LLaRA: Supercharging Robot Learning Data for Vision-Language Policy

0
Sign in to get full access
Overview
- This paper introduces LLaRA, a framework for "supercharging" robot learning data by leveraging large language models and vision-language models.
- LLaRA aims to enhance the performance of vision-language policy models used in robotic systems, which control a robot's actions based on visual inputs and language instructions.
- The authors demonstrate how LLaRA can boost the performance of existing vision-language models like LAVA and OpenVLA, as well as enable generalized policy learning from language instructions.
Plain English Explanation
The paper presents a new framework called LLaRA that helps improve the performance of robotic systems that use vision and language understanding to control the robot's actions. These systems, known as vision-language policy models, need extensive training data to learn how to interpret visual inputs and language instructions in order to perform tasks.
LLaRA leverages large language models and vision-language models - powerful AI systems that can understand and generate human language and relate it to visual information. By integrating these models into the training process, LLaRA can "supercharge" the robot's learning, allowing it to learn more effectively from less data.
This could be particularly useful for robotic applications like natural language-driven assembly or quadruped navigation, where the robot needs to interpret complex language instructions and match them to the appropriate visual cues and actions. LLaRA aims to make these systems more capable and efficient.
Technical Explanation
The core idea behind LLaRA is to leverage large language models and vision-language models to enhance the training process for vision-language policy models used in robotics. These policy models control a robot's actions based on visual inputs and language instructions.
LLaRA introduces several key components:
-
Language Model Pretraining: The authors pretrain a large language model on a diverse corpus of text data to imbue the model with strong language understanding capabilities.
-
Vision-Language Finetuning: They then finetune the language model on a vision-language dataset, allowing the model to learn how to relate visual information to language.
-
Policy Learning: Finally, the vision-language model is integrated into the training process for the vision-language policy model, acting as a powerful feature extractor and reasoning engine.
The authors demonstrate how LLaRA can boost the performance of existing vision-language policy models like LAVA and OpenVLA. They also show how LLaRA enables generalized policy learning from language instructions, allowing the robot to learn complex tasks from natural language alone.
Critical Analysis
The paper provides a compelling approach to enhancing robot learning by leveraging large language models and vision-language models. However, the authors acknowledge several limitations and areas for future work:
- The effectiveness of LLaRA may depend on the specific characteristics of the target robotic task and the available training data. Further research is needed to understand its generalizability.
- The integration of the language and vision-language models into the policy learning process is not trivial and may require careful design choices.
- While LLaRA demonstrates improved performance, the authors do not provide a detailed analysis of the model's failure modes or edge cases.
Additionally, one could question whether the reliance on large, pre-trained models introduces new challenges in terms of computational resources, energy consumption, and potential biases present in the original training data.
Overall, the LLaRA framework represents an interesting and promising direction for enhancing robot learning, but further research and validation will be needed to fully understand its strengths, limitations, and practical implications.
