QUAR-VLA: Vision-Language-Action Model for Quadruped Robots
2312.14457
0
0
Abstract
The important manifestation of robot intelligence is the ability to naturally interact and autonomously make decisions. Traditional approaches to robot control often compartmentalize perception, planning, and decision-making, simplifying system design but limiting the synergy between different information streams. This compartmentalization poses challenges in achieving seamless autonomous reasoning, decision-making, and action execution. To address these limitations, a novel paradigm, named Vision-Language-Action tasks for QUAdruped Robots (QUAR-VLA), has been introduced in this paper. This approach tightly integrates visual information and instructions to generate executable actions, effectively merging perception, planning, and decision-making. The central idea is to elevate the overall intelligence of the robot. Within this framework, a notable challenge lies in aligning fine-grained instructions with visual perception information. This emphasizes the complexity involved in ensuring that the robot accurately interprets and acts upon detailed instructions in harmony with its visual observations. Consequently, we propose QUAdruped Robotic Transformer (QUART), a family of VLA models to integrate visual information and instructions from diverse modalities as input and generates executable actions for real-world robots and present QUAdruped Robot Dataset (QUARD), a large-scale multi-task dataset including navigation, complex terrain locomotion, and whole-body manipulation tasks for training QUART models. Our extensive evaluation (4000 evaluation trials) shows that our approach leads to performant robotic policies and enables QUART to obtain a range of emergent capabilities.
Create account to get full access
Overview
- Introduces a Vision-Language-Action (VLA) model for quadruped robots, called QUAR-VLA, that can perform complex tasks by integrating visual perception, language understanding, and action planning.
- Leverages recent advancements in multi-modal learning and robot control to enable quadruped robots to follow natural language instructions and reason about their physical environment.
- Tested on a variety of navigation and manipulation tasks, demonstrating the model's capability to bridge the gap between language, vision, and action.
Plain English Explanation
The paper presents a new model called QUAR-VLA that allows quadruped robots to understand and respond to natural language instructions while reasoning about their physical surroundings. This is an important capability, as it enables robots to interact with humans more naturally and carry out complex tasks that involve both perception and action.
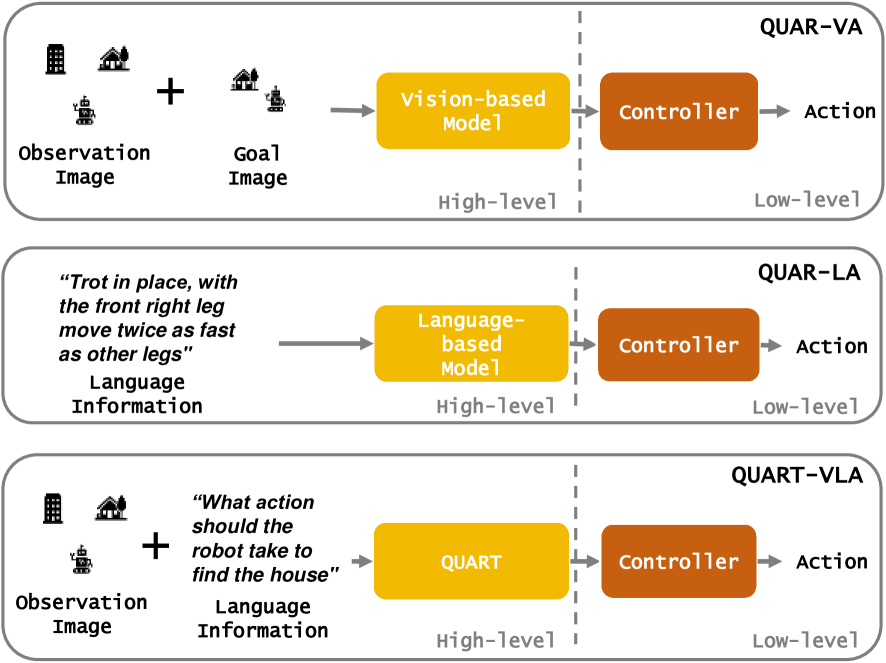
The key idea behind QUAR-VLA is to integrate three critical components: vision, language, and action. The vision component allows the robot to perceive and understand its environment through cameras. The language component allows the robot to comprehend spoken or written instructions from humans. And the action component allows the robot to plan and execute the necessary movements to carry out a task.
