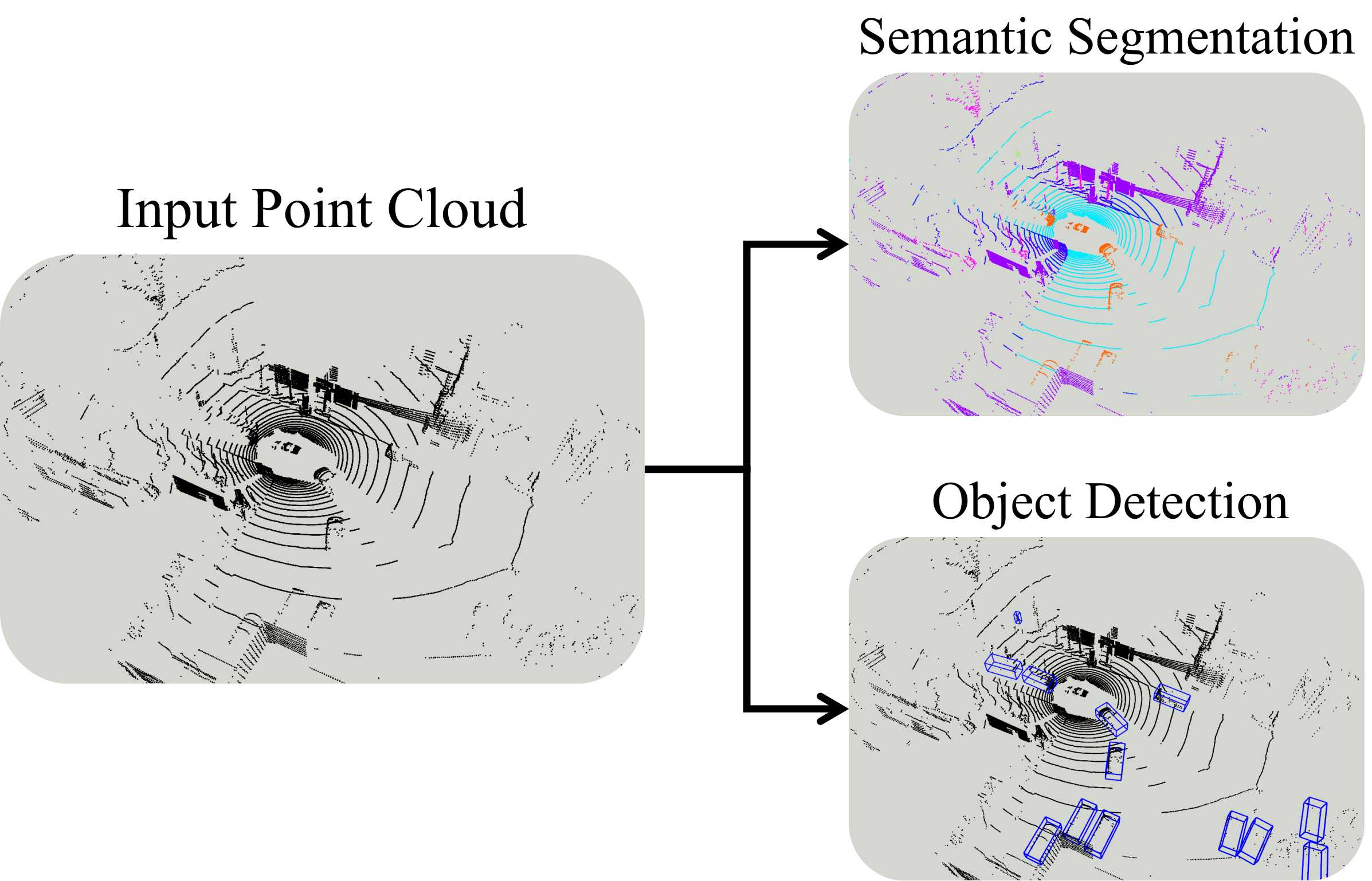
The paper introduces a new approach called LiSD, which stands for "LiDAR Segmentation and Detection". LiSD is an efficient multi-task learning framework that can perform both segmentation and detection of objects in LiDAR point cloud data. Segmentation is the process of separating different objects or regions in the data, while detection is the task of identifying and locating specific objects of interest.