Conclusion
The LLaRA framework presented in this paper offers a novel approach to supercharging robot learning data by leveraging large language models and vision-language models. By integrating these powerful AI components into the training process for vision-language policy models, the authors demonstrate how robot systems can learn more effectively from less data, potentially unlocking new capabilities in areas like natural language-driven assembly or quadruped navigation.
While LLaRA shows promising results, the authors acknowledge several limitations that warrant further investigation. Nonetheless, this work represents an important step towards more efficient and capable robotic systems that can better interpret and act upon complex language instructions and visual cues.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LLaRA: Supercharging Robot Learning Data for Vision-Language Policy
Xiang Li, Cristina Mata, Jongwoo Park, Kumara Kahatapitiya, Yoo Sung Jang, Jinghuan Shang, Kanchana Ranasinghe, Ryan Burgert, Mu Cai, Yong Jae Lee, Michael S. Ryoo
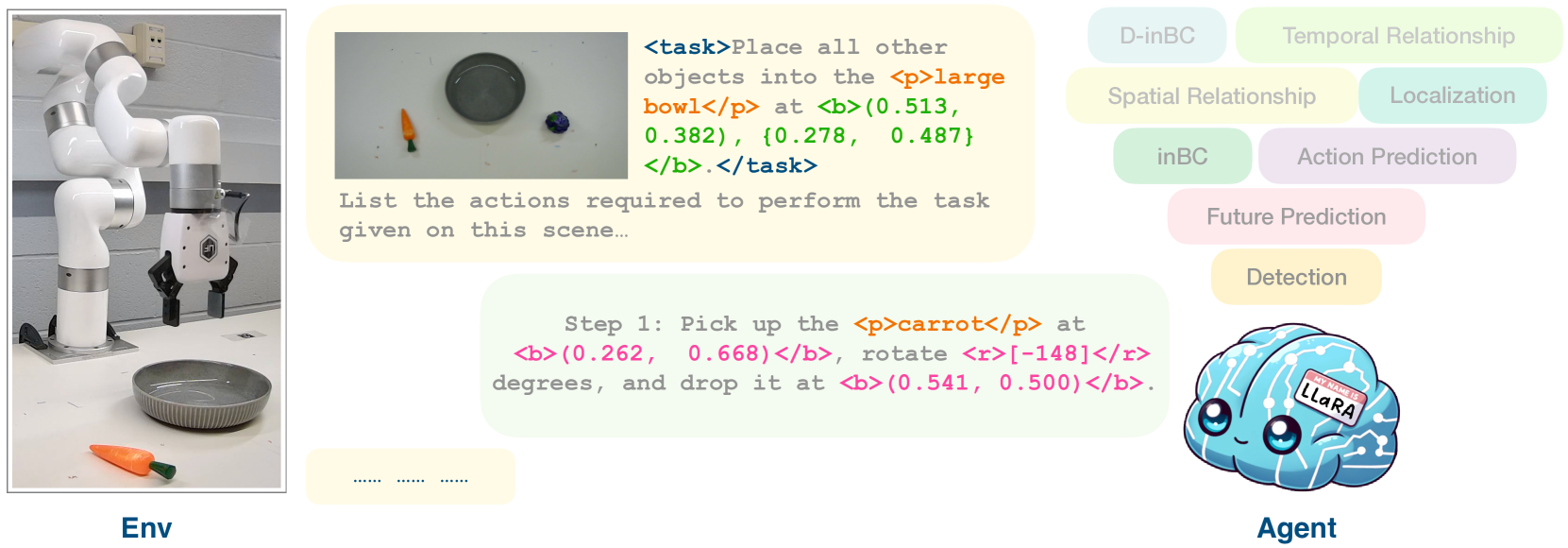
Large Language Models (LLMs) equipped with extensive world knowledge and strong reasoning skills can tackle diverse tasks across domains, often by posing them as conversation-style instruction-response pairs. In this paper, we propose LLaRA: Large Language and Robotics Assistant, a framework which formulates robot action policy as conversations, and provides improved responses when trained with auxiliary data that complements policy learning. LLMs with visual inputs, i.e., Vision Language Models (VLMs), have the capacity to process state information as visual-textual prompts and generate optimal policy decisions in text. To train such action policy VLMs, we first introduce an automated pipeline to generate diverse high-quality robotics instruction data from existing behavior cloning data. A VLM finetuned with the resulting collection of datasets based on a conversation-style formulation tailored for robotics tasks, can generate meaningful robot action policy decisions. Our experiments across multiple simulated and real-world environments demonstrate the state-of-the-art performance of the proposed LLaRA framework. The code, datasets, and pretrained models are available at https://github.com/LostXine/LLaRA.
Read more7/1/2024

0
LLARVA: Vision-Action Instruction Tuning Enhances Robot Learning
Dantong Niu, Yuvan Sharma, Giscard Biamby, Jerome Quenum, Yutong Bai, Baifeng Shi, Trevor Darrell, Roei Herzig
In recent years, instruction-tuned Large Multimodal Models (LMMs) have been successful at several tasks, including image captioning and visual question answering; yet leveraging these models remains an open question for robotics. Prior LMMs for robotics applications have been extensively trained on language and action data, but their ability to generalize in different settings has often been less than desired. To address this, we introduce LLARVA, a model trained with a novel instruction tuning method that leverages structured prompts to unify a range of robotic learning tasks, scenarios, and environments. Additionally, we show that predicting intermediate 2-D representations, which we refer to as visual traces, can help further align vision and action spaces for robot learning. We generate 8.5M image-visual trace pairs from the Open X-Embodiment dataset in order to pre-train our model, and we evaluate on 12 different tasks in the RLBench simulator as well as a physical Franka Emika Panda 7-DoF robot. Our experiments yield strong performance, demonstrating that LLARVA - using 2-D and language representations - performs well compared to several contemporary baselines, and can generalize across various robot environments and configurations.