By bringing these three components together, the QUAR-VLA model enables the robot to follow high-level language commands, such as "go to the red ball and push it into the box," and then use its visual perception and reasoning abilities to figure out how to actually accomplish that task. This is a significant advancement over traditional robot control systems that typically require very specific, low-level instructions.
The researchers tested the QUAR-VLA model on a variety of tasks, including navigating through obstacle-filled environments and manipulating objects. The results showed that the model was able to effectively bridge the gap between language, vision, and action, allowing the quadruped robot to perform complex tasks with a high degree of success.
Overall, the QUAR-VLA model represents an important step forward in the field of robotics and multi-modal learning, bringing us closer to the vision of robots that can interact with humans in a more natural and intuitive way.
Technical Explanation
The QUAR-VLA model proposed in the paper integrates three key components: vision, language, and action. The vision component uses a convolutional neural network to process visual input from the robot's cameras, extracting relevant features about the environment. The language component uses a transformer-based language model to understand natural language instructions provided to the robot.
The key innovation of the QUAR-VLA model is the way it connects the vision and language components to the action component, which is responsible for planning and executing the robot's movements. The researchers developed a novel vision-language-action integration module that fuses the visual and linguistic representations to generate appropriate motor commands for the robot.
This integration module consists of several sub-components, including:
- A vision-language fusion module that combines the visual and linguistic representations
- A reasoning module that uses the fused representation to plan the robot's actions
- A control module that translates the planned actions into low-level motor commands
The researchers evaluated the QUAR-VLA model on a range of navigation and manipulation tasks, including following natural language instructions to reach a target location, push an object into a goal region, and navigate through cluttered environments. The results demonstrated the model's ability to effectively bridge the gap between language, vision, and action, outperforming baseline approaches that did not integrate these modalities.
Critical Analysis
The QUAR-VLA model presented in the paper represents an important step forward in the field of robot learning, but it also has some limitations and areas for further research.
One potential limitation is the reliance on a pre-trained vision model, which may limit the model's generalization to novel environments or objects. The researchers acknowledge this and suggest that further work is needed to develop more adaptive and flexible visual perception capabilities.
Additionally, the paper does not provide a detailed analysis of the model's sample efficiency or training requirements, which could be important considerations for real-world deployment on resource-constrained robotic platforms.
Another area for potential improvement is the language understanding component, which could be enhanced by incorporating more advanced natural language processing techniques, such as grounded language learning or multi-modal reasoning.
Despite these limitations, the QUAR-VLA model represents an important step forward in the field of multi-modal robot learning, demonstrating the potential for integrating language, vision, and action to enable more natural and intuitive robot-human interaction.
Conclusion
The QUAR-VLA model presented in this paper is a significant advancement in the field of quadruped robot learning, as it enables quadruped robots to understand and respond to natural language instructions while reasoning about their physical environment.
By integrating vision, language, and action components, the QUAR-VLA model allows quadruped robots to perform complex tasks that involve both perception and action, bridging the gap between high-level language commands and low-level motor control.
The successful evaluation of the QUAR-VLA model on a variety of navigation and manipulation tasks suggests that this approach could have important implications for the development of more intuitive and user-friendly robotic systems, with potential applications in areas such as assistive technology, search and rescue operations, and human-robot collaboration.