The key innovation of LiSD is its use of a cooperative supervision mechanism, which helps the model learn more effective features and better align the two tasks of segmentation and detection. This allows the model to perform both tasks more accurately compared to previous approaches that treated them separately.
The authors demonstrate the effectiveness of LiSD on several benchmark datasets, showing that it outperforms state-of-the-art methods in LiDAR segmentation and detection. This suggests that the proposed multi-task learning framework can be a valuable tool for 3D scene understanding applications that rely on LiDAR data, such as autonomous driving and robotics.
Technical Explanation
The LiSD framework consists of a shared backbone network that processes the input LiDAR point cloud, and two separate task-specific heads for segmentation and detection. The backbone network is designed to extract meaningful features from the 3D data, while the task-specific heads use these features to perform the respective tasks.
A key aspect of LiSD is its cooperative supervision mechanism, which aims to improve the feature learning and task alignment. This is achieved by introducing an auxiliary task of cross-task feature matching, where the model is trained to predict the correspondence between segmentation and detection features. This encourages the model to learn representations that are useful for both tasks, leading to improved performance.
The authors also propose a novel loss function that combines the standard segmentation and detection losses with the cross-task feature matching loss. This joint optimization allows the model to learn more effective features and better align the two tasks.
The experimental results on various benchmark datasets, such as KITTI and nuScenes, demonstrate the superiority of the LiSD framework over state-of-the-art methods in both LiDAR segmentation and detection tasks.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed LiSD framework, with a comprehensive set of experiments and comparisons to existing methods. The authors have also acknowledged some limitations of their approach, such as the potential for increased computational complexity due to the additional cross-task feature matching task.
One area that could be further explored is the performance of LiSD on more diverse and challenging datasets, as the experiments were mainly conducted on commonly used benchmarks. It would be interesting to see how the framework adapts to more complex real-world scenarios with varying environmental conditions and object types.
Additionally, the authors could investigate the interpretability of the learned features and their transferability to other 3D perception tasks. Understanding the underlying representations learned by the model could provide valuable insights for improving the overall performance and generalization capabilities.
Conclusion
The LiSD framework presented in this paper represents a significant advancement in the field of 3D scene understanding using LiDAR data. By leveraging a cooperative supervision mechanism to jointly optimize segmentation and detection tasks, the model is able to learn more effective features and achieve state-of-the-art performance on benchmark datasets.
The success of LiSD highlights the potential of multi-task learning approaches for complex 3D perception problems, where the synergy between related tasks can lead to improved generalization and efficiency. The findings of this research can have important implications for applications such as autonomous driving, robotics, and urban planning, where accurate and reliable 3D scene understanding is crucial.
Overall, the LiSD framework is a promising contribution to the ongoing efforts in the 3D computer vision community, and its principles could inspire further research and development in the field of multi-task learning for 3D perception tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LiSD: An Efficient Multi-Task Learning Framework for LiDAR Segmentation and Detection
Jiahua Xu, Si Zuo, Chenfeng Wei, Wei Zhou
With the rapid proliferation of autonomous driving, there has been a heightened focus on the research of lidar-based 3D semantic segmentation and object detection methodologies, aiming to ensure the safety of traffic participants. In recent decades, learning-based approaches have emerged, demonstrating remarkable performance gains in comparison to conventional algorithms. However, the segmentation and detection tasks have traditionally been examined in isolation to achieve the best precision. To this end, we propose an efficient multi-task learning framework named LiSD which can address both segmentation and detection tasks, aiming to optimize the overall performance. Our proposed LiSD is a voxel-based encoder-decoder framework that contains a hierarchical feature collaboration module and a holistic information aggregation module. Different integration methods are adopted to keep sparsity in segmentation while densifying features for query initialization in detection. Besides, cross-task information is utilized in an instance-aware refinement module to obtain more accurate predictions. Experimental results on the nuScenes dataset and Waymo Open Dataset demonstrate the effectiveness of our proposed model. It is worth noting that LiSD achieves the state-of-the-art performance of 83.3% mIoU on the nuScenes segmentation benchmark for lidar-only methods.
