Localization with Single or Antipodal Distance Measurements

0
🧪
Sign in to get full access
Overview
- This paper presents an efficient data structure for solving the preimage problem for depth sensors in a polygonal workspace.
- The preimage problem is to determine all the possible positions and orientations of a depth sensor that would yield a given depth measurement.
- The paper describes an output-sensitive data structure that can solve this problem in O(k log n) time, where k is the number of vertices and maximal arcs in the solution.
- The paper also considers the case where the sensor performs two antipodal depth measurements, which can further narrow down the set of possible poses.
- The paper presents simpler data structures for these problems, with query times that are output-sensitive relative to a decomposition of the workspace.
Plain English Explanation
The paper is about a problem that comes up when using depth sensors, like those found in many robots and other devices. Imagine you have a sensor that can measure the distance to the nearest wall or object in a certain direction. The preimage problem is: if the sensor reports a certain distance, what are all the possible places and orientations the sensor could be in to get that reading?
The researchers describe a way to efficiently solve this problem, by preprocessing the workspace (the area the sensor is in) and storing the information in a data structure. Then, when you ask the system "What are all the possible sensor positions and orientations that could give a reading of X?", it can quickly figure that out using the preprocessed data.
This is useful because it allows you to narrow down the possible locations and orientations of a sensor based on just a few depth measurements, rather than having to do a full exploration of the workspace. This could save time and resources, since you don't need expensive sensors or a lot of storage and communication bandwidth.
Technical Explanation
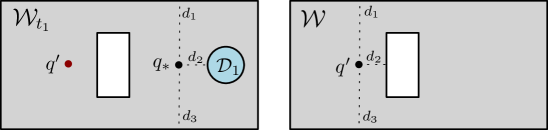
The researchers consider a polygonal workspace W, with a depth sensor placed at a point p=(x,y) inside W and oriented in direction θ. The sensor measures the distance d=h(x,y,θ) to the closest point on the boundary of W along a ray in direction θ.
The key problem they address is: for a polygon W with n vertices, preprocess it so that given a query depth d, one can efficiently compute the preimage h^(-1)(d) ⊂ W×S¹, i.e., the set of all sensor poses (position and orientation) that could yield the depth reading d.
The researchers describe an output-sensitive data structure that can solve this problem in O(k log n) time, where k is the number of vertices and maximal arcs of low-degree algebraic curves that make up the preimage. This means the query time depends on the complexity of the actual solution, not just the size of the workspace.
They also consider the case where the sensor performs two antipodal depth measurements from the same point, which can further constrain the set of possible poses. For this, they develop analogous output-sensitive data structures.
Additionally, the researchers present simpler data structures for these problems, where they employ a decomposition of W×S¹, and the query time is output-sensitive relative to this decomposition. They provide an open-source software implementation of these structures.
Critical Analysis
The researchers acknowledge that their approach, while efficient, is not as comprehensive as fully exploring the visibility polygon of a sensor's location. However, they argue that their method of using only a few depth measurements can be advantageous in situations where cost, storage, or communication bandwidth are concerns.
One potential limitation is the reliance on low-degree algebraic curves to represent the preimage. While this allows for efficient queries, it may not be able to capture more complex shapes that could arise in real-world workspaces. Further research could explore alternative representations that maintain efficiency while allowing for greater flexibility.
Additionally, the paper does not address how the data structures would handle dynamic changes to the workspace, such as moving obstacles. Extending the techniques to cope with non-static environments could be an interesting area for future work.
Overall, this research presents a novel and efficient approach to the preimage problem for depth sensors, which could have practical applications in robot localization and other fields where depth information is used. The researchers' focus on output-sensitivity and the availability of their software implementation make this work a valuable contribution to the field.
Conclusion
This paper introduces an efficient data structure for solving the preimage problem for depth sensors in a polygonal workspace. By preprocessing the workspace, the system can quickly determine all the possible positions and orientations of a sensor that could yield a given depth reading.
The researchers' approach is particularly useful in situations where cost, storage, or communication bandwidth are concerns, as it allows for accurate pose prediction using only a few depth measurements, rather than requiring a full exploration of the workspace.
While the technique has some limitations, such as the reliance on low-degree algebraic curves, the paper's contribution of efficient, output-sensitive data structures and the availability of the software implementation make it a valuable resource for researchers and practitioners working on sensor-based localization and related problems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧪
0
Localization with Single or Antipodal Distance Measurements
Barak Ugav, Steven M. LaValle, Dan Halperin
Given a polygonal workspace $W$, a depth sensor placed at point $p=(x,y)$ inside $W$ and oriented in direction $theta$ measures the distance $d=h(x,y,theta)$ between $p$ and the closest point on the boundary of $W$ along a ray emanating from $p$ in direction $theta$. We study the following problem: For a polygon $W$ with $n$ vertices, possibly with holes, preprocess it such that given a query real value $d> 0$, one can efficiently compute the preimage $h^{-1}(d) subset Wtimes mathbb{S}^1$, namely determine all the possible poses (positions and orientations) of a depth sensor placed in $W$ that would yield the reading $d$, in an output-sensitive fashion. We describe such an output-sensitive data structure, which answers queries in $O(k log n)$ time, where $k$ is the number of vertices and maximal arcs of low degree algebraic curves constituting the answer. We also obtain analogous results for the more useful case (narrowing down the set of possible poses), where the sensor performs two antipodal depth measurements from the same point in $W$. We then describe simpler data structures for the same two problems, where we employ a decomposition of $Wtimes mathbb{S}^1$, and where the query time is output-sensitive relative to this decomposition. Our software implementation for these latter structures is open source and publicly available. Although robot localization is often carried out by exploring the full visibility polygon of a sensor placed at a point of the environment, the approach that we propose here opens the door to sufficing with only few depth measurements, which is advantageous as it allows for usage of inexpensive sensors and could also lead to savings in storage and communication costs.