While the model has some limitations that warrant further research, the QUAR-VLA represents an important step forward in the field of multi-modal robot learning, demonstrating the potential for integrating language, vision, and action to enable more natural and effective human-robot interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
A Survey on Vision-Language-Action Models for Embodied AI
Yueen Ma, Zixing Song, Yuzheng Zhuang, Jianye Hao, Irwin King
0
0
Deep learning has demonstrated remarkable success across many domains, including computer vision, natural language processing, and reinforcement learning. Representative artificial neural networks in these fields span convolutional neural networks, Transformers, and deep Q-networks. Built upon unimodal neural networks, numerous multi-modal models have been introduced to address a range of tasks such as visual question answering, image captioning, and speech recognition. The rise of instruction-following robotic policies in embodied AI has spurred the development of a novel category of multi-modal models known as vision-language-action models (VLAs). Their multi-modality capability has become a foundational element in robot learning. Various methods have been proposed to enhance traits such as versatility, dexterity, and generalizability. Some models focus on refining specific components through pretraining. Others aim to develop control policies adept at predicting low-level actions. Certain VLAs serve as high-level task planners capable of decomposing long-horizon tasks into executable subtasks. Over the past few years, a myriad of VLAs have emerged, reflecting the rapid advancement of embodied AI. Therefore, it is imperative to capture the evolving landscape through a comprehensive survey.
5/24/2024
Bi-VLA: Vision-Language-Action Model-Based System for Bimanual Robotic Dexterous Manipulations
Koffivi Fid`ele Gbagbe, Miguel Altamirano Cabrera, Ali Alabbas, Oussama Alyunes, Artem Lykov, Dzmitry Tsetserukou
0
0
This research introduces the Bi-VLA (Vision-Language-Action) model, a novel system designed for bimanual robotic dexterous manipulations that seamlessly integrate vision, language understanding, and physical action. The system's functionality was evaluated through a set of household tasks, including the preparation of a desired salad upon human request. Bi-VLA demonstrates the ability to interpret complex human instructions, perceive and understand the visual context of ingredients, and execute precise bimanual actions to assemble the requested salad. Through a series of experiments, we evaluate the system's performance in terms of accuracy, efficiency, and adaptability to various salad recipes and human preferences. Our results indicate a high success rate of 100% in generating the correct executable code by the Language module from the user-requested tasks. The Vision Module achieved a success rate of 96.06% in detecting specific ingredients and an 83.4% success rate in detecting a list of multiple ingredients.
5/13/2024
OpenVLA: An Open-Source Vision-Language-Action Model
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, Quan Vuong, Thomas Kollar, Benjamin Burchfiel, Russ Tedrake, Dorsa Sadigh, Sergey Levine, Percy Liang, Chelsea Finn
0
0
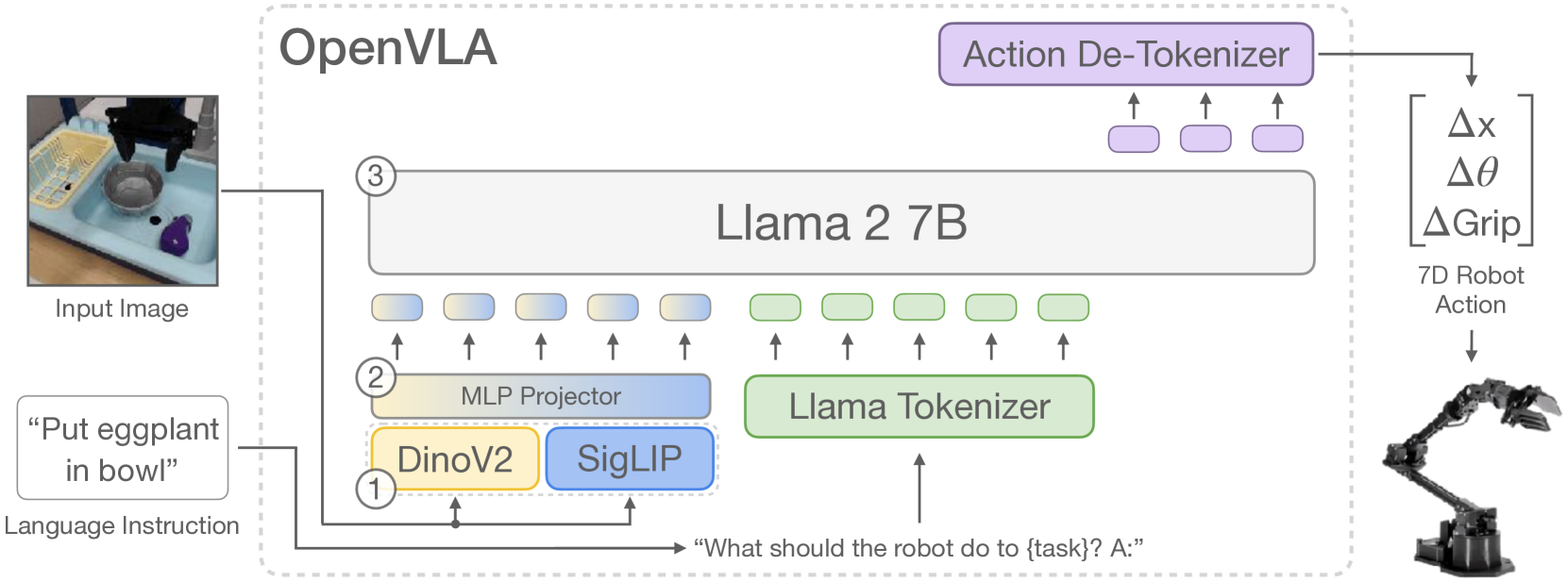
