Localization in Dynamic Planar Environments Using Few Distance Measurements

0
Sign in to get full access
Overview
- This paper presents a novel approach to localization in dynamic planar environments using just a few distance measurements.
- The method leverages the geometry of the environment and the motion of the robot to estimate its location, even with limited sensor data.
- The authors demonstrate the effectiveness of their approach through simulations and real-world experiments.
Plain English Explanation
In this paper, the researchers developed a new way for robots to figure out where they are in a constantly changing, flat environment using only a small number of distance measurements. Instead of relying on complex sensors or detailed maps, their technique takes advantage of the shape of the surroundings and the robot's own movement to estimate its location.
[This approach could be useful for robots navigating in dynamic, unstructured environments where traditional localization methods may not work as well, such as in real-time motion planning for autonomous vehicles or mobile robot sensory coverage in 2D environments.]
Through simulations and real-world tests, the researchers showed that their method can accurately locate the robot using just a few distance measurements, without needing detailed information about the environment. This could make it easier and more efficient for robots to navigate and perform tasks in constantly changing, complex spaces.
Technical Explanation
The key innovation of this paper is a localization algorithm that can estimate a robot's position using only a small number of distance measurements, even in dynamic planar environments. The authors leverage the geometry of the environment and the robot's motion to infer its location, rather than relying on detailed maps or complex sensor suites.
[The researchers demonstrate the effectiveness of their approach through simulations and real-world experiments, showing how it can be used for multi-robot collaborative localization and planning with inter-ranging or sensor-based distributionally robust control for safe robot navigation.]
The core of their algorithm is the use of a geometric constraint that relates the robot's position, the distance measurements, and the environment geometry. By incorporating this constraint into a Bayesian estimation framework, the authors are able to recursively refine the robot's location estimate as new distance measurements become available.
This approach contrasts with traditional localization methods that require detailed prior information about the environment or rely on more extensive sensor data, such as cameras or laser scanners. In dynamic settings where the environment is constantly changing, the ability to localize using just a few distance measurements can be a significant advantage.
Critical Analysis
A key strength of this research is its potential to enable robust localization in challenging, dynamic environments where traditional methods may struggle. By leveraging the geometry of the surroundings and the robot's motion, the authors have developed a localization approach that is less reliant on complex sensor suites or detailed environmental models.
However, the paper does acknowledge some limitations of the proposed method. For example, the geometric constraint used in the algorithm requires the environment to have certain structural properties, such as the presence of straight walls or other geometric features. In more unstructured or amorphous environments, the performance of this approach may degrade.
Additionally, the paper focuses on planar environments, leaving open the question of how well the method would generalize to 3D settings. Extending the geometric reasoning and estimation framework to handle the additional degrees of freedom could be an important area for future research.
[The authors also note that their current implementation assumes the robot's motion can be accurately modeled, which may not always be the case in real-world scenarios. Investigating more robust motion models or techniques to handle uncertainties in the robot's dynamics could further improve the reliability of the localization system.]
Overall, this research represents a promising step towards more efficient and versatile robot localization in dynamic environments. By thinking creatively about how to leverage the available sensor data and environmental information, the authors have developed an approach that could have broad applicability in robotics and autonomous systems.
Conclusion
This paper presents a novel localization algorithm that can estimate a robot's position in dynamic planar environments using just a few distance measurements. By incorporating the geometry of the surroundings and the robot's motion into a Bayesian estimation framework, the authors have developed a method that is less reliant on complex sensor suites or detailed environmental models than traditional approaches.
The researchers demonstrate the effectiveness of their technique through simulations and real-world experiments, showcasing its potential for applications in robotics and autonomous systems that require reliable localization in constantly changing environments. While the current approach has some limitations, such as its reliance on specific geometric features, the core ideas and underlying principles could inspire further innovations in this important area of research.
As robots continue to play an increasingly crucial role in our lives, the ability to localize accurately and efficiently will only become more crucial. This work represents an important step towards more robust and adaptable localization solutions that can help unlock the full potential of autonomous systems in a wide range of real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
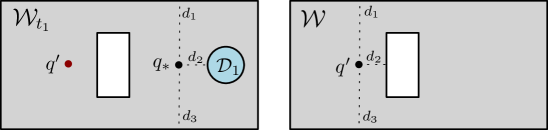
Localization in Dynamic Planar Environments Using Few Distance Measurements
Michael M. Bilevich, Shahar Guini, Dan Halperin
We present a method for determining the unknown location of a sensor placed in a known 2D environment in the presence of unknown dynamic obstacles, using only few distance measurements. We present guarantees on the quality of the localization, which are robust under mild assumptions on the density of the unknown/dynamic obstacles in the known environment. We demonstrate the effectiveness of our method in simulated experiments for different environments and varying dynamic-obstacle density. Our open source software is available at https://github.com/TAU-CGL/vb-fdml2-public.