Read more6/12/2024
0
Localization in Dynamic Planar Environments Using Few Distance Measurements
Michael M. Bilevich, Shahar Guini, Dan Halperin
We present a method for determining the unknown location of a sensor placed in a known 2D environment in the presence of unknown dynamic obstacles, using only few distance measurements. We present guarantees on the quality of the localization, which are robust under mild assumptions on the density of the unknown/dynamic obstacles in the known environment. We demonstrate the effectiveness of our method in simulated experiments for different environments and varying dynamic-obstacle density. Our open source software is available at https://github.com/TAU-CGL/vb-fdml2-public.
Read more8/20/2024
0
Using a Distance Sensor to Detect Deviations in a Planar Surface
Carter Sifferman, William Sun, Mohit Gupta, Michael Gleicher
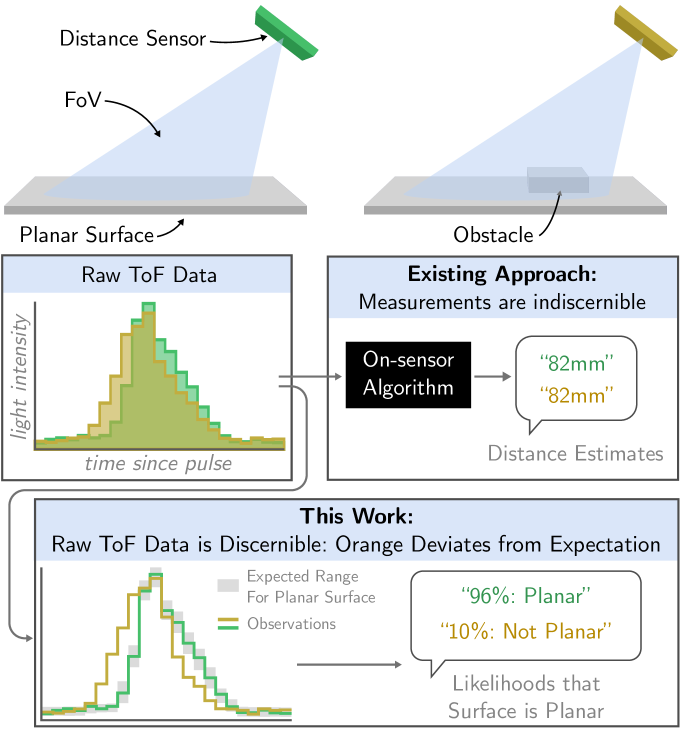
We investigate methods for determining if a planar surface contains geometric deviations (e.g., protrusions, objects, divots, or cliffs) using only an instantaneous measurement from a miniature optical time-of-flight sensor. The key to our method is to utilize the entirety of information encoded in raw time-of-flight data captured by off-the-shelf distance sensors. We provide an analysis of the problem in which we identify the key ambiguity between geometry and surface photometrics. To overcome this challenging ambiguity, we fit a Gaussian mixture model to a small dataset of planar surface measurements. This model implicitly captures the expected geometry and distribution of photometrics of the planar surface and is used to identify measurements that are likely to contain deviations. We characterize our method on a variety of surfaces and planar deviations across a range of scenarios. We find that our method utilizing raw time-of-flight data outperforms baselines which use only derived distance estimates. We build an example application in which our method enables mobile robot obstacle and cliff avoidance over a wide field-of-view.
Read more8/9/2024

0
Object Depth and Size Estimation using Stereo-vision and Integration with SLAM
Layth Hamad, Muhammad Asif Khan, Amr Mohamed
Autonomous robots use simultaneous localization and mapping (SLAM) for efficient and safe navigation in various environments. LiDAR sensors are integral in these systems for object identification and localization. However, LiDAR systems though effective in detecting solid objects (e.g., trash bin, bottle, etc.), encounter limitations in identifying semitransparent or non-tangible objects (e.g., fire, smoke, steam, etc.) due to poor reflecting characteristics. Additionally, LiDAR also fails to detect features such as navigation signs and often struggles to detect certain hazardous materials that lack a distinct surface for effective laser reflection. In this paper, we propose a highly accurate stereo-vision approach to complement LiDAR in autonomous robots. The system employs advanced stereo vision-based object detection to detect both tangible and non-tangible objects and then uses simple machine learning to precisely estimate the depth and size of the object. The depth and size information is then integrated into the SLAM process to enhance the robot's navigation capabilities in complex environments. Our evaluation, conducted on an autonomous robot equipped with LiDAR and stereo-vision systems demonstrates high accuracy in the estimation of an object's depth and size. A video illustration of the proposed scheme is available at: url{https://www.youtube.com/watch?v=nusI6tA9eSk}.
Read more9/14/2024