Large policies pretrained on a combination of Internet-scale vision-language data and diverse robot demonstrations have the potential to change how we teach robots new skills: rather than training new behaviors from scratch, we can fine-tune such vision-language-action (VLA) models to obtain robust, generalizable policies for visuomotor control. Yet, widespread adoption of VLAs for robotics has been challenging as 1) existing VLAs are largely closed and inaccessible to the public, and 2) prior work fails to explore methods for efficiently fine-tuning VLAs for new tasks, a key component for adoption. Addressing these challenges, we introduce OpenVLA, a 7B-parameter open-source VLA trained on a diverse collection of 970k real-world robot demonstrations. OpenVLA builds on a Llama 2 language model combined with a visual encoder that fuses pretrained features from DINOv2 and SigLIP. As a product of the added data diversity and new model components, OpenVLA demonstrates strong results for generalist manipulation, outperforming closed models such as RT-2-X (55B) by 16.5% in absolute task success rate across 29 tasks and multiple robot embodiments, with 7x fewer parameters. We further show that we can effectively fine-tune OpenVLA for new settings, with especially strong generalization results in multi-task environments involving multiple objects and strong language grounding abilities, and outperform expressive from-scratch imitation learning methods such as Diffusion Policy by 20.4%. We also explore compute efficiency; as a separate contribution, we show that OpenVLA can be fine-tuned on consumer GPUs via modern low-rank adaptation methods and served efficiently via quantization without a hit to downstream success rate. Finally, we release model checkpoints, fine-tuning notebooks, and our PyTorch codebase with built-in support for training VLAs at scale on Open X-Embodiment datasets.
6/14/2024

LLARVA: Vision-Action Instruction Tuning Enhances Robot Learning
Dantong Niu, Yuvan Sharma, Giscard Biamby, Jerome Quenum, Yutong Bai, Baifeng Shi, Trevor Darrell, Roei Herzig
0
0
In recent years, instruction-tuned Large Multimodal Models (LMMs) have been successful at several tasks, including image captioning and visual question answering; yet leveraging these models remains an open question for robotics. Prior LMMs for robotics applications have been extensively trained on language and action data, but their ability to generalize in different settings has often been less than desired. To address this, we introduce LLARVA, a model trained with a novel instruction tuning method that leverages structured prompts to unify a range of robotic learning tasks, scenarios, and environments. Additionally, we show that predicting intermediate 2-D representations, which we refer to as visual traces, can help further align vision and action spaces for robot learning. We generate 8.5M image-visual trace pairs from the Open X-Embodiment dataset in order to pre-train our model, and we evaluate on 12 different tasks in the RLBench simulator as well as a physical Franka Emika Panda 7-DoF robot. Our experiments yield strong performance, demonstrating that LLARVA - using 2-D and language representations - performs well compared to several contemporary baselines, and can generalize across various robot environments and configurations.
6/18/2024