Read more6/13/2024
🏋️
0
An Empirical Study of Training State-of-the-Art LiDAR Segmentation Models
Jiahao Sun, Chunmei Qing, Xiang Xu, Lingdong Kong, Youquan Liu, Li Li, Chenming Zhu, Jingwei Zhang, Zeqi Xiao, Runnan Chen, Tai Wang, Wenwei Zhang, Kai Chen
In the rapidly evolving field of autonomous driving, precise segmentation of LiDAR data is crucial for understanding complex 3D environments. Traditional approaches often rely on disparate, standalone codebases, hindering unified advancements and fair benchmarking across models. To address these challenges, we introduce MMDetection3D-lidarseg, a comprehensive toolbox designed for the efficient training and evaluation of state-of-the-art LiDAR segmentation models. We support a wide range of segmentation models and integrate advanced data augmentation techniques to enhance robustness and generalization. Additionally, the toolbox provides support for multiple leading sparse convolution backends, optimizing computational efficiency and performance. By fostering a unified framework, MMDetection3D-lidarseg streamlines development and benchmarking, setting new standards for research and application. Our extensive benchmark experiments on widely-used datasets demonstrate the effectiveness of the toolbox. The codebase and trained models have been publicly available, promoting further research and innovation in the field of LiDAR segmentation for autonomous driving.
Read more5/31/2024

0
Multi-Modal Data-Efficient 3D Scene Understanding for Autonomous Driving
Lingdong Kong, Xiang Xu, Jiawei Ren, Wenwei Zhang, Liang Pan, Kai Chen, Wei Tsang Ooi, Ziwei Liu
Efficient data utilization is crucial for advancing 3D scene understanding in autonomous driving, where reliance on heavily human-annotated LiDAR point clouds challenges fully supervised methods. Addressing this, our study extends into semi-supervised learning for LiDAR semantic segmentation, leveraging the intrinsic spatial priors of driving scenes and multi-sensor complements to augment the efficacy of unlabeled datasets. We introduce LaserMix++, an evolved framework that integrates laser beam manipulations from disparate LiDAR scans and incorporates LiDAR-camera correspondences to further assist data-efficient learning. Our framework is tailored to enhance 3D scene consistency regularization by incorporating multi-modality, including 1) multi-modal LaserMix operation for fine-grained cross-sensor interactions; 2) camera-to-LiDAR feature distillation that enhances LiDAR feature learning; and 3) language-driven knowledge guidance generating auxiliary supervisions using open-vocabulary models. The versatility of LaserMix++ enables applications across LiDAR representations, establishing it as a universally applicable solution. Our framework is rigorously validated through theoretical analysis and extensive experiments on popular driving perception datasets. Results demonstrate that LaserMix++ markedly outperforms fully supervised alternatives, achieving comparable accuracy with five times fewer annotations and significantly improving the supervised-only baselines. This substantial advancement underscores the potential of semi-supervised approaches in reducing the reliance on extensive labeled data in LiDAR-based 3D scene understanding systems.
Read more5/9/2024

0
UdeerLID+: Integrating LiDAR, Image, and Relative Depth with Semi-Supervised
Tao Ni, Xin Zhan, Tao Luo, Wenbin Liu, Zhan Shi, JunBo Chen
Road segmentation is a critical task for autonomous driving systems, requiring accurate and robust methods to classify road surfaces from various environmental data. Our work introduces an innovative approach that integrates LiDAR point cloud data, visual image, and relative depth maps derived from images. The integration of multiple data sources in road segmentation presents both opportunities and challenges. One of the primary challenges is the scarcity of large-scale, accurately labeled datasets that are necessary for training robust deep learning models. To address this, we have developed the [UdeerLID+] framework under a semi-supervised learning paradigm. Experiments results on KITTI datasets validate the superior performance.
Read more9/11/2024