Read more8/20/2024
0
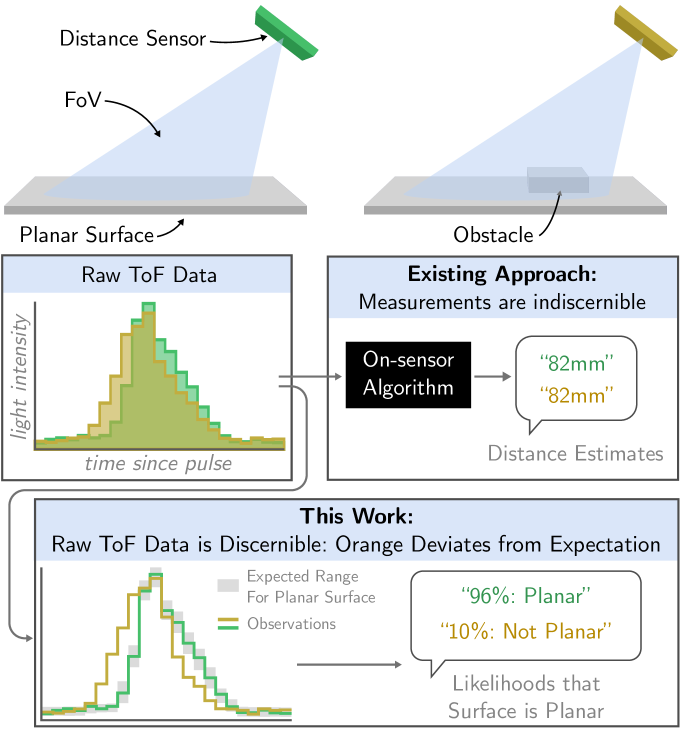
Using a Distance Sensor to Detect Deviations in a Planar Surface
Carter Sifferman, William Sun, Mohit Gupta, Michael Gleicher
We investigate methods for determining if a planar surface contains geometric deviations (e.g., protrusions, objects, divots, or cliffs) using only an instantaneous measurement from a miniature optical time-of-flight sensor. The key to our method is to utilize the entirety of information encoded in raw time-of-flight data captured by off-the-shelf distance sensors. We provide an analysis of the problem in which we identify the key ambiguity between geometry and surface photometrics. To overcome this challenging ambiguity, we fit a Gaussian mixture model to a small dataset of planar surface measurements. This model implicitly captures the expected geometry and distribution of photometrics of the planar surface and is used to identify measurements that are likely to contain deviations. We characterize our method on a variety of surfaces and planar deviations across a range of scenarios. We find that our method utilizing raw time-of-flight data outperforms baselines which use only derived distance estimates. We build an example application in which our method enables mobile robot obstacle and cliff avoidance over a wide field-of-view.
Read more8/9/2024
🧪
0
Localization with Single or Antipodal Distance Measurements
Barak Ugav, Steven M. LaValle, Dan Halperin
Given a polygonal workspace $W$, a depth sensor placed at point $p=(x,y)$ inside $W$ and oriented in direction $theta$ measures the distance $d=h(x,y,theta)$ between $p$ and the closest point on the boundary of $W$ along a ray emanating from $p$ in direction $theta$. We study the following problem: For a polygon $W$ with $n$ vertices, possibly with holes, preprocess it such that given a query real value $d> 0$, one can efficiently compute the preimage $h^{-1}(d) subset Wtimes mathbb{S}^1$, namely determine all the possible poses (positions and orientations) of a depth sensor placed in $W$ that would yield the reading $d$, in an output-sensitive fashion. We describe such an output-sensitive data structure, which answers queries in $O(k log n)$ time, where $k$ is the number of vertices and maximal arcs of low degree algebraic curves constituting the answer. We also obtain analogous results for the more useful case (narrowing down the set of possible poses), where the sensor performs two antipodal depth measurements from the same point in $W$. We then describe simpler data structures for the same two problems, where we employ a decomposition of $Wtimes mathbb{S}^1$, and where the query time is output-sensitive relative to this decomposition. Our software implementation for these latter structures is open source and publicly available. Although robot localization is often carried out by exploring the full visibility polygon of a sensor placed at a point of the environment, the approach that we propose here opens the door to sufficing with only few depth measurements, which is advantageous as it allows for usage of inexpensive sensors and could also lead to savings in storage and communication costs.
Read more6/12/2024
🖼️
0
CBGL: Fast Monte Carlo Passive Global Localisation of 2D LIDAR Sensor
Alexandros Filotheou
Navigation of a mobile robot is conditioned on the knowledge of its pose. In observer-based localisation configurations its initial pose may not be knowable in advance, leading to the need of its estimation. Solutions to the problem of global localisation are either robust against noise and environment arbitrariness but require motion and time, which may (need to) be economised on, or require minimal estimation time but assume environmental structure, may be sensitive to noise, and demand preprocessing and tuning. This article proposes a method that retains the strengths and avoids the weaknesses of the two approaches. The method leverages properties of the Cumulative Absolute Error per Ray (CAER) metric with respect to the errors of pose hypotheses of a 2D LIDAR sensor, and utilises scan--to--map-scan matching for fine(r) pose estimations. A large number of tests, in real and simulated conditions, involving disparate environments and sensor properties, illustrate that the proposed method outperforms state-of-the-art methods of both classes of solutions in terms of pose discovery rate and execution time. The source code is available for download.
Read more7/8/2024