Read more6/18/2024
0
OpenVLA: An Open-Source Vision-Language-Action Model
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, Quan Vuong, Thomas Kollar, Benjamin Burchfiel, Russ Tedrake, Dorsa Sadigh, Sergey Levine, Percy Liang, Chelsea Finn
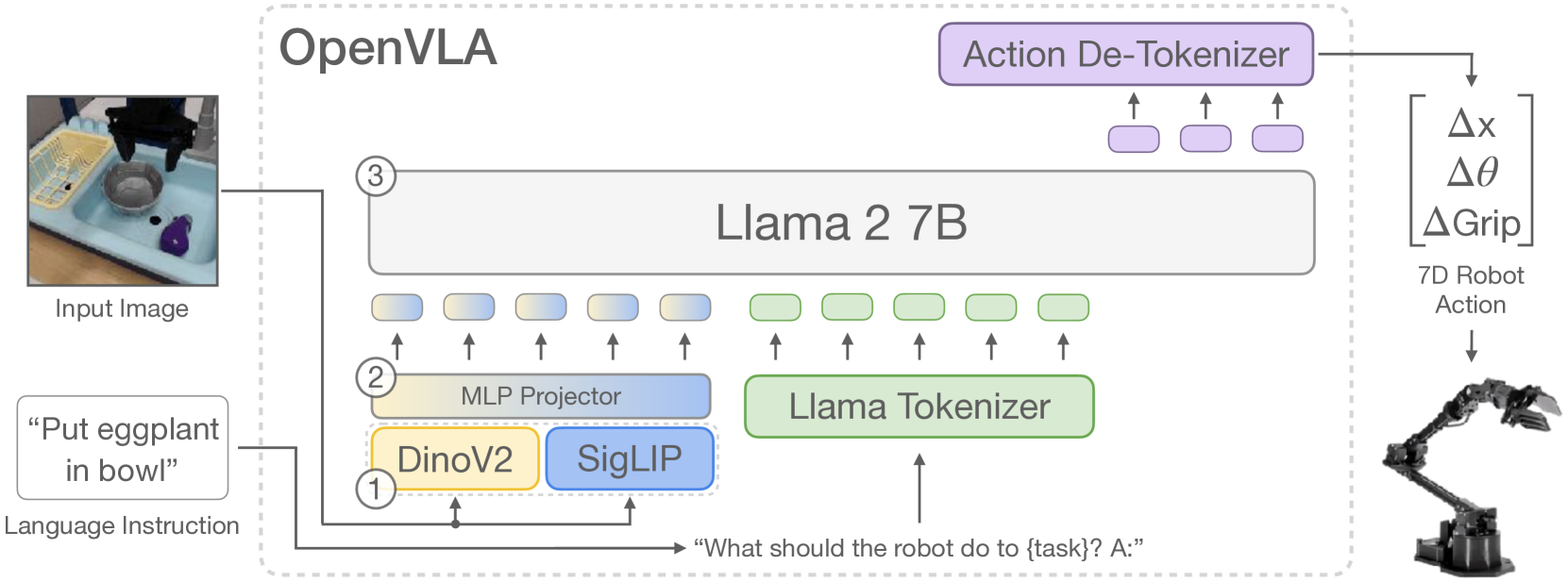
Large policies pretrained on a combination of Internet-scale vision-language data and diverse robot demonstrations have the potential to change how we teach robots new skills: rather than training new behaviors from scratch, we can fine-tune such vision-language-action (VLA) models to obtain robust, generalizable policies for visuomotor control. Yet, widespread adoption of VLAs for robotics has been challenging as 1) existing VLAs are largely closed and inaccessible to the public, and 2) prior work fails to explore methods for efficiently fine-tuning VLAs for new tasks, a key component for adoption. Addressing these challenges, we introduce OpenVLA, a 7B-parameter open-source VLA trained on a diverse collection of 970k real-world robot demonstrations. OpenVLA builds on a Llama 2 language model combined with a visual encoder that fuses pretrained features from DINOv2 and SigLIP. As a product of the added data diversity and new model components, OpenVLA demonstrates strong results for generalist manipulation, outperforming closed models such as RT-2-X (55B) by 16.5% in absolute task success rate across 29 tasks and multiple robot embodiments, with 7x fewer parameters. We further show that we can effectively fine-tune OpenVLA for new settings, with especially strong generalization results in multi-task environments involving multiple objects and strong language grounding abilities, and outperform expressive from-scratch imitation learning methods such as Diffusion Policy by 20.4%. We also explore compute efficiency; as a separate contribution, we show that OpenVLA can be fine-tuned on consumer GPUs via modern low-rank adaptation methods and served efficiently via quantization without a hit to downstream success rate. Finally, we release model checkpoints, fine-tuning notebooks, and our PyTorch codebase with built-in support for training VLAs at scale on Open X-Embodiment datasets.
Read more9/9/2024
💬
0
Large Language Models as Generalizable Policies for Embodied Tasks
Andrew Szot, Max Schwarzer, Harsh Agrawal, Bogdan Mazoure, Walter Talbott, Katherine Metcalf, Natalie Mackraz, Devon Hjelm, Alexander Toshev
We show that large language models (LLMs) can be adapted to be generalizable policies for embodied visual tasks. Our approach, called Large LAnguage model Reinforcement Learning Policy (LLaRP), adapts a pre-trained frozen LLM to take as input text instructions and visual egocentric observations and output actions directly in the environment. Using reinforcement learning, we train LLaRP to see and act solely through environmental interactions. We show that LLaRP is robust to complex paraphrasings of task instructions and can generalize to new tasks that require novel optimal behavior. In particular, on 1,000 unseen tasks it achieves 42% success rate, 1.7x the success rate of other common learned baselines or zero-shot applications of LLMs. Finally, to aid the community in studying language conditioned, massively multi-task, embodied AI problems we release a novel benchmark, Language Rearrangement, consisting of 150,000 training and 1,000 testing tasks for language-conditioned rearrangement. Video examples of LLaRP in unseen Language Rearrangement instructions are at https://llm-rl.github.io.
Read more4/